以下是西门子S7-200PLC视频教程,全文共有36个视频。详细介绍了西门子S7-200PL的各种概念,基础的知识,及各案例的讲解。 1、S7-200西门子PLC视频教程第01讲--PLC概述 2、S7-200西门子PLC视频
2012-09-26 09:15:25 121376
121376 S7-200的自由通讯口0与下挂的4台变频进行数字化的信息传递,采用USS协议。通过USS协议,S7-200 PLC可以实时读取和设置变频调的相关参数。通讯速率可达187~kb/s,通信介质采用RS
2020-07-02 07:55:004320 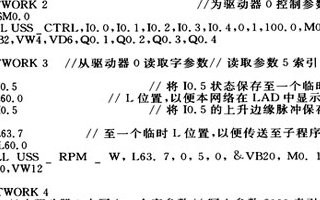
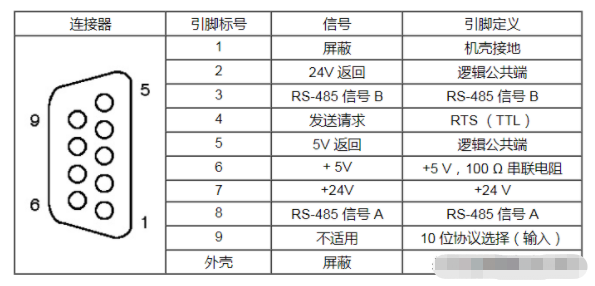
。CPU 集成的 RS485 通信端口的引脚分配如表1. S7-200 SMART CPU 集成 RS485 端口的引脚分配表所示。 表1. S7-200 SMART CPU 集成 RS485 端口的引脚分配 2.标准型 CPU 额外支持 SB CM01 信号板,该信号板
2023-08-14 10:52:355064 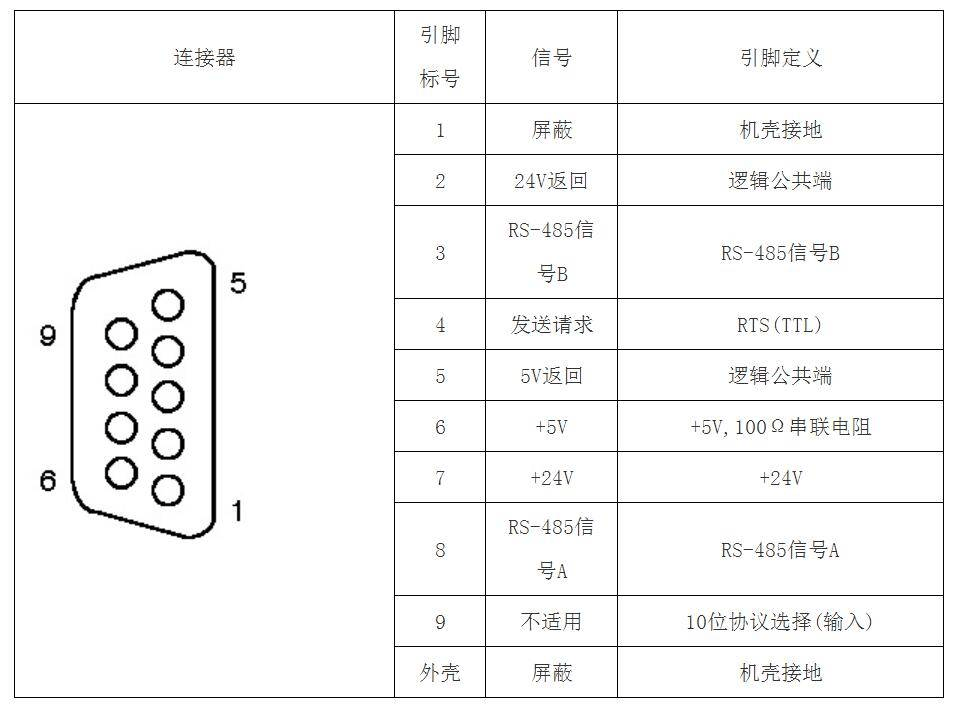
S7-200 Smart是西门子推出的一款紧凑型、高性能的PLC(可编程逻辑控制器),广泛应用于各种工业自动化领域。本教程将详细介绍S7-200 Smart的编程方法,包括硬件配置、软件安装、编程
2023-12-14 11:11:005358 有人做过 S7-200 PLC的MODBUS RTU从设备吗?触摸屏中的寄存器地址和S7-200的寄存器地址是怎么对应的,有点搞不清楚..
