相机标定中所要确定的几何模型参数分为内参和外参两种类型。相机内参的作用是确定相机从三维空间到二维图像的投影关系。相机外参的作用是确定相机坐标与世界坐标系之间相对位置关系。
2022-10-12 16:04:18 3607
3607 单目相机标定技术适用于被测表面曲率较小且需要获取实际数据的应用场合,比如食品、机械制造以及半导体等。
2023-07-21 11:32:274496 
本文主要介绍如何通过正运动VPLC711视觉接口来实现相机标定和形状匹配功能。
2024-06-26 15:11:101756 
Halcon旋转标定固定相机,从下往上拍照,计算产品到标准位置的偏差,如果产品有角度偏差,那就要额外减去旋转产生的X、Y偏移,都说取点拟合圆,圆心就是旋转中心点,可是我拟合出来的圆心转换成机器人
2021-11-09 15:36:24
几篇张正友标定方法的英文原文,不少朋友看过张正友标定方法,这里提供他的英文原文。喜欢看英文文献的,以及愿意更深入理解matlab中相机标定工具箱的朋友可以参考。
2018-05-04 14:43:25
这里相机标定主要内容包括:图像的采集、相机参数获取、TOOLBOX_calib可视化描述一、相机标定感谢博主的代码分享,这里主要参考了一些(https://download.csdn.net
2021-08-18 07:24:03
相机包带加厚肩带 摄影包相机包电脑包减压弹力单肩带 背带金属扣
2023-03-28 13:03:52
DLP_LightCrafter_4500_3D_Scan_Application 软件进行相机和投影仪标定时,进入相机拍照界面后,程序未响应然后退出,参考手册DLPU019B没有相关处理,请问有解决办法吗?
2025-02-26 06:14:06
随着视觉惯性传感器在自动驾驶、机器人、AR/VR 等领域规模化落地,多相机+IMU 联合标定需求呈爆发式增长,多相机+IMU 联合标定领域尚属空白。
感算商城联合知名方案公司推出国内首台量产级
2025-10-23 14:04:48
``【课程推荐】龙哥手把手教你学LabVIEW机器视觉设计教程请问哪位大神有Labview机器视觉相机标定的程序文件,麻烦分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
投影:DLP4500
相机:PointGray相机,具体型号:FL3-U3-13Y3M USB 3.0
SDK可以连接到相机与投影,且已完成相机标定(Calibrate camera),在进行系统标定(Calibrate system)时投影仪不打光,无法继续完成标定。
2025-02-20 08:23:35
相机标定不成功点击下一步没反应
2015-04-16 12:58:59
labview标定图片不成功 点击下一步没反应
2015-04-16 12:57:25
最近在做视觉,需要用labview做相机的标定,通过空间转换确定空间位置。视觉助手的标定只能标定内参数,没有办法做内外参数的标定,哪位大神给指导指导如何做一个标准的标定程序。
2017-04-24 16:08:44
是左右相机拍摄同一块圆形标定板的图像,并根据labview自带的圆点标定板圆点检测函数得到圆点坐标。下图是加载圆点标定板标定结果后,加载一对图像后,鼠标移动到左图上显示的距离信息。程序框图分3部分
2021-09-27 16:52:18
主要内容本文提出了一种不依赖于棋盘格等辅助标定物体,实现像素级相机和激光雷达自动标定的方法。方法直接从点云中提取3D边特征,一避免遮挡问题,并且使用了精确度更高的深度连续边。文中首先指出:以下四种
2021-09-01 07:42:19
目标平面与成像平面平行,但是摄像头与目标平面相对位置是改变的,那么:1,相机标定后获得的参数还能不能用,因为我看有的说相机标定后的参数用于相机与工作平面的相对位置不变。所以不知道了2,如果参数不能
2016-05-20 15:49:27
医疗器械的标定1.体温计标定----用黑体炉+恒温水槽,标定两个点2.血压计标定----用BP pump血压计模拟器,各不相同3.血氧仪标定----血氧模拟器标定哪个知道具体标定的过程和方法?
2021-09-22 17:27:07
,如何使用大标定板统一坐标来做高精密测量。采用一块维视图像大标定板来统一各个相机的坐标,每个大标定板中有若干小标定板,各个小标定板间的位置关系都是已知的,各个相机都能拍摄到一个小标定板。通过各个小标定板可以
2015-11-18 11:05:45
、标定精度也不够理想。基于模型的电机标定方法,鲁棒性强,测试点少,提高测试效率,将MTPA和弱磁放在一张表格中标定,可同时实现基速以下以及高速弱磁区效率最优控制,采用GUI,易操作,弱化电机背景知识。通...
