在选型1FK7伺服电机时,对旋变编码器,看得模糊SIZER区分有多极旋变、单极旋变、14位旋变、15位旋变,在一般常识中,知道有多极、单极之分,但14/15位是是否也是单极或多极的分支?即不分单极或多极,最终分辨率就是14位、15位?
性价比上,这些旋变,哪款高些?
2023-11-16 06:14:31
最近在用AD2S1210来测试旋变的时候遇到一个问题:示波器探针夹cos,示波器黑夹子夹coslo,在一段时间内会出现一个畸形波,同时测到EXC引脚也有畸形波输出,如图片和附件所示,但晶振方面
2016-07-21 21:35:31
各位大神,旋变解码电路请教一下,我用的是AD1200,调试的时候发现不同批次的AD1200,通电后会出现DOS灯亮,最终旋变报警
2020-02-22 11:26:10
如果旋变输出的波形不接AD2S1200,输出的正旋差分信号是完全符合AD2S1200的输入的,直接接示波器波形如下图1:
图1 旋变输出的信号直接接示波器
图2 旋变输出的sin
2023-12-21 06:48:46
你好,在使用贵公司的旋变数字转换器AD2S80A时遇到旋变输出信号与参考信号相移问题,查询手册发现疑问,请求解答和帮助。先说一下现象: 我使用的位置传感器为双通道的正余弦旋转变压器,指标为:励磁为
2019-02-28 13:37:06
电机控制之旋变及位置反馈解决方案篇其它话题的热门问答请前往总贴查看。http://www.deyisupport.com/question_answer/microcontrollers/c2000
2020-05-20 09:33:31
灵敏了,忽左忽右,不是很稳定。后来查了资料后知道了其他的调节方式。控制算法电机控制算法的作用是接受指令速度值,通过运算向电机提供适当的驱动电压,尽快地和尽快平稳地使电机转速达到指令速度值,并维持这...
2021-09-07 06:14:46
在测试并行输出时,我以上图红线所示的时序,想连续的读出旋变的位置数据,为什么每次读出的只是一个值,不随旋变转子的变化而变化,只有将RD拉高再拉低时才会输出下一个位置数据?
2023-12-22 06:17:29
控制器正在调试,急急急!!!使用AD2S1205旋变芯片,控制器调试过程中电机正常运行中,突然报DOS故障并且此故障锁存至低电平,经查看DATASHEET,为正余弦失配,但是电机还能正常运转。问题1
2018-08-09 06:15:36
急急急!!!使用AD2S1205旋变芯片,控制器调试过程中电机正常运行中,突然报DOS故障并且此故障锁存至低电平,经查看DATASHEET,为正余弦失配,但是电机还能正常运转,请问如何消除此故障?如果不消除会影响正常运行吗?正余弦电路如下谢谢大家,提供宝贵建议或意见。
2019-02-13 14:20:44
,第一张图是SIN和地之间的电压信号第二张是旋变输出来的SIN与SINLO的电压信号第三张是旋变滤波后的电压信号这里我给电机没有通电,只将电机上的旋变和AD2S1205进行了连接@
2019-01-25 08:34:14
只给AD2S1205那个板子上电,得到的旋变的激励信号是正确的(此时没有与旋变连接),此后与旋变连接上电,得到的激励信号就是很大的错误,也没有旋变输出的信号SIN/SINLO/COS/COSLO,在
2023-12-08 08:25:05
使用AD2S1205采集多摩川旋变TS2640N321E64的位置数据时,范围为0-4096,匀速旋转旋变,0-1023位置信息均匀,然后会突然从1023跳变到3071,此时旋变只是旋转了很小的一个角度,再继续旋转旋变,位置从3072到4096均匀变化,请问为什么会出现这样的问题呢?
2020-11-27 11:27:50
您好,在与旋变匹配时,LOS、DOS未出现故障,但是LOT周期性出现故障信号?请问LOT故障具体由什么原因产生?有什么解决方案?
2023-12-15 07:13:29
AD2S1205旋变芯片,单板测试,未接入旋变时,AD2S1205的增量式编码器输出A/B就有信号了,而且方波频率在几K到十几K之间,这是什么原因造成的?
2023-12-12 06:22:53
AD2S1205旋变芯片,单板测试,未接入旋变时,AD2S1205的增量式编码器输出A/B就有信号了,而且方波频率在几K到十几K之间,这是什么原因造成的?