2015-07-04 20:26:58
我们来介绍下S7-200 Smart PLC的S7单边通信指令。
2021-01-06 06:12:42
S7-200是什么?S7-200系列的编程语言有哪几种?S7-200主机PLC的基本指令和功能指令分别有哪些?
2021-07-13 07:25:38
S7通信是S7系列PLC基于MPI、PROFIBUS、ETHERNET网络的一种优化的通信协议,主要用于S7-300/400PLC之间的通信。经过测试发现S7-1200与S7-200 SMART
2020-12-22 16:00:28
求助!!!请问现有一台S7-200,已经于触摸屏、另一台S7-200通过以太网通信(通过交换机),现在想继续与Labview上位机通信,想直接用以太网通信,请问硬件、软件应该如何配置?需要配置哪些东西?其实是两台互相通信的S7-200都要与Labview上位机通信上,求助!!!{:1:}
2014-04-11 15:32:33
请教大神PPI协议与S7-200 PLC是怎样进行通信的?
2021-09-24 08:44:25
触摸屏型号:TPC7022Ex软件版本:McgsPro3.3从机PLC:s7-200 Smart SR-60昆仑通态的触摸屏TPC7022Ex自带一个以太网口,支持和s7-200 smart进行通讯
2022-01-19 07:30:16
labview opc 与s7-200通信只能用PLC上面的串口吗?看到很多教程都只是用了PLC上的串口通信,不能用RJ45网线直接来通信给PLC赋值吗?
2017-08-19 11:46:12
介绍下如何在S7-1200和S7-200 Smart之间进行S7单边通信。
2021-01-15 06:00:38
,运动自如 S7-200 SMART PLC的CPU模块本体最多集成3路高速脉冲输出,频率高达100KHz,支持PWM/PO输出方式以及多种运动模式,可自由设置运动包络。配以方便易用的向导设置功能
2020-12-04 16:21:47
滨州市污水处理厂占地100万立方米。采用德国BIOLAK污水处理工艺,日处理水规模为10万立方米。项目使用四套S7-300和两套S7-200建成分布式控制系统,完成整个污水处理的控制、数据采集
2011-03-19 17:24:34 44
44 SIMATIC S7-200系列PLC是西门子公司生产的具有高性能价格比的微型可编程控制器,由于它具有控制能力强、体积小、抗干扰能力强等优点而得到广泛的应用。S7-200系列PLC提供了方便、简洁、
2011-03-30 21:36:3843 本例说明如何以自由协议实现计算机与S7-200的通信,计算机作为主站,可以实现对PLC从站各寄存器的读/写操作。
2011-05-18 11:40:403149 
《西门子S7-200 PLC应用100例》主要以西门子S7-200 PLC为主体,按基础知识、扩展提高和高级应用的结构体系,由浅入深、循序渐进地介绍了PLC基本逻辑控制、高级功能模块、PLC网络、人机
2013-09-17 10:02:49712 s7-200编程使用指南_PLC原理及应用。
2015-11-20 12:06:030 S7-200通过自由口控制Modbus变频器正负转_频率写入_等
2015-12-11 17:05:3416 程序案例 S7-200 PLC(下位机)程序
2016-01-12 15:44:5638 西门子200系列PLC S7-200的各种使用问题。
2016-04-28 14:57:0911 西门子S7-200 PLC仿真软件超详细使用教程西门子S7-200使用教程
2016-05-06 16:43:390 S7-200系列小型PLC (Micro PLC)可应用于各种自动化系统。紧凑的结构、低廉的成本以及功能强大的指令集使得S7--200 PLC成为各种小型控制任务理想的解决方案。S7-200产品的多样化以及基于Windows的编程工具,使您能够更加灵活地完成自动化任务。
2017-09-25 18:11:4528 它第三方设备进行通信的需求。 S7-200SMARTCPU 模块均集成1个RS485接口,可以与变频器、触摸屏等第方设备通信。如果需要额外的串口,可通过扩展CM01信号板来实现,信号板支持RS232/RS485 自由转换。 串口支持下列协议: 1、Modbus RTU 2、USS 3、自由口通信
2017-10-25 17:41:1721 S7-200和S7-300进行MPI通信S7-200 plc与S7-300 PLC之间采用MPI通讯方式时,S7-200 PLC中不需要编写任何与通讯有关的程序,只需要将要交换的数据整理到一个连续的V 存储区当中即可,而S7-300 PLC中需要在组织块OB1.