2021-08-27 06:01:41
小白求助,求相机标定示例
2021-11-22 07:43:41
现在有一款相机配合远心镜头使用,产品比较小,比较精密,视野也很小,差不多也就1厘米吧,像这种情况一般怎么进行标定,是用那种比较精密的标定板吗?还有别的办法吗?论坛有视觉大神答疑解惑吗?
2020-01-03 16:58:31
摄像机标定是什么?如何对摄像机标定进行分类?传统摄像机标定方法分为哪些?摄像机自标定方法有哪些?
2021-04-13 06:10:19
温度传感器的标定和大多数其它传感器的标定一样,最普遍的方法就是将传感器放置在一个可精确测定的、已知温度的环境中一段时间,然后记录检查传感器的输出是否与已知的环境温度一致,并计算出传感器的误差。那么
2016-01-11 16:39:59
lidar_camera_calibration项目——激光雷达和相机联合标定
2019-04-12 09:27:38
`红外体温计标定方法是怎么样的?用体温计去测试黑体炉温度?黑体炉设置不同的温度,体温计测试后再比对黑体炉显示的温度?如果有偏差就修正,找出对应的函数关系?是不是这样的思路?同行都是怎样的标定方法?哪种方法更准一些`
2020-03-03 08:18:28
有个项目要用视觉定位,视觉拍好产品之后,把产品的坐标发送到PLC,PLC再执行定位指令。现在查到的资料都没有涉及这一块,都是讲相机标定,而不是手眼标定。哪位有这方面的资料,怎么用labview实现手眼标定?
2020-05-28 14:42:35
提出一种无相机标定的立体图像对的极线校正新方法。该校正方法并不依赖基本矩阵F的精确求解,而是通过空间变换法分析校正前后图像点对应关系,依此分解并参数化描述极线变
2009-04-14 08:40:01 12
12 光学标定板应用领域宏诚光学玻璃系列标定板和陶瓷系列标定板是专为高校实验、研究单位项目研发和机器视觉集成商产品标定等等客户群体使用的常用标定工具,能够方便获得相机的标定数据。标定板作用:为校正镜头畸变
2022-09-20 08:14:32
本文提出一种基于图像轮廓进行相机自标定并计算投影矩阵从而恢复物体三维模型的方法。首先使用镜面反射从图像中获取物体的多角度成像并利用阈值和边缘提取得到图像的轮
2009-12-07 11:53:5019 以简化以往的摄像机标定技术为研究目的,分析了标定算法对于前期图像处理的要求,给出了基于MATLAB 的简易 摄像机 标定方法。该方法借助于常用软件完成了以往摄像机的标定算法中的
2011-06-13 15:52:4039 matrox mil开发资料:CALIBRATION相机标定模块
2015-12-10 16:32:068 什么是摄相机标定?摄相机标定方法的分类?感兴趣的小伙伴们可以瞧一瞧。
2016-09-22 12:04:450 摄像机标定是机器视觉和摄像测量领域相对基础的工作,同时也是最复杂、困难的T作。摄像机标定的意义是得到立体空间中对象的几何信息,其中所使用的图像信息由双目摄像机所得。定后的双目摄像机得到的图像目标信息
2017-11-06 14:41:0530 在三维视觉测量系统中,对仪器参数的标定是首先需要解决的难题,而对投影仪的内外参数标定是三维结构光测量系统中不可或缺的一部分。就目前而言,投影仪的参数标定还存在着标定精度偏低、方法单一、可操作性差等
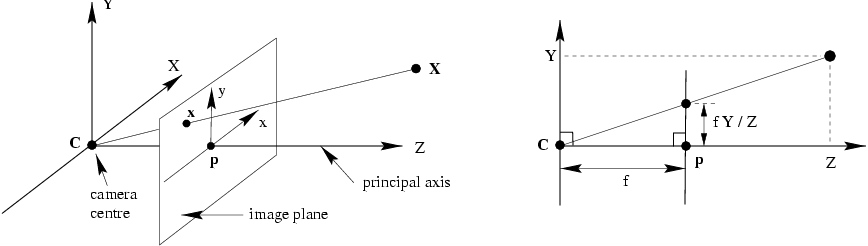