2018-08-07 08:44:22
使用AD2S1210解码旋变测电机的角度和位置。使用过程中发现当电机的驱动电压增大,但是转速较低时,读得的旋变角度信号会不定时的出现错误,导致电机控制震荡。但是如果是同样的驱动电压,电机转速较高
2018-11-14 09:19:05
我购买了一块AD2S1210的评估板和转接板,用来解码多摩川的旋变。如下图所示,旋变还没有装到电机上,但是足够读取原副边线圈的正余弦波形。
现在通过上位机设置,激励正弦信号是10kHz
2023-12-04 06:41:31
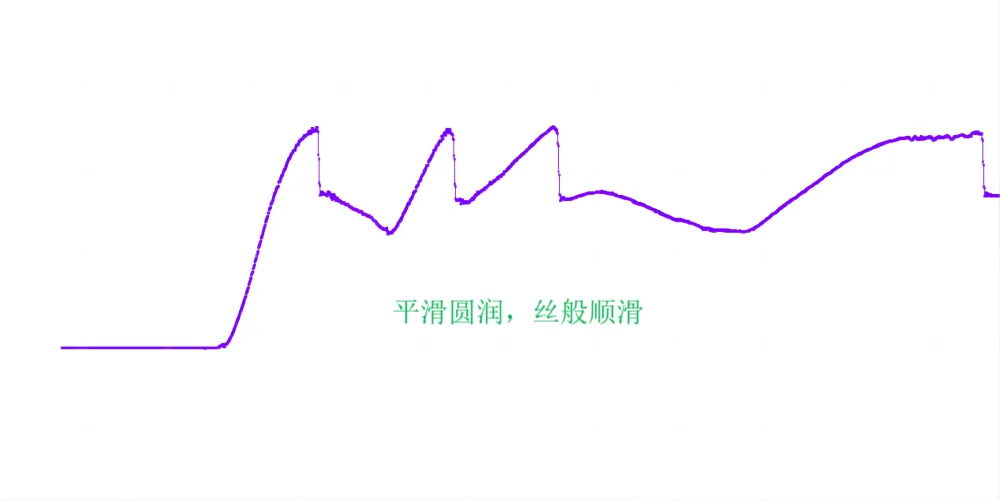
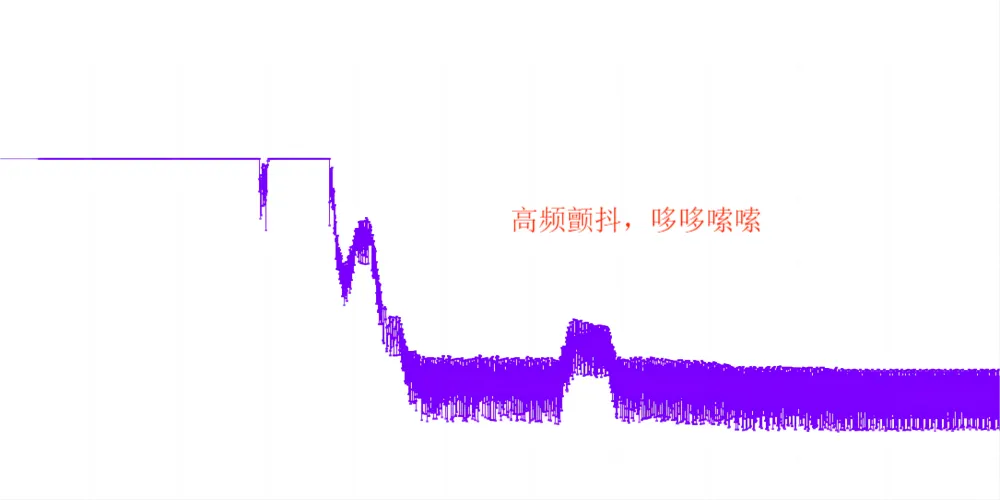
看一下,波形是好的。
问题1:可以看到旋变的位置跳变是有一定规律的,但又不是电机的一圈,已经转了多圈,虽然我怀疑是旋变安装问题,但是示波器没有抓到对应波形,还有没有其他方法能确定是旋变
2023-12-07 07:17:27
我最近一个项目上用到AD2S1210去解码旋变信号,但发现上电没有激磁信号(没有工作),没有晶振信号。但是,一上电就有40mA(5V),而且 MCU的SDO,SDI,CLK, CS, SAMPLE
2019-01-22 09:03:27
用评估板EVAL-AD2S1210EDZ 采集旋变信息,旋变型号为多摩川TS2640N320E64,评估板连接自己做的DSP板,然后DSP与PC机通过串口连接,DSP通过并口访问控制AD2S1210
2018-10-12 09:12:51
现在使用AD2s1205对旋变进行解码
当使用下图旋变1的时候,可以正常解码,无故障发生;
当使用下图旋变2的时候,解码出现信号降级的情况。
示波器测量相关信号,旋变2相关信号为:
exc
2023-12-04 07:27:19
STM32控制电调驱动两个无刷电机,四旋翼对轴平衡调试。
2018-07-14 11:03:01
上图是新能源旋变器的转子和定子示意图,极对数是4、励磁电压有效值是7V、励磁频率10KHz、输出电压有效值2+-10%、相位移15°、变比等于输出电压有效值/励磁电压有效值,即2V/7V
2021-09-06 10:47:34
于汽车和工业应用中,用来提供电机轴位置和速度的反馈信息。AD2S1210是一款完整的10位至16位分辨率RDC,片内集成了可编程正旋波振荡器,为旋变器提供激励信号。由于工作环境恶劣,AD2S1210