2017-12-04 18:33:5756797 
本文介绍了基于S7-200系列PLC的智能温度控制器系统。阐述了温度控制的实现方法。介绍了VB环境下实现上位机和PLC温度监控系统的串行通信的技术。
2018-02-26 19:08:0022123 
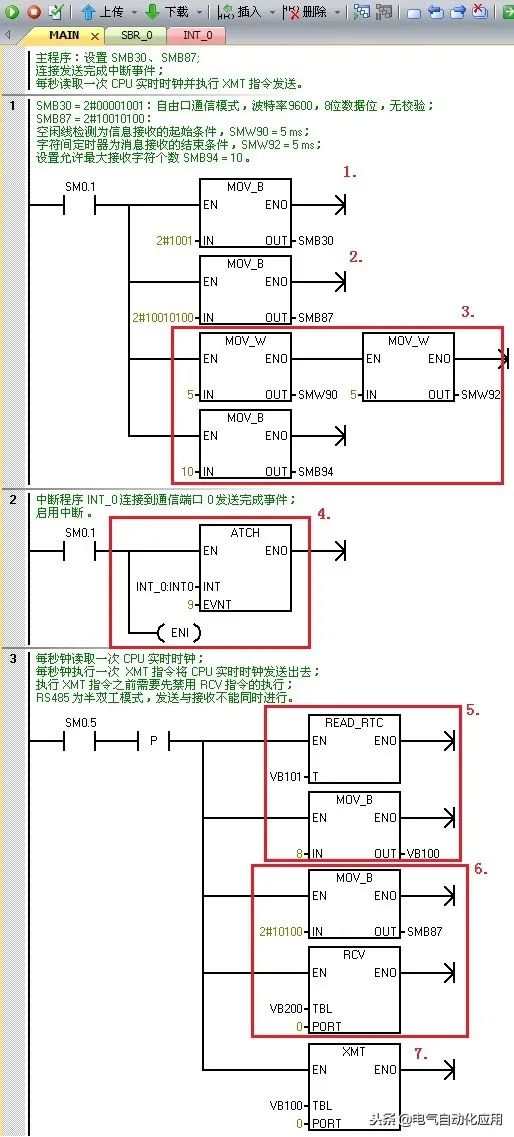
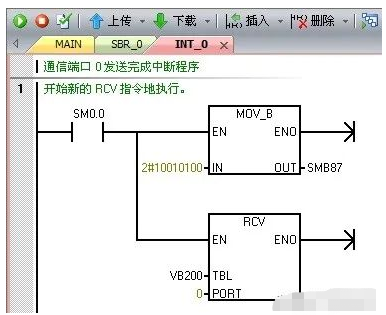
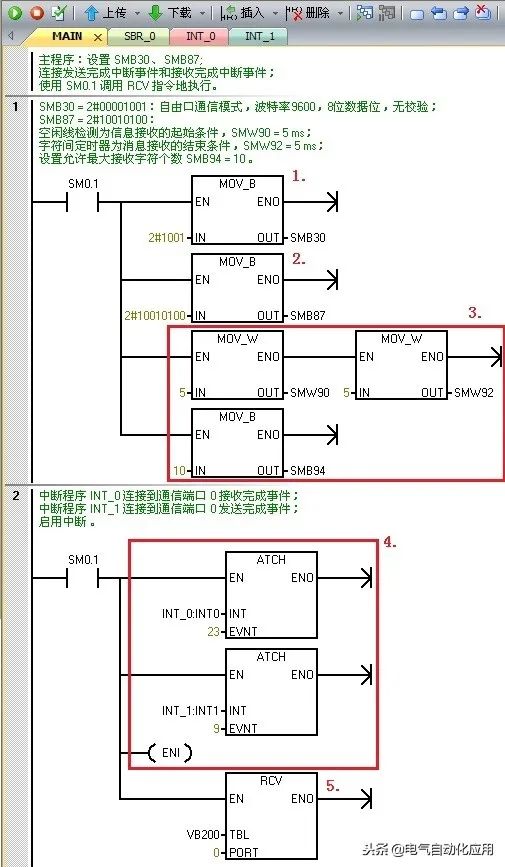
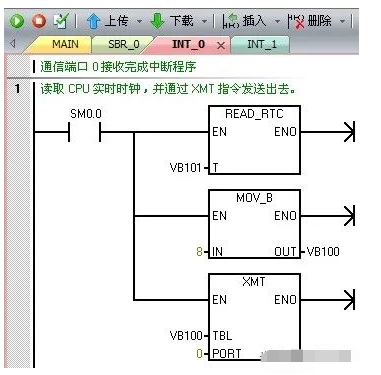
西门子S7-200CPU的通信口可以设置为自由口模式。选择自由口模式后,用户程序就可以完全控制通信端口的操作,通信协议也完全受用户程序控制。
2018-03-04 14:12:1410914 
本文首先介绍了S7-200系列PLC特点与基本硬件组成,其次介绍了S7-200系列PLC串口通信协议,最后介绍了S7-200系列PLC的串口针脚定义。
2018-05-22 14:15:1620949 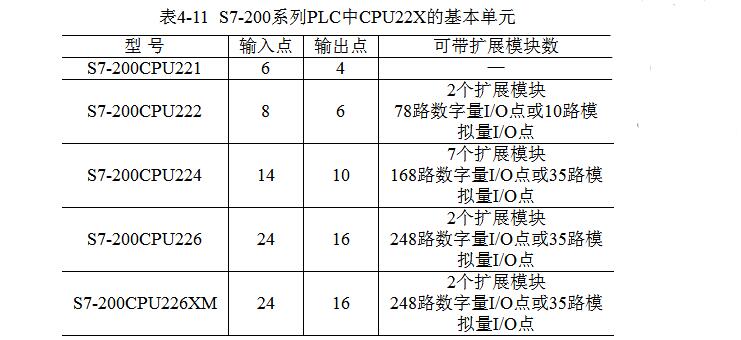
在实际的工程项目中,客户越来越多地选择 S7-200 smart系列PLC,并且在各个工程项目现场S7-200 smart都有良好的表现。在程序设计完成后,用户需要将程序下载到西门子PLC
2018-07-23 15:27:336086 S7-200 SMART 系列微型可编程逻辑控制器 (Micro PLC, Micro Programmable Logic Controller) 可以控制各种设备以满足您的自动化控制需要。
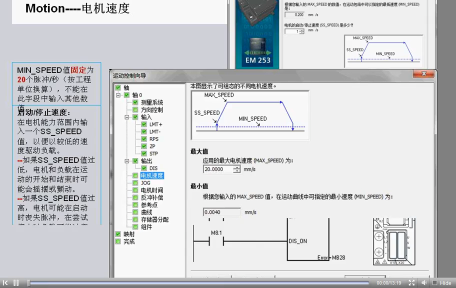
2018-08-21 08:00:0049 S7-200 SMART作为S7-200的升级款,在很多方面都进行了优化,使用更加的方便。其中运动控制的优化最为突出,S7-200运动控制频率低,编程比较麻烦,优化后提供了很完善的向导组态。
2018-10-04 14:22:0019039 
S7-200 CPU 具有自由口通信能力。自由口通信是一种基于RS485硬件基础上,允许应用程序控制S7- 200 CPU的通信端口、以实现一些自定义通信协议的通信方式。
2018-10-11 08:00:0052 S7-200 SMART 系列微型可编程逻辑控制器 (Micro PLC, Micro Programmable Logic Controller) 可以控制各种设备以满足您的自动化控制需要。