2017-11-06 15:30:2120 我们首先介绍下计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系。以及他们之间的关系。然后介绍如何使用张正友相机标定法标定相机。摄像机标定(Camera calibration)简单来说是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵的过程。
2017-12-04 16:56:3519087 
OpenCV sample目录下自带两个与相机标定的cpp文件即:calibration.cpp和calibration_artificial.cppcalibration.cpp 是通过用户输入
2017-12-04 17:23:263938 
针对基于C形臂的手术导航系统中相机标定这一关键技术中存在的过渡环节过多、参数求解过程复杂等问题,提出一种完全忽略相机模型的解决方法。该方法完全忽略相机模型,在映射参数求解过程中简化了过渡环节,使得
2017-12-14 15:31:305 针对张正友标定方法中相机内参数的求解可能陷入局部最优解的问题,考虑镜头的三阶径向畸变和二阶离心畸变,提出一种基于改进遗传算法的单目相机内参数优化标定方案。该方法可显著提高相机标定中内参数的精度,并能避免陷入局部最优。最后,实验验证了所提方案的有效性和可行性。
2018-01-05 16:11:492 相机标定可以说是计算机视觉/机器视觉的基础,但是初学者不易上手,本文将给读者整理一遍相机标定的逻辑,并在文末回答评论区提出的问题。分为以下内容:
2019-06-01 09:54:155154 
为了在精确测量中尽量消除误差,标定CCD相机在实际测量环境中的内部参数有着重要的意义。
2020-03-21 11:58:0522 这种情况的标定过程实际上和相机和机械手分离的标定方法是一样的,因为相机拍照时,机械手会运动到相机标定的时候的位置,然后相机拍照,得到目标的坐标,再控制机械手,所以简单的相机固定在末端的手眼系统很多都是采用这种方法,标定的过程和手眼分离系统的标定是可以相同对待的。
2020-07-11 09:57:506948 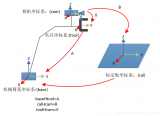
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,手眼标定等。
2020-08-28 11:42:4612629 
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。
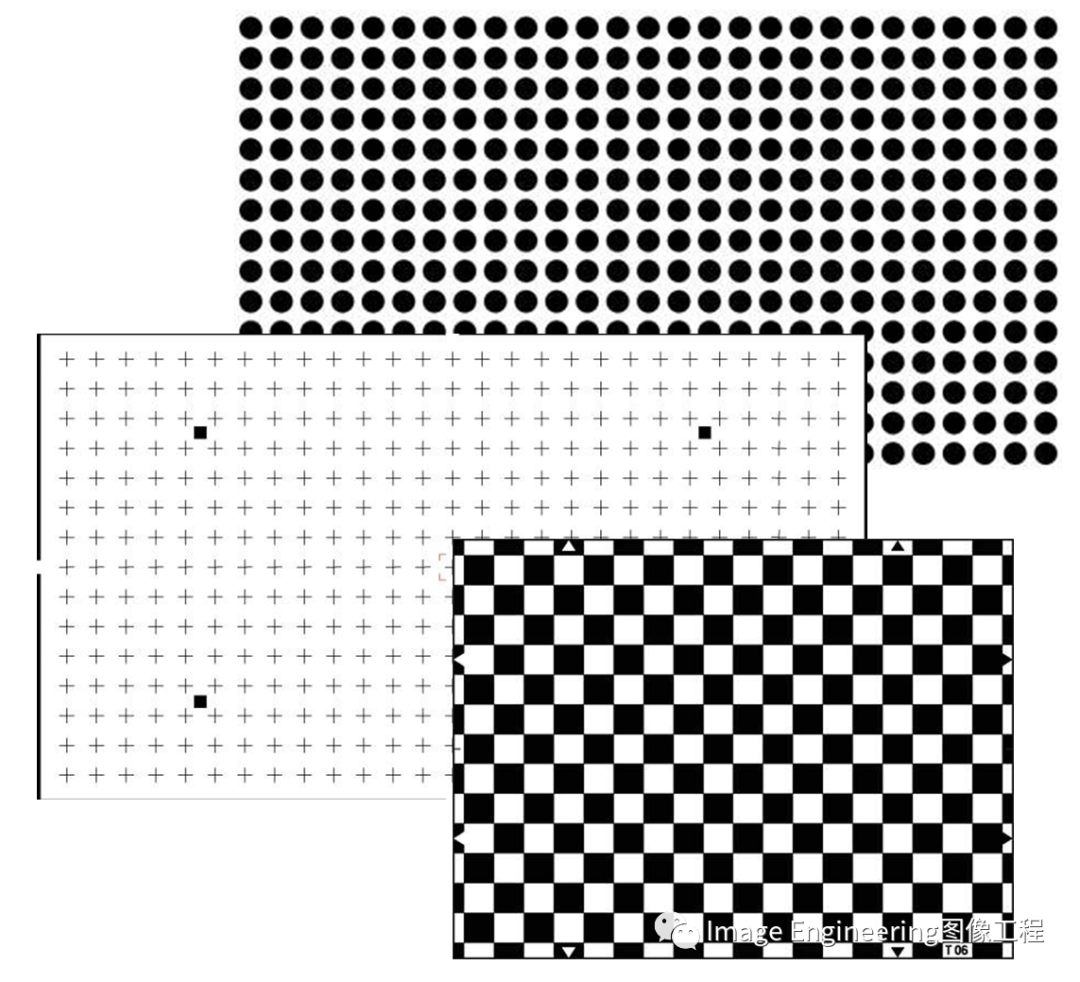
2020-08-28 15:18:0815427 采用张正友提出的基于2D平面棋盘格的摄像机标定方法,利用Matlab摄像头标定工具完成相机参数的标定。
2020-08-31 10:04:125849 
转自:微信公众号AI图像 创建标定数据模型 你可以用算子create_calib_data创建一个标定数据模型,指定相机和标定物体的数量。当用一个相机的时候,你也用一个单独的标定物体。 然后,你要做
2020-10-31 11:31:385419 
标定板特征成像不能出现明显的离焦距,出现离焦时可通过调整调整标定板的距离、光圈的大小和像距(对于定焦镜头,通常说的调焦就是指调整像距)。
2020-11-01 11:26:414845 张正友相机标定法是张正友教授1998年提出的单平面棋盘格的相机标定方法。传统标定法的标定板是需要三维的,需要非常精确,这很难制作,而张正友教授提出的方法介于传统标定法和自标定法之间,但克服了传统标定
2020-12-31 10:06:197407 
相机标定在计算机视觉领域中有着至关重要的作用。绝大多数相杋标定方法假设相机为针孔模型,且需要良好聚焦的图像来保证相机內外参估计的准确性。然而,这些条件会受到相机景深的影响。在薄透镜相机模型假设下,提
