对于在室外环境工作的移动机器人通常使用惯导/卫星组合导航方式。惯性导航系统[1]具有完全自主、抗干扰强、隐蔽能力好和输出参数全面等优点,但它的鲁棒性极低,误差会不断随时间累积发散。卫星导航系统具有
2015-10-07 10:03:00 3535
3535 
本文包含MSP430F149最小系统图与MSP430F149芯片封装库一、简介MSP430系列单片机是美国德州仪器(TI)1996年开始推向市场的一种16位超低功耗、具有精简指令集(RISC)的混合
2021-11-18 06:27:01
msp430F149的学习资料MSP430F149中文资料.pdf (513.71 KB )msp430总结.docx (18.82 KB )msp430最小系统板v1.2y.pdf (83.13 KB )MSP430寄存器手册.pdf (752.92 KB )
2019-03-06 05:57:52
求msp430f149通过IIC总线驱动24c64的程序
2013-05-13 21:54:41
刚刚接触到msp430系列,要画原理图,不知道msp430f149、msp430f149ipm及msp430f149ipag之间有什么区别。
2014-04-13 15:37:06
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
我觉得现在是时候讨论一些更有趣的话题,今天的话题是介绍工业机器人、协作机器人和移动机器人。我想每个人都知道机器人是什么。机器人是可怕的大型机器,通常需要关在笼子中,其功能安全要求一般涉及门联锁装置
2018-10-30 11:33:11
移动机器人有没有推荐的MCU,萌新求大佬帮助
2020-11-03 11:41:09
移动机器人常用传感器
2012-08-20 22:33:40
构建机器人 | 制作移动机器人 | 构建第一个机器人 | 机器人电子 | 机器人控制器 | 机器人传感器 | 交互机器人选择运动系统让我们快速浏览一下用于移动机器人的三种主要运动系统。 如果比较表中
2021-09-01 08:12:28
移动机器人运动控制系统设计及控制算法研究
2012-08-20 15:54:16
初次使用 NI MyRIO控制器开发四轮全向移动机器人,由四个全向轮和直流电机与增量式编码器和NI 9001控制器组成,安装了红外距离和光电传感器。驱动板由官方提供的H桥驱动板。NI 9001由
2016-08-21 12:20:22
有使用labview控制移动机器人的大佬嘛,在下需要一些myrio资料的讲解,希望各位伸出援助之手,拉小弟一把,感激不尽。
2019-03-21 15:12:09
我们主控芯片使用msp430f149控制18个舵机,如果让机器人完成前进后退左转右转动作,18个舵机应该是怎么样的角度才可以,三角步态。。。
2014-03-12 15:21:02
量,保证移动机器人按照规划路径顺利地到达目标位置。而开环控制则是根据预先设定的控制量进行运动控制,不考虑机器人当前状态的影响。开环控制相对简单,但精度较低,常用于一些简单的任务。
然而由于自主导航系统
2023-06-28 09:36:32
通过视觉传感器(或组合式的色标传感器),检测事先铺设在地面的色带与移动机器人(AGV/AMR)的相对位置,从而使小车沿既定路线(色带)行驶。
**色带导航优点:**铺设容易改路径,成本低
2023-06-28 09:52:41
一种小型移动机器人的控制系统研究
2012-08-20 15:53:10
的实践经验,来系统的梳理一下什么是移动机器人软硬件系统问题。文中涉及到的开源项目网站地址如下:开源项目网站Handsfree
2021-08-06 06:13:07