2018-10-08 08:00:00102 , S7-200 Smart 可通过标准的 Modbus 功能块完成发送伺服驱动器的控制指令,及读写参数。本文详细描述了 S-200 SMART PLC 通过 Modbus RTU 通信对 SINAMICS V90 进行速度控制的方法。
2018-10-08 08:00:0039 S7-200 SMART 系列包括许多微型可编程逻辑控制器 (Micro PLC, Micro Programmable Logic Controller),这些控制器可以控制各种自动化
2018-10-22 08:00:0051 本文档的主要内容详细介绍的是winCC modbus TCP方式与S7-200 SMART PLC通信视频教程免费下载。
2018-12-07 08:00:00101 S7-200 SMART数字量I/O接线图
2019-03-13 10:11:5324905 
----本例说明如何以自由协议实现计算机与S7-200的通信,计算机作为主站,可以实现对PLC从站各寄存器的读/写操作。
2019-04-17 08:38:152143 
该方案可适用于3台以上西门子PLC,S7-200 或S7-200Smart之间实现一主多从Modbus通讯协议的无线通讯。
2019-10-22 08:00:0014 S7-200 SMART 系列包括许多微型可编程逻辑控制器 (Micro PLC, Micro Programmable Logic Controller),这些控制器可以控制各种自动化
2020-12-14 08:00:0017 S7-200 SMART 系列包括许多微型可编程逻辑控制器 (Micro PLC, Micro Programmable Logic Controller),这些控制器可以控制各种自动化
2020-12-16 08:00:000 S7-200 CPU上的通信口Port0可以支持Modbus RTU协议,成为Modbus RTU从站。此功能是通过S7-200的自由口通信模式实现,因此可以通过无线数据电台等慢速通信设备传输。
2021-03-18 08:00:003 S7-200CPU上的通信口是与RS-485兼容的9针D型连接器,PLC还提供了实现 RS-485与 PC机上RS-232C相连接的PC/PPI电缆,利用它可以方便地实现S7-200系列PLC与PC之间的硬件连接。
2021-03-23 16:42:177379 西门子S7-200通过自由口和英威腾变频器通讯资料免费下载。
2021-04-23 09:32:4325 关于西门子PLC教案(S7-200)资料免费下载。
2021-04-29 14:50:04249 通过MPI建立OPC服务器与S7-200 PLC集成口的S7连接方式说明。
2021-05-07 09:24:585 S7-200系列PLC基本指令系统免费下载。