2021-04-21 15:05:5716 本文是本人的经验总结,不代表标准理论,有错误请指正; 主要讲解上下双相机定位贴合的原理和实现过程,包括各种标定、组合使用及具体的halcon源码实现,适用于的X、Y、Z三轴加一旋转轴系统,如模组
2021-05-08 10:05:1845148 
针对鱼眼镜头的高精度标定需求,提岀一种基于除法畸变模型的线性标定方法。通过除法模型将题转换为线性方程组求解问题相机畸变中心后对畸变方程矩阵进行解耦,分别求解相机内外参数和畸变系数实现鱼眼镜头的快速鲁棒标定。实验结果线性标定方法相方法在保证标定准性和可靠性计算效率提高了约10倍。
2021-05-19 11:39:058 相机固定不动, 上往下看引导机器人移动 机器人与视觉标定理论详解 1.相机非线性校正使用标定板做非线性校正2.相机与机器人做9点标定可以使用机器人扎9个点,或者机器人抓住工件摆放9个位置,得到9个
2021-05-27 14:15:534610 
针对传统标定方法参数考虑较少、标定精度不高的缺点,将群智能算法思想应用其中,并在现有的粒子群算法和灰狼算法基础上进行优化,取长补短,提出一种混合算法。首先,基于张正友方法获得标定的参数范围,在该
2021-05-31 11:09:515 在这里我们所说的双目标定是狭义的,讲解理论的时候仅指两台相机之间相互位置的标定,在代码实践的时候,我们才说完整的双目标定。
2021-07-04 11:04:1612628 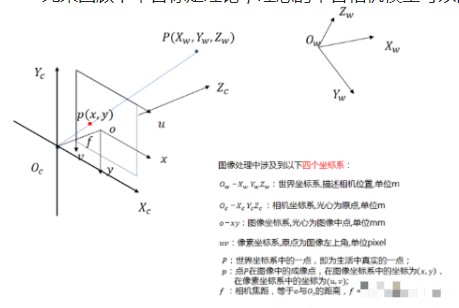
为什么要进行单相机标定? 广义:畸变矫正和一维和二维测量 畸变矫正: 在几何光学和阴极射线管(CRT)显示中。畸变是对直线投影的一种偏移。简单来说直线投影是场景内的一条直线投影到图片上也保持为一条
2021-09-02 09:45:384079 在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
2022-06-21 11:12:349143 在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,手眼标定等。
2022-08-18 15:54:378620 来自CMU Robotics Institute, 已知最早3D Laser与相机标定的工作(2005年),基于matlab的图形用户界面,进行激光雷达相机外参标定。
2022-11-10 14:59:264392 张正友相机标定法是张正友教授1998年提出的单平面棋盘格的相机标定方法。传统标定法的标定板是需要三维的,需要非常精确,这很难制作,而张正友教授提出的方法介于传统标定法和自标定法之间,但克服了传统标定
2022-11-14 10:14:405014 因为相机成像的模型比较复杂,所以依赖于一张图像来标定相机是不可靠的。但是我们可以把世界坐标固定在标定板上,通过转动和平移标定板来得到多幅不同的图像。
2022-11-22 10:34:056839 相机标定可以归纳为P−n−P(Perspective-n-Point)的问题,即已知三维物点坐标和对应的二维投影坐标,求解相机参数。由于镜头的畸变(径向和切向)带来非线性成像模型,一般求解方法分为两步:
2022-12-21 09:52:302249 在这里我们所说的双目标定是狭义的,讲解理论的时候仅指两台相机之间相互位置的标定,在代码实践的时候,我们才说完整的双目标定。