对于在室外环境工作的移动机器人通常使用惯导/卫星组合导航方式。惯性导航系统具有完全自主、抗干扰强、隐蔽能力好和输出参数全面等优点,但它的鲁棒性极低,误差会不断随时间累积发散。卫星导航系统具有
2019-07-11 07:08:49
研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期短,能够实现真正的SOPC系统。
2019-10-22 07:35:19
自主式移动机器人系统是指根据指令任务及环境信息进行自主路径规划,并且在任务执行过程中不断采集局部环境信息,做出决策,从而实现安全行驶并准确到达目标地点的智能系统。本文以LPC2119为控制核心,介绍
2020-05-11 06:39:04
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
2023-09-20 06:24:09
,要么巨简陋--编码器线数低于40线,根本不能满足ROS移动机器人的需要。为了锻炼自己的动手能力(这个借口看起来比较积极,能掩盖没钱的尴尬...),准备从零打造一款ROS移动机器人地盘。扫地机轮组减速比大致是50左右,电机编码器15-20线,轮子转一周大概是1000个脉冲,测量精度够用。通过L298N
2022-01-14 08:36:54
,导航技术,计算机技术,人工智能等多个领域,因而对移动机器人的控制部分提出很高的要求,特别是视觉传感器的出现,要求控制系统不仅存储量大,而且处理速度快等。以往基于PLC和单片机控制的移动机器人就不能很好
2020-11-23 15:08:52
移动机器人是机器人的重要研究领域,人们很早就开始移动机器人的研究。世界上第一台真正意义上的移动机器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它装备了
2020-05-14 08:15:00
作为一个技术宅,我对机器人和单片机很感兴趣。在这里我把自己做过的一款履带式移动机器人的资料分享给大家。欢迎大家吐槽!同时也希望对做机器人的同学有帮助。 该机器人采用STM32F103RCT6为主
2017-07-27 18:28:18
差速移动机器人轨迹跟踪控制方法一、引言二·、基础准备1.去除GPS数据中的坏点2.经纬度与平面坐标系转换3.差速移动机器人数学建模三、基于PID的差分移动机器人轨迹跟踪方法1、控制律设计2、航向角
2021-09-01 08:41:30
cO 1 为摄像机的焦距f 。 图1 移动机器人视觉系统的坐标关系 不考虑透镜畸变, 则由透视投影成像模型为: 式中, Z′= [u, v ]T 为目标特征点P 在图像坐标系的二维
2019-06-01 08:00:00
商用移动机器人潜力巨大,能够为设备和服务行业培养广阔的市场。根据近期研究判断,预计单单是无人机市场在2022年之前就有机会飙升至18十亿美元以上。地面上的移动机器人则能用于众多领域(工业、商业和家用
2019-08-13 07:29:10
的合作。公司致力于各类移动机器人产品的研发与销售,如餐饮机器人,巡检机器人,安防机器人等各类移动机器人。公司致力于为工厂以及物流仓储行业提供无人化、智能化的设备,如各种不同应用场景的AGV,包括
2017-06-10 14:24:17
什么是移动机器人软硬件系统问题?移动机器人软硬件系统有哪些问题呢?
2021-11-11 06:07:42
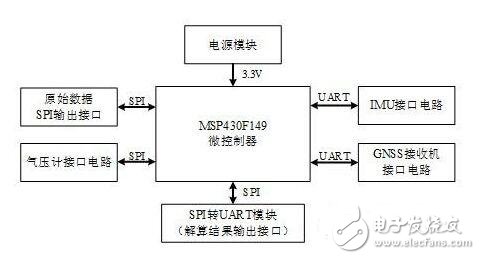
怎么设计一种室外移动机器人组合导航定位系统?如何实现室外移动机器人组合导航定位系统的硬件设计?如何实现室外移动机器人组合导航定位系统的软件设计?