2021-05-21 21:46:25
大家下午好!今天给大家带来【旋变驱动电路OCL电路避免交越失真设计】讲解视频,我们会持续更新,有问题可以留言一同交流讨论。上期回顾:如何避免OCL电路交越失真设计
2021-12-13 18:02:03
目录四旋翼构型简单力学分析什么是欧拉角几个自由度螺旋桨空心杯电机脉冲宽度调制(PWM)技术控制初探Visio,CAD和Solidworks画图是在太累了,接下来我会主要使用手绘来配图,大家理解一下哈
2021-07-06 06:39:15
最近做项目发现一个问题,旋变解码电路按照adi官方提供的参考电路也一直正常使用无问题,最近客户拿过来一个电机让匹配接上后发现经常报位置跟踪丢失的故障,检查后发现反馈的信号滤波器后比滤波器前滞后了几度
2023-12-12 06:38:58
可靠的测量位置、转速传感器,广泛应用于工业驱动和新能源汽车。通过阅读本文,您可以了解到:什么是旋变,它是如何工作的,旋变的相关应用和目前市场上存在哪些方案。[/url]图1 电机驱动系统的基本框图1.
2017-08-22 10:16:59
伺服电机的转矩控制模式是什么意思?伺服电机的转矩控制模式有何作用?
2021-10-08 07:06:16
我使用AD2S1205进行旋转变压器的数据处理,旋变安装在电机上
使用的是并行传输和模拟的编码器输出。
做测试时发现模拟编码器输出的信号有干扰,可能是外界干扰,如图1所示
图1
图中两路
2023-12-22 07:51:30
使用AD2S1210解码旋变测电机的角度和位置。使用过程中发现当电机的驱动电压增大,但是转速较低时,读得的旋变角度信号会不定时的出现错误,导致电机控制震荡。但是如果是同样的驱动电压,电机转速较高
2023-11-27 06:13:00
只需通过改变四个马达的转速即可实现控制,且飞行机动能力更加灵活。 另一方面,小型四旋翼飞行器具有较高的操控性能,并具有在小区域范围内起飞,盘旋,飞行,着陆的能力。因此我们根据四旋翼飞行器的特点,提出
2019-04-05 07:00:00
运转速度可划分:第3章 电动汽车动力系统的工作原理第4章 电机的组成与构造4.1 构造图4.2 实物图4.3 旋变传感器4.4 温度传感器第1章 驱动电机控制器概述电机(英文:Electric machinery,俗称“马达”)是指依据电磁感应定..