2022-12-28 17:17:243623 改变系统相对标定板的位姿,重复步骤34,拍摄>15组数据。使用拍摄的标定板图片进行相机标定,获得相机内外参,并保存每个标定板的角点位置信息。
2022-12-29 09:57:221268 相机畸变是影响相机标定精度的关键因素。由于畸变补偿不准确,传统的标定方法不能满足要求较高标定精度的测量系统的要求。本文提出了一种基于迭代畸变补偿算法的新型相机标定方法。相机的初始参数由全场相机像素
2023-01-05 10:18:322241 背景介绍 准确标定像机对于所有的机器/计算机视觉的成功应用都是非常重要的。然而,对于标定板,有不同的模式可供选择。为了方便进行选择,本文将解释每种方法的主要好处。 标定板的选择,有CharuCo
2023-01-17 15:13:591407 此方法采用一块大标定板来统一各个相机的坐标,每个大标定板中有若干小标定板,各个小标定板间的位置关系都是已知的,各个相机都能拍摄到一个小标定板。通过各个小标定板可以标定每个相机的内部参数和外部参数,每个相机的坐标都可以转换到各个小标定板的坐标系上,从而统一各个相机的坐标。
2023-03-13 10:06:373157 该数据集包括了不同仿真环境下生成的合成数据,以及不同场景下由各类真实相机采集到的图像和视频序列。每一个数据样本均提供了准确的标定结果、相机参数、或视觉线索。
2023-04-10 10:45:38664 机械手搭载双目相机,手眼标定。
2023-04-20 16:32:433344 常见的消费级RGB-D相机具有粗略的内参和外参校准数据的,通常无法满足许多机器人应用所需的精度要求。
2023-05-23 09:28:202596 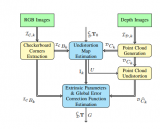
相机标定是通过输入带有标定patter的标定板来获得相机参数的一个过程。实际的光学成像是一套非常复杂的过程,从三维世界投影到相机中的二维图像。相机标定就是用抽象的数学模型来表示这个复杂的成像过程。
2023-06-01 14:36:461342 
obj_points、img_points_left和img_points_right分别是存储每个标定图片对应的物理坐标系下的角点坐标、左相机的像素坐标和右相机的像素坐标。这些变量同样在后续的相机标定和立体匹配中用到。
2023-06-08 16:28:533777 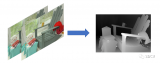
本文采用了一种从粗到精的方法,在车辆行驶在道路上时,通过因子图优化获取地面特征并优化相机到地面的标定参数,而无需使用任何特定的标定目标。
2023-06-20 09:36:221256 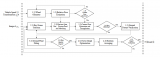
相机标定是计算机视觉最基础也是至关重要的一个问题,标定的精度够不够决定了以后的校正、去畸变、配准、计算三维坐标、恢复三维模型能否进一步做下去。
2023-06-26 09:51:301030 首先,课程介绍了双目相机标定的基础知识。我了解到双目相机是由两个相机组成的系统,通过同时拍摄目标物体的两个视角来获取三维信息。
2023-07-03 14:25:064396 
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,手眼标定等。
2023-07-03 15:45:155190 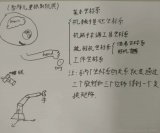
机械手搭载双目相机,手眼标定。
2023-07-11 11:18:213933 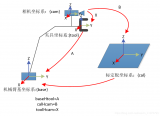