2021-04-19 10:50:33
、餐饮服务行业已经应用到了机器人。不过目前,移动机器人都是使用高质量的机载可充电蓄电池组来给自身供电,但是一般只能维持几个小时,一旦电能耗尽,必须采用人工干预的方式来给机器人充电。如果采用人工充电,那么
2016-01-20 09:39:06
系统,开发了一套二轮差速驱动转向移动机器人电机驱动系统,完成了系统各部件的整体装配和调试。试验结果表明,该设计方案可行、系统运行稳定可靠、成本低廉、所用元件易于购置,具有较好的实用的价值和应用前景。
纯
2025-06-11 14:30:14
。在许多情况下,机器人必须能够自主工作,利用导航系统来监视并控制它从一个位置移到另一个位置。管理位置和运动时的精度是实现有用、可靠的自主工作的关键。MEMS(微机电系统)陀螺仪可提供反馈检测机制,对优化
2014-09-02 17:15:20
msp430F149应用电路原理图
2008-04-11 10:46:28 415
415 MRC5000是一款全自主知识产品的移动机器人领域专业控制器产品。MRC5000具有“可靠、稳定、灵活、易用“等特点,内置多种导航算法,支持各种国内外常用型号导航传感器,具有防火墙功能和无线路由功能
2021-11-22 16:14:01
开发了一种能在未知环境下实现快速障碍检测与障碍回避的基于同时发射声纳环移动机器人导航系统。为了消除由于同时发射造成的串话干扰,提出了一种基于神经网络模式识别
2008-11-11 17:39:1424 介绍了智能仪表的定义和工作原理。研究了16位混合信号处理器MSP430F149的体系结构,提出了一种基于MSP430F149的智能仪表的设计方案,具体阐述了该智能仪表的前向通道、后向通道、
2009-03-16 17:47:2171 导航与定位是移动机器人应用中的一个瓶颈技术,针对移动机器人所处的不确定环境和自身状态的不可测性,本文系统综述了导航中相关关键技术,并提出了若干应用需求中的技
2009-05-27 13:37:2428 本文介绍了以MSP430F149 单片机为核心设计的列车完整性监测系统,详细阐述了该系统的硬件结构、软件设计、抗干扰措施和应用前景等。关键词:MSP430F149 单片机;列车完整性
2009-06-18 10:29:327 对国内外移动机器人智能导航研究中采用的几种导航方式进行了对比, 对近几年发展起来的并已在移动机器人导航研究领域中得到应用的相关技术进行了论述, 对自主式移动机器人导
2009-07-10 08:21:4022 通过对TI公司16位微处理器MSP430F149的性能结构的分析, 结合嵌入式操作系统μC/OS-Ⅱ的可移植性给出了该操作系统在微处理器MSP430F149上移植的方法,并测试内核自身的运行状况和建立
2009-08-25 08:57:4522 MRC3100系列AMR移动机器人控制器,适用潜伏顶升式、协作(复合)式、辊筒式等差速底盘类型移动机器人,内置激光导航及二维码导航算法,支持差速底盘运动模型。MRC3100系列自带丰富的I/O资源
2023-07-11 10:12:02
FRC5000系列叉式移动机器人控制器,适用各类常见的叉式移动机器人,内置激光导航算法,支持单舵轮、双舵轮底盘运动模型。FRC5000系列自带丰富的I/O资源和各种通讯接口,支持CANopen
2023-07-11 10:26:45
基于MSP430F149单片机的光电编码器位置检测系统设计
Abstract:Aiming at requirement of the position detection in iron and steel industry,a photoelectrical encoder position dete
2009-10-30 08:30:063177 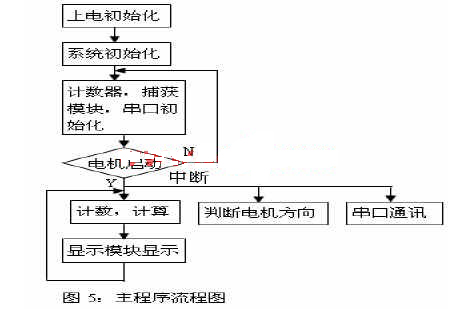
MSP430F149的无线环境监测传感器系统设计策略
微处理器模块
C
2010-04-20 15:50:18920 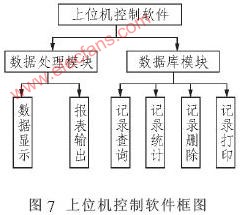
智能移动机器人是一种在复杂的环境下工作的具有自规划、自组织、自适应能力的机器人。导航算法的研究是智能机器人研究领域的一个热点话题。智能导航的目的就是在没有人干预下
2011-04-08 17:53:05175 本设计利用MSP430F149自带的串口通过RS485进行远距离实时传输,上位机可将实时数据进行曲线绘制、数据保存等处理。
2011-09-19 09:59:202765 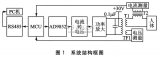
MSP430F149各模块实验程序MSP430F149各模块实验程序
2015-12-03 16:17:1827 msp430f149使用资料,包含msp430f149原理图,msp430f149使用例程,扩展功能等。
2015-12-07 10:52:51292 移动机器人导航与定位技术!资料来源网络,如有侵权,敬请原谅!