2021-06-30 06:53:47
四旋翼的旋翼对称分布,4个旋翼处于同一高度水平面上,他们的结构和半径都相同。通过改变四个电机的转速就可以实现升力的变化,从而控制飞行器的姿态和位置。1)当四个电机同时加速或同时减速时,飞行器会垂直
2021-09-13 06:54:55
跪求四旋翼飞机PID控制以及姿态控制算法等MATLAB仿真资料,谢谢
2015-07-17 11:33:09
四旋翼飞行器控制模型为便于建立模型,现对四旋翼飞行器进行以下假设:1、四旋翼飞行器是均匀对称的刚体2、四旋翼飞行器的质量和转动惯量不发生改变3、四旋翼飞行器的几何中心与其重心重合4、四旋翼飞行器只受
2021-09-15 07:22:37
四旋翼微型飞行器是一种以4个电机作为动力装置.通过调节电机转速来控制飞行的欠驱动系统;为了实现四旋翼微型飞行器的自主飞行控制,对飞行控制系统进行了初步设计,并且以C8051F020单片机为计算控制
2013-11-28 09:29:12
不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力不稳定,所以需要一种能够长期确保稳定的控制方法。四旋翼飞行器
2019-02-18 15:02:22
软件实现旋变解码的可行性及其解决方案。并结合当前比较流行的汽车功能安全标准ISO26262,阐述英飞凌在汽车电机控制器的安全应用解决方案。关键词:PMSM;Audo-MAX;ISO26262;FOC
2018-12-04 09:50:05
的旋转变压器来进行电机位置和速度的检测。旋转变压器的处理解码芯片多选用Analog Devices公司的旋变解码芯片。按照旋变本身的特性,匹配不同的放大电路,最终将旋变的信号送到处理芯片。本设计中所
2018-12-06 10:03:01
,支架中间空间安放飞行控制计算机和外部设备。结构形式如图 1.1所示。2.工作原理 四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六
2016-12-23 23:20:13
飞行原理 四旋翼的结构组装有十字模式和X模式之分,两者的基本原理一致,方向结构不同,都是通过四个电机的组合状态进行控制姿态飞行,而十字型四旋翼机头是对准其中一个电机的,X型的四旋翼四个电机在对
2021-07-19 06:34:31
程上限),数显表就可以实现测量值的变送输出。数显表变送输出的作用在于将实时测量值以电流或电压形式远传至其他仪表或设备使用,数显表变送输出与测量值之间为一一对应关系。数显表控制输出特指调节器或手动操作器
2018-11-18 18:27:59
和新能源汽车。通过阅读本文,您可以了解到:什么是旋变,它是如何工作的,旋变的相关应用和目前市场上存在哪些方案。 图1 电机驱动系统的基本框图1. 什么是旋转变压器?旋转变压器(Resolver),简称
2022-11-14 06:33:47
飞行控制计算机和外部设备。结构形式如图 1.1所示。注意上图中,四个螺旋桨的旋转方向:两个逆时针,两个顺时针。四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行
2019-10-30 07:00:00
ad2s1210 传真: ad2s1210对于旋变输出信号SIN、原 原 原 意、COS、COslo 上球有如下要求:
相对于agnd 向量的SIN、原意、COS和COslo 上球电压必须始终在
2023-12-04 07:51:37
。 旋变数字转换器很多电机控制系统采用可变轴旋转速度工作。为了提供最精确的位置信 息,需使用分辨率灵活的系统。AD2S1210是一款旋变数字转换器,可即时 改变分辨率。这款转换器提供了一种集成式
2018-10-25 10:03:48
运算放大器在电机控制系统中用做信号调理。它们将用于ADC接口传感器,因而需要高线性度轨到轨输入和输出。它们还能用 在旋变数字转换器(RDC)和旋变器之间,以高压摆率和高精度提供高电流。 带宽更宽的放大器
2018-10-25 10:18:40
电动轮车的后置电机控制器的作用是什么?求解答
2023-03-09 16:42:04
可变耦合变压器的方式工作,其初级绕组和两个次级绕组之间的磁耦合量根据旋转部件(转子)位置而改变;转子通常安装在电机轴上。旋变器可部署在工业电机控制、伺服器、机器人、混合动力和全电动汽车中的动力系统单元
2018-10-25 10:16:18
简介旋变器和机电传感器可用来精确测量角位置,以可变耦合变压器的方式工作,其初级绕组和两个次级绕组之间的磁耦合量根据旋转部件(转子)位置而改变;转子通常安装在电机轴上。旋变器可部署在工业电机控制
2019-10-28 08:00:00
,以可变耦合变压器的方式工作,其初级绕组和两个次级绕组之间的磁耦合量根据旋转部件(转子)位置而改变;转子通常安装在电机轴上。旋变器可部署在工业电机控制、伺服器、机器人、混合动力和全电动汽车中的动力系统
2018-10-15 10:26:48
、整形器、积分器、辅助滤波器和极限比较检查单元这些丰富的功能环节组合。在目前的伺服控制器应用中,基本上都是采用外部专用的旋变解码芯片获得旋变位置信息。相对专用芯片,Delta-Sigma解调器模块
2018-12-11 10:56:24
要实现电机的精确控制和高效换向,高分辨率电流和旋转位置信息至关重要。一般而言,在基于旋变器的系统中,分辨率和精度可能非常高,但终端解决方案可能价格昂贵且体积较大,这是因为旋变器本身会占用较大的物理
2018-10-29 16:36:11
电机的旋变是四根线,没有sinlo,coslo,那么我在输入到AD2S1200的时候,sinlo,coslo应该接地还是接什么?sin,cos的幅值是3.6V还是1.8V?