2021-05-07 10:30:3282 S7-200通过自由口控制Modbus变频器正负转说明。
2021-05-08 11:34:5935 BL102 PLC网关设备连接设备接线示意图如下: BL102 PLC网关的LAN口连接到西门子S7-200SMART的网口,COM口通过RS232转RS422线连接西门子S7-200SMART
2021-10-28 17:08:252799 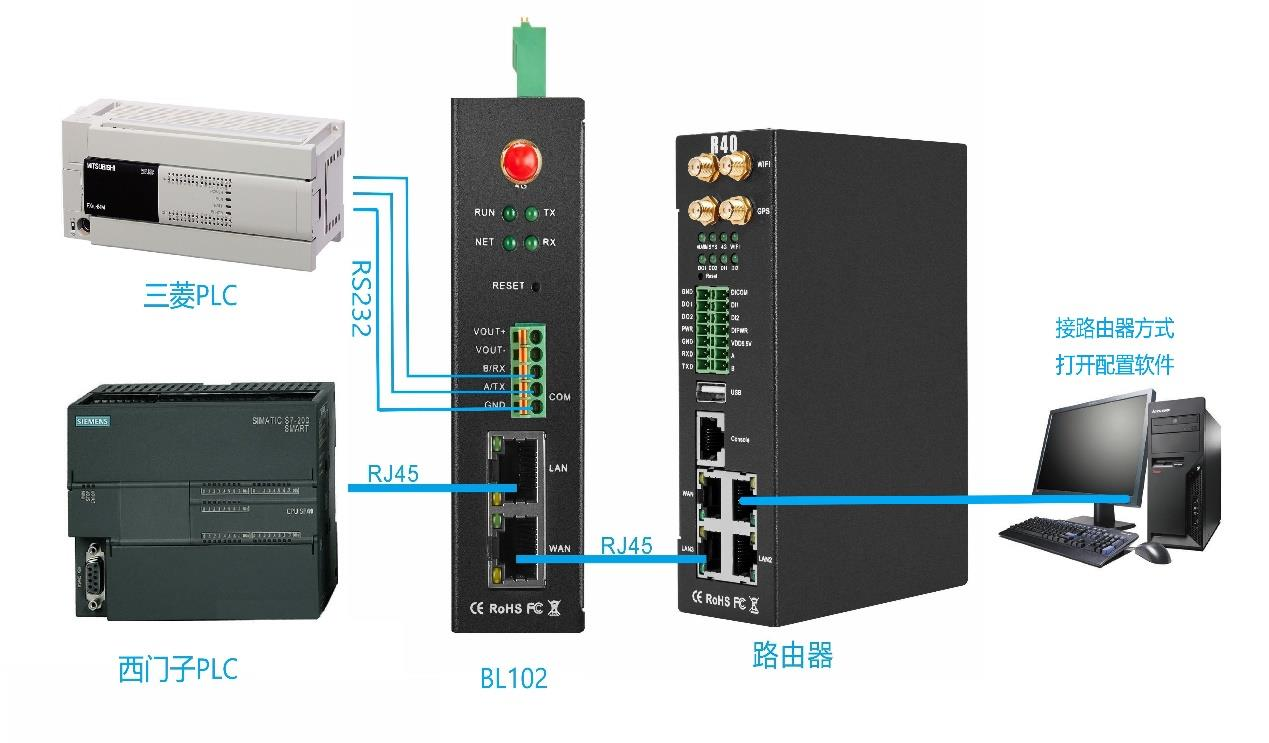
S7-200 SMART可编程控制器规格书
2021-11-25 16:46:419 简述S7-200 LABVIEW自由口通迅方法
2022-01-11 09:39:036 TCP 通信为面向连接的通信,需要双方都调用指令以建立连接及交换数据。S7-200 SMART 与 S7-300 CP 卡通过 TCP 通信,CP343-1 侧在网络视图中组态 TCP 连接,调用
2022-03-14 10:08:416535 S7-200 PLC基础知识培训课件
2022-06-16 14:21:0566 S7-200 SMART 使用的软件: STEP7-Micro/WIN SMART 提供了一个用户友好的环境,供用户开发、编辑和监视控制应用所需的逻辑。
2022-09-05 16:02:146214 本文档是用来描述如何使用 物通博联设备
快线以及远程实现以S7-200 SMART (以太
网)为例的设备远程维护功能的操作步骤
指导。
2022-09-16 11:15:3213 S7-1200与S7-200SMART S7 通讯的另外一种方法是S7-200SAMRT PLC做客服端,S7-1200做服务器。该方式需要S7-200SMART调用PUT/GET指令,S7-1200侧不需要编写通讯程序。
2022-11-17 20:16:1910519 主要内容:
S7-200 PLC串口通讯概览
S7-200 PLC自由口通讯基础
S7-200 PLC自由口通讯指令
S7-200 PLC自由口通讯常问问题
2023-01-03 16:46:0317524 S7-200 SMART CPU既可以通过本体集成的RS485端口或信号板连接支持PPI协议的西门子HMI设备,还可以通过本体集成的以太网口来连接支持S7协议的西门子HMI设备。
2023-01-06 12:04:455229 凭借西门子在华140年的电气工程领域的经验,S7-200 SMART PLC设计精良且性能可靠。
2023-01-29 10:38:206293 导入S7-200 Smart变量
2023-02-07 10:03:349100 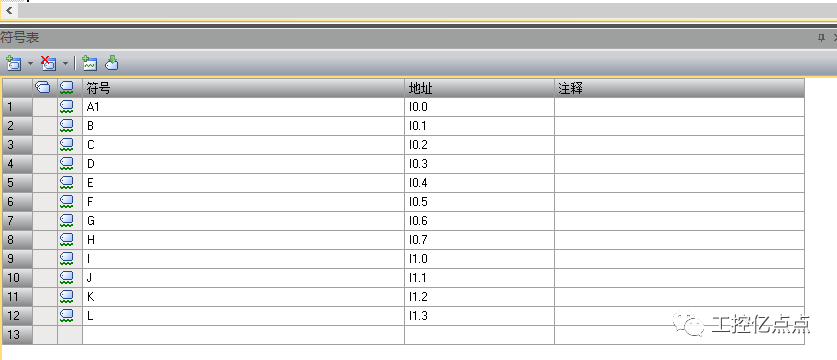