2015-12-25 09:49:2713 基于MSP430F149单片机的恒流电子负载系统设计
2016-01-04 18:11:3128 MSP430F149核心板+扩展底板应用电路图以及用户手册,分分钟学会MSP430F149。
2016-01-22 14:32:2860 基于MSP430F149单片机的语音无线传输系统
2016-02-17 09:49:1221 基于MSP430F149的无线环境监测传感器系统设计
2016-02-17 09:56:4329 MSP430F149超低功耗单片机,英文原版数据手册。
2016-04-29 17:57:0926 MSP430F149通过USART连接SIM900A实现TCP/IP通讯。
2016-05-18 11:44:2425 移动机器人导航所采用的主要的技术,红外,地磁等等。
2016-05-23 16:29:075 MSP430F149的流水灯例程,使用定时中断和外部晶振,感兴趣的小伙伴们可以看看。
2016-07-26 11:37:532 MSP430F149程序,包括DAC输出和ADC采样。
2016-07-29 17:08:2113 基于TC35i和MSP430F149的无线数据采集系统,感兴趣的可以看看。
2016-08-19 16:51:1112 MSP430F149电路原理图,下来看看。
2016-08-23 18:29:2678 电子设计研发部分的研发人员常用资料,MSP430F149开发板例程下载
2016-11-03 14:53:170 MSP430F149文档及程序
2016-12-13 22:47:1018 基于MSP430F149的NPRQ检测系统_陈真诚
2017-03-19 19:08:351 文章以MSP430系列单片机为核心,提出了一种轮式移动机器人的软硬件设计方案,阐述了其通过传感器网络来进行避障、遍历等自主控制,并实现机器人与PC机间无线控制的方法。
2017-09-07 14:08:042 移动机器人分类 移动机器人从工作环境来分0可分为室内移动机器人和室外移动机器人1按移动方式来分!轮式移动机器人。步行移动机器人。蛇形机器人。履带式移动机器人。爬行机器人等1按控制体系结构来分!功能式
2017-09-16 09:18:5913 MSP430F149是TI公司推出的MSP430F14X系列单片机中目前的最高端产品。
2017-09-21 09:34:4318 基于ARM的移动机器人组合导航系统设计与实现
2017-09-25 13:38:055 基于MSP430的自主式移动机器人设计与实现
2017-10-13 09:01:498 MSP430F149跑ADC和USB好用的代码
2018-05-02 17:48:019 本应用笔记讨论了TLC2552和TLV2542 ADC的特点。还介绍了MSP430F149到TLC2552 ADC和MSP430F149到TLV2542 ADC的SPI接口代码示例。
2018-05-25 15:00:0237 等功能。在自主式移动机器人的研究中,机器人的精确定位一直是研究的热点问题。而光电导航系统就是机器人的一个“眼睛”,在其运动中起着非常重要的作用。
2018-12-31 11:04:005711 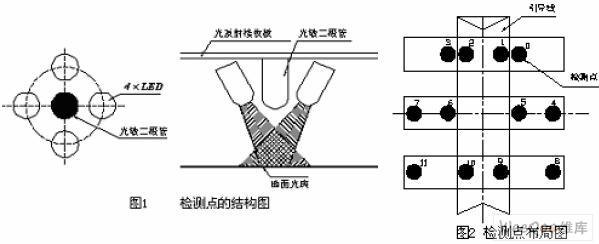
移动机器人要实现在未知和不确定环境下运行,必须具备自动导航和避障功能。在移动机器人的导航系统中,传感器起着举足轻重的作用。视觉、激光、红外、超声传感器等都在实际系统中得到了广泛的应用。其中,超声波
2019-10-18 07:49:006557 
实现移动机器人安全高效的运行,离不开导航系统和转向驱动系统的通力合作。移动机器人在运动行驶过程中需要用转向驱动装置来控制它的运动方式。
