 电子发烧友App
电子发烧友App


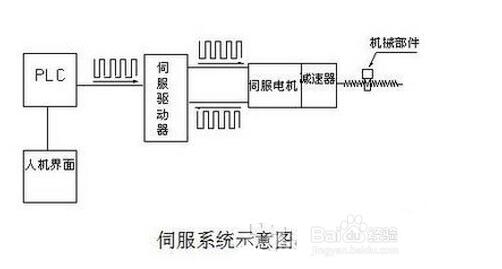
伺服系统是用来精确地跟随或复现某个过程的反馈控制系统,主要任务是按控制命令的要求,使驱动装置输出的力矩、速度和位置控制非常灵活方便。伺服系统最初用于国防军工,后来逐渐推广到国民经济的许多部门,如自动机床、无线跟踪控制等。
伺服系统应用广泛,工控人要了解下面这五个注意事项!
一、三环的增益调整
1. 电流环:
电流环的输入是速度环 PID 调节后的输出,称为“电流环给定”。
电流环的给定和“电流环的反馈”值进行比较后的差值,在电流环内做 PID 调节输出给电机,“电流环的输出”就是电机的每相的相电流。
2. 速度环:
速度环的输入是位置环 PID 调节后的输出及位置设定的前馈值,称为“速度设定”。
“速度设定”和“速度环反馈”值进行比较后的差值在速度环做PID 调节后输出,就是“电流环的给定”,速度环是编码器反馈后的值经过“速度运算器”得到的。
3. 位置环:
位置环的输入就是外部的脉冲,位置环的反馈也来自于编码编码器安装于伺服电机尾部,和电流环没有任何联系,采样来自于电机的转动而不是电机电流。
二、PID 控制的概念
PID 是控制系统中的重要参数,指控制方式,输出与输入之间的响应方式,英文字母比例(P)、积分(I)、微分(D)。
PID 控制把收集到的数据和一个参考值进行比较,然后把这个差别用于计算新的输入值, 这个新的输入值的目的是可以让系统的数据达到或者保持在参考值。和其他简单的控制运算不同,PID 控制可以根据历史数据和差别的出现率来调整输入值, 这样可以使系统更加准确,更加稳定。
三、增益调整的原则及注意事项
一些品牌的伺服都有自动增益功能,但也有一些伺服需要手工调整,需注意以下几点:
位置环是调整静态增益的,速度环是调整动态增益的。
位置环增益,提高位置响应的速度,也就是说找到位置的快慢,增益越高达到目标的时间越短,不是速度的关系,闭环系统在最后定位结束的地方是个高速震荡的过程,在目标值附近快速震荡,最后找到目标。增益高,这个震荡结束就快,这个是伺服电机的重要性能指标之一。
四、伺服电机的控制模式选择
1. 转矩控制 :
转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如 10V 对应 5Nm 的话,当外部模拟量设定为 5V 时电机轴输出为 2.5Nm:如果电机轴负载低于 2.5Nm 时电机正转,外部负载等于 2.5Nm 时电机不转,大于 2.5Nm 时电机反转。
2. 位置控制 :
位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。
3. 速度模式 :
通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环 PID 控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。
位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加整个系统的定位精度。
4. 全闭环控制模式 :
全闭环控制是相对于半闭环控制而言的。
半闭环是指数控系统或 PLC发出速脉冲指令,伺服接受指令后执行,在这个过程中,伺服本身的编码器进行位置反馈给伺服,伺服自己进行偏差修正,伺服本身误差可避免,但是机械误差无法避免。
而全闭环是指伺服接受上位控制器发出速度可控的脉冲指令,把伺服电机、运动控制器、位置传感器三者有机的结合在一起。
五、PID三环对伺服控制的影响
伺服电机一般为三个环控制,所谓三环就是 3 个闭环负反馈PID调节系统。从内向外分别为 电流环、速度环、位置环 。
1. 电流环:最内的 PID 环就是电流环,此环完全在伺服驱动器内部进行,通过霍尔装置检
2. 速度环:通过检测的电机编码器的信号来进行负反馈 PID 调节,它的环内 PID 输出直接就是电流环的设定,所以速度环控制时就包含了速度环和电流环。
3. 位置环:它是最外环,可以在驱动器和电机编码器间构建也可以在外部控制器和电机编码器或最终负载间构建。
什么是马克拉伯?
MookLab是一个机器视觉应用开放社区,致力于帮助用户以最低的成本、门槛构建视觉系统。具体为:
1)提供免费软件:平台提供免费的视觉软件,专业团队进行免费软件服务支持。
2)深度学习平台:为零算法基础的开发者提供定制高精度AI模型的服务,训练生成的模型文件可导入SGVision AI模块进行离线检测。
3)筛选整合优质视觉硬件品牌:如整合优质的视觉硬件(如相机、镜头、光源)等品,为用户提供低成本的视觉配件。
4)提供项目应用支持:提供技术服务,吸纳各地区的集成商,为部分视觉应用能力较弱的用户提供就近、行业针对性的应用支持服务。
5)提供专业的人才培养机制:面向行业入门者以及高校教育推出的机器视觉实验平台+软件套装,以及相应的教育支持服务。
审核编辑:黄飞












 工商网监
工商网监
评论