Profibus-DP通信接口接入Profibus现场总线网络,从而扩大PLC的使用范围。最后一种方式是自由口通信(Freeport)方式,由用户定义通信协议,实现PLC与外设的通信。以下采用自由口通信方式,实现PC与S7-200系列PLC通信。
2023-02-13 10:49:324549 通过输入页面URL来访问S7-200 SMART Web页面
2023-02-24 10:31:447482 S7-200 smart PLC在设置了最低权限的密码保护时,在不知道程序密码的情况下,是否可以对V区进行清空操作
2023-03-07 10:08:453473 门子S7-200/S7-200SMART/和S7-1200为例来说明: 第一种情况:西门子PLC作Modbus主站,Modbus地址和PLC手册里的地址一致,例如作主站的S7-200的MBUS_MSG
2023-03-16 15:16:2515257 S7-200 SMART CPU 可以通过以太网电缆与安装有STEP7 Micro/WIN SMART 的编程设备进行通信连接。
2023-03-29 09:31:175948 本方案是组态软件与西门子 S7-200 Smart 进行无线 MODBUS 通信的实现方法。此方案可以作为西门子 S7-200 Smart与组态软件的无线 MODBUS 通信实例。在本方案中采用了西门子PLC专用无线通讯终端DTD434M,作为实现无线通讯的硬件设备。
2023-04-04 09:46:412896 
西门子PLC S7-200 SMART是经济性好的一款西门子PLC产品,它的产品种类丰富,配件多样,软件界面友好,并可以和西门子触摸屏组合控制系统,是中小型自动化控制系统的解决方案。西门子PLC
2023-04-06 14:46:3812233 S7-200PLC或者S7-200 SMART PLC以及三菱FX 3U、5U等等,这些小型PLC相对于大型比较简单,易操作。
2023-04-12 08:40:003088 S7-200通过自由口控制Modbus变频器正负转 西门子S7-200通过自由口需要控制英威腾变频器的正负转 停止和故障复位,运行频率控制以及分二次读取运行速度等12条变频器信息。程序略微变动适应
2023-04-10 10:16:533 S7-200 SMART变量倒序的编程
2023-05-06 10:27:211692 
S7-200 SMART CPU 固件版本 V2.0 及其以上,本体集成的 PROFINET 通信接口支持 S7 通信,可以通过向导或使用 GET/PUT 指令两种方式实现,最多可以建立 16 个 S7 连接,其中包括:8 个客户端,8 个服务器。
2023-05-06 14:49:469016 