2019-08-20 09:31:482799 伴随移动机器人(AGV)产业快速发展,激光导航移动机器人以其自主、灵活、高效、精准的优势成为市场上最受欢迎的移动机器人产品,并在工业制造、商用服务等诸多领域广泛应用。
2019-12-05 10:27:201823 相较于传统的磁条导航、二维码导航移动机器人,激光导航移动机器人以其自主灵活的优势越来越受到用户的青睐,并在工业制造、电子制造、电商仓储、医疗教育、食品烟草、安防巡检等各行各业得到了广泛应用。
2020-01-27 17:25:002681 相较于传统的磁条导航、二维码导航移动机器人,激光导航移动机器人以其自主灵活的优势越来越受到用户的青睐。
2020-03-21 09:55:113266 针对目前全自主移动机器人尚难实现的问题,基于人机结合的思想研制了由操作者、人机交互平台和移动机器人组成的“人一机一环境”一体化移动机器人导航系统·介绍了诙系统的结构组成,阐述了系统导航策珞,详细分析
2020-10-12 08:00:000 相较于传统的磁条导航、二维码导航移动机器人,激光导航移动机器人以其自主灵活的优势越来越受到用户的青睐,并在工业制造、电子制造、电商仓储、医疗教育、食品烟草、安防巡检等各行各业得到了广泛应用。对于磁条导
2020-12-26 09:45:311728 传感器的集成,但是要想最大限度降低导航制作成本,只能实现机器人底盘部件的模块化运作。移动机器人底盘承载着机器人定位、导航、移动、避障等多种功能。
2021-06-16 17:12:314163 基于msp430f149单片机的可分离的多形态舞蹈机器人设计资料
2021-10-25 18:06:430 在室内外移动机器人产业浪潮的推动下,移动机器人市场持续升温,行业分工作业将机器人分为机器人行业应用端与模块化机器人底盘 。
2022-12-20 14:32:232404 MSP430F149平衡小车原理图
2023-03-15 11:39:3813 移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。
2023-06-20 17:09:403118 
在室内外移动机器人产业浪潮的推动下,移动机器人市场持续升温,行业分工作业将机器人分为机器人行业应用端与模块化机器人底盘 。
模块化移动机器人底盘承载了机器人自身的定位,导航及避障功能,实现机器人实现智能行走,在模块化移动机器人中目前主要有哪几种机器人结构呢?
2022-12-14 10:58:572729 
、灵活化、柔性化、低成本、高效率、安全作业等特性。1车型介绍叉式移动机器人(AGV/AMR)具备定位、导航和一定的自主决策能力,其主要由控制系统、驱动模块、工作模
2023-06-05 15:34:522407 
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。基于整个智能制造的发展,移动机器人
2023-06-21 17:29:162492 
对于在室外环境工作的移动机器人通常使用惯导/卫星组合导航方式。惯性导航系统[1]具有完全自主、抗干扰强、隐蔽能力好和输出参数全面等优点,但它的鲁棒性极低,误差会不断随时间累积发散。卫星导航系统具有
2023-07-23 17:17:051763 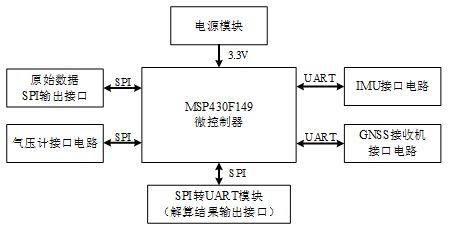
电子发烧友网站提供《基于MSP430F149的无线遥控教鞭的设计.pdf》资料免费下载
2023-10-10 11:00:240 电子发烧友网站提供《基于GPS的自主移动机器人导航定位系统的实现.pdf》资料免费下载
2023-10-25 11:23:402 电子发烧友网站提供《基于双MSP430F149单片机的车辆监控系统车载移动终端设计.pdf》资料免费下载
2023-11-17 11:53:361
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论