2018-10-09 15:48:54
电机的旋变是四根线,没有sinlo,coslo,那么我在输入到AD2S1200的时候,sinlo,coslo应该接地还是接什么?sin,cos的幅值是3.6V还是1.8V?
2023-12-20 06:14:08
只给AD2S1205那个板子上电,得到的旋变的激励信号是正确的(此时没有与旋变连接),此后与旋变连接上电,得到的激励信号就是很大的错误,也没有旋变输出的信号SIN/SINLO/COS/COSLO,在
2018-07-31 06:14:43
各位好,我目前要用到DSP控制4个电机(4个旋变及4个AD2S1210),我想请教一下,推荐用哪种方式,用SPI还是数据总线容易实现,AD2S1210看论坛问题不少,没用过,心里犹豫,请指教!!!!
2018-10-19 09:38:44
四旋翼电机好像没办法装测速码盘?请问怎么可以装呢,?或者请各位大神推荐一个测速的好方法吧,
2019-03-28 05:08:18
[tr][td]有没有把旋变集成到主芯片里的片子呢?它的外围需要什么配置呢?[/td][/tr]
2018-12-13 17:13:04
目前旋变处理芯片,官方是推荐AD2S1210还是1205?选型需要,例如,如果都配置为12位,两者的性能有差别么?
2018-10-26 09:23:04
控制器支持多协议(Profinet、EtherCAT、EthernetIP、TSN)• NETX90和MCU之间的DPM和SPM接口• 电机控制功率级,基于STDRIVE101和STH270N8F7功率
2023-09-08 07:35:03
机电控制中伺服电机的作用伺服电动机又叫执行电动机,或叫控制电动机。在自动控制系统中,伺服电动机是一个执行元件,它的作用是把信号(控制电压或相位)变换成机械
2010-02-25 17:48:27 90
90 在BLDC无刷直流电机的换向应用中,锁存器可以说发挥了很大作用,能够稳定斩波提供准确而稳定的磁开关点。在低成本运用上霍尔锁存IC在电机控制上的作用有着不小的低功耗的优势,同时极为可靠。
2021-12-25 09:54:21 7040
7040 伺服电机是一种可以通过控制器精确地控制位置、速度和加速度的电机。伺服电机通常由电机、编码器、控制器等部分组成。控制器根据编码器反馈的位置信息,调节电机的驱动电流,从而控制电机的位置和运动。因此在很多需要高精度运动控制的领域得到了广泛应用。
2023-03-03 11:17:278928 一.原理旋变,是电机控制中常用的一种位置传感器,旋转变压器的作用就是精准测量电机转子的位置、转速及旋转方向,将这些信号传输给电控,由软件的控制算法来控制电机。它可以控制三相交流电的频率和次序,从而
2023-08-02 08:09:333125 
电机控制系统的组成及其作用电机控制系统是由多个组件组成的,每个组件都有特定的作用,下面是电机控制系统的常见组成及其作用:1.电源:电源提供电能给电机运行,通常是通过交流电源或直流电源来供电。它为整个
2023-08-30 08:08:445116 电机控制器的组成及作用电机控制器是用于控制和驱动电动机运行的设备,它通常由以下几个组成部分组成:1.电源(PowerSupply):为电动机控制器提供所需的电能,通常是直流或交流电源。2.控制
2023-09-24 08:08:581385 伺服电机速度增益的作用 伺服电机速度增益是伺服控制系统中的一个重要参数,它对于电机的运行速度和稳定性起着关键作用。本文将详尽、详实、细致地介绍伺服电机速度增益的作用。 一、伺服电机的基本原理 伺服
2023-12-25 13:57:55560 电机控制管理系统是一种用于监控和控制电机运行的系统,它通过对电机的电流、电压、转速等参数进行实时监测和调节,实现对电机的高效、稳定和安全的运行。电机控制管理系统在工业生产、交通运输、家用电器等领域
2024-01-19 15:16:24333
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论