S7-200 SMART CPU 固件版本 V2.0 及其以上,本体集成的 PROFINET 通信接口支持 S7 通信
2023-05-06 14:49:551844 
今天就用几个项目实例,为大家介绍第一次使用S7-200 SMART PLC时具体步骤,帮大家迈开使用PLC的第一步。 项目控制要求: 1、按下启动按钮,电机启动 2、按下停止按钮,电机停止 项目
2023-05-22 14:23:424806 
所谓手自动勿扰S7-200 SMART PLC切换,是指在将PID回路从手动模式切换到自动模式,或者是自动模式切换的手动模式时,PID输出不会发生跳变,也就是不会产生任何波动。本文阐述内容主要以中的PID功能为实例。
2023-06-19 11:34:5916023 
从 S7-200 SMART V2.5 版本开始,S7-200 SMART 开始支持做 PROFINET IO 通信的智能设备。作为智能设备,S7-200 SMART可以和另外一个S7-200
2023-07-02 14:21:5913760 
【导读】分享一个西门子S7-200 SMART编程技巧。
2023-07-10 10:10:033584 
从 S7-200 SMART V2.5 版本开始,S7-200 SMART 开始支持做 PROFINET IO 通信的智能设备。从而,两个 S7-200 SMART 之间可以进行 PROFINET
2023-07-23 15:02:194176 
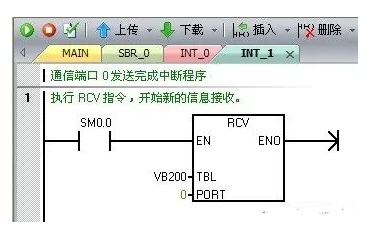
以前我们讲过关于自由口通讯的实例,今天我们讲一下自由口通讯配合中断的实例。
2023-07-25 10:44:385318 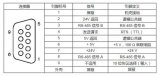
S7-200 SMART 系列包括许多微型可编程逻辑控制器 (Micro PLC, Micro Programmable Logic Controller),这些控制器可以控制各种自动化
2023-08-28 15:54:455 S7-200 SMART 在 CPU 硬件固件及编程软件版本均升级到 V2.2 之后才开始支持开放式通信。编程软件版本低于V2.2,无 Open User Communication 库指令;硬件固件低于 V2.2,硬件不支持开放式通信协议。
2023-10-29 17:25:432229 
西门子S7-200 SMART V2.8全新版本发布,功能大大增强,性价比进一步提升!200 SMART系列PLC作为一款小型高性价比的PLC,在泵站、一体化设备、成套设备等小型项目中应用十分广泛,其优越的性能表现及便捷的通信方式,深得业主及集成商的青睐。
2023-11-17 10:59:016460 