在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
2023-08-03 09:38:043496 
张正友标定方法是一种经典的相机标定方法,目前是最受欢迎的方法之一。该方法通过一种机器学习的方法,利用大量匹配的数据点像素坐标、世界坐标,基于极大似然估计拟合得到一个最优解。
2023-08-03 10:59:121974 
为了解决外参逐渐漂移的问题,提出了一种基于线的方法,可以在真实场景中实现激光雷达和相机的自动在线外参标定。首先,从点云和图像中提取和过滤线特征。然后,利用自适应优化方法提供精确的外部参数。然后在KITTI基准上用地面真值对其进行了评估。
2023-08-31 10:50:591898 
选中Export Camera Parameters按钮,将计算得到的相关参数导入到Matlab中;若要进行更精确的标定,可在标定时考虑畸变误差或采用双目相机标定方法。
2023-10-09 10:51:504298 
本文提出了一种自动在线激光雷达相机自标定方法CFNet。CFNet是全自动的,不需要特定的校准场景、校准目标和初始校准参数。我们定义一个校准流来表示初始投影点的位置与地面真值之间的偏差。
2023-10-10 11:44:432296 
这个逼近的过程就是「相机标定」,我们用简单的数学模型来表达复杂的成像过程,并且求出成像的反过程。标定之后的相机,可以进行三维场景的重建,即深度的感知,这是计算机视觉的一大分支。
2023-10-18 17:00:071636 
在选择标定板时,一个重要的考虑因素是它的物理尺寸。这最终关系到最终应用的测量视场(FOV)。这是因为相机需要聚焦在特定的距离上标定。改变焦距长度会轻微地影响对焦距离,这会影响之前的标定。即使是光圈的改变通常也会对标定的有效性产生负面影响,这就是为什么要避免改动它们。
2023-11-25 14:36:082092 
ROS功能包:livox_camera_lidar_calibration提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。 其中
2023-11-28 11:09:121375 
相机标定中的基本坐标系有:像素坐标系、图像坐标系、相机坐标系、世界坐标系,这些坐标系之间都有一定的转换关系,若这些转换关系已知,就可以得到世界坐标(棋盘上的点)和像素坐标之间的关系。
2023-12-19 10:42:494215 
工业相机标定的方法根据工业相机的数目可分为单目标定、双目标定Q以及多目标定。
2024-03-26 16:26:394228 
相机在从遥感、测绘、机器人技术到内窥镜等一系列应用中都是不可或缺的。这些应用通常需要了解相机中真实世界点和它们在图像中的几何关系。
2024-04-30 09:28:403118 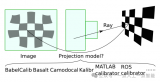
电子发烧友网站提供《基于DCC和张氏标定的相机镜头畸变校正.pdf》资料免费下载
2024-08-29 10:37:470 肇观电子近日宣布,凭借自研VPU芯片的异构计算架构与实时动态优化算法,成功实现了深度相机的全生命周期自标定技术,为全球首创。
2025-02-10 17:54:58954 1.文件运行 导入工程 双击运行桌面GraniStudio.exe。 通过引导界面导入相机标定例程,点击导入按钮。 打开相机标定例程所在路径,选中相机标定.gsp文件,点击打开,完成导入。 2.功能
2025-08-22 17:38:25836 
 电子发烧友App
电子发烧友App













 工商网监
工商网监
评论