PLC西门子S7-200smart和S7-1200的区别? 西门子S7-200 smart和S7-1200是西门子公司推出的两个PLC产品系列,用于工业自动化控制系统。虽然它们都属于西门子的S7系列
2023-11-17 11:41:4115829 本方案以力控软件、2台西门子S7-200SMART plc和2台三菱FX5U plc为例,介绍力控与多台且不同品牌 PLC的ModbusTCP/IP协议无线以太网通信实现过程。
2024-01-06 10:51:232993 
S7-200smart为例,介绍S7-1500与多台 S7-200smart在Profinet协议下的自组网无线通信实现过程。在本方案中采用了西门子PLC无线通讯终端DTD418M,作为实现无线通讯的硬件设备。 用户
2024-01-24 08:58:422401 
S7-200 SMART CPU 集成的 RS485 通信端口(端口0)是与 RS485 兼容的9针 D 型连接器。CPU 集成的 RS485 通信端口的引脚分配如表1. S7-200 SMART CPU 集成 RS485 端口的引脚分配表所示。
2024-02-27 11:28:475871 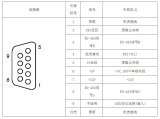
本文将详细介绍西门子S7-200 Smart PLC的加密设置方法,帮助用户更好地保护PLC程序的安全。
2024-03-27 10:14:3618278 
西门子S7-200 Smart PLC因其稳定性和易用性而广泛应用。通过使用S7协议,可以实现对PLC数据的高效读取和控制。本文将详细介绍如何使用S7协议读取西门子S7-200 Smart PLC的数据。
2024-07-11 11:55:3815086 
今天我们来聊聊西门子S7-200 SMART的“通信大法”!挺简单的,咱们来捋捋~ S7-200 SMART 是西门子公司推出的一款面向小型控制应用的PLC(可编程逻辑控制器)。目前
2024-08-27 17:31:394329 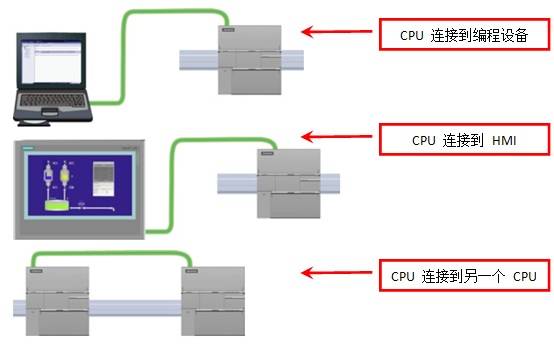
电子发烧友网站提供《如何用 S7-200 实现 Modbus 通信?.pdf》资料免费下载
2024-09-14 10:22:082 测试设备与参数 西门子PLC型号:S7-200Smart × 2台 上位机:WinCC7.4 × 1台 达泰欧美系PLC无线通讯终端——DTD418MB × 3块 主从关系:1主2从 通讯接口
2025-02-25 10:06:042352 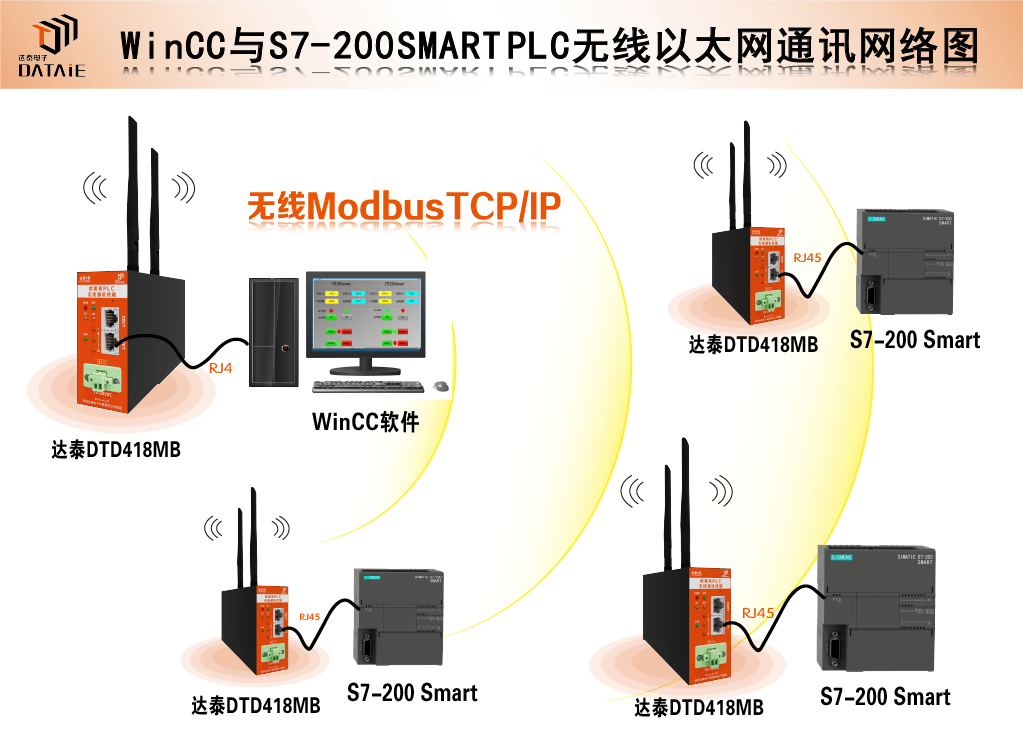
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论