坐标系:为确定机器人的位置和姿态而在机器人或空间上进行的位置指标系统。
2017-02-19 12:03:09 32354
32354 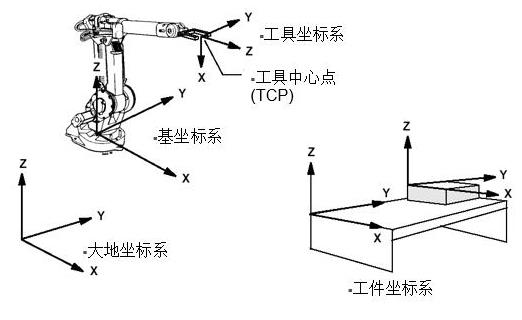
`如何建立一个具有特定角度的坐标系,并让矩形ROI随坐标系旋转?`
2017-09-18 13:41:57
首先坐标系转换的变换矩阵(没有坐标系矩阵变换的概念可先百度)如图:
2019-06-20 18:34:32
、抓取、装配、入库等训练,2、工业机器人与视觉实训平台包含六自由度工业机器人、智能视觉检测系统、PLC控制系
2021-07-01 06:38:35
工业机器人中的伺服驱动的目的是什么?工业机器人中的关节内部驱动结构是怎样构成的?
2021-10-11 08:37:43
工业机器人一般由主构架(手臂)、手腕、驱动系统、测量系统、控制器及传感器等组成。 1图是工业机器人的典型结构。机器人手臂具有3个自由度(运动坐标轴),机器人作业空间由手臂运动范围决定。手腕是机器人
2015-01-19 10:36:12
)对给定机械臂,己知各关节角矢量g(f)=[gl(t),g2(t),......gn(i)]',其中n为自由度。求末端操作器相对于参考坐标系的位置和姿态,称之为运动学正问题。在机器人示教过程中。机器人
2017-12-15 10:25:19
labview 视觉机器人抓取工件 CCD相机的二维坐标系的建立?希望分享,谢谢
2017-08-18 20:53:37
可以在如下图所示位置找到。注意:在首次安装的时候需要将电脑连接网络,否则可能导致插件安装失败。 二、机器人底盘参考坐标系X轴方向为机器人前进方向,Z轴方向为垂直向上。X轴Y轴的零点为底盘的水平
2019-01-24 14:42:36
机器人的电机传动控制坐标系是怎样确定的,是基于什么控制原理,学习机器人的控制理论有哪些比较经典的书籍,求大神指导?
2013-06-10 17:03:57
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
ABB机器人发生不一致路径精确性故障维修原因:ABB机器人维修此种故障的原因可能有以下几种可能性:①ABB机器人没有进行正确的校准;②没有正确定义机器人的TCP;③机器人的平行杠出现损坏;④伺服电机
2020-09-09 16:06:33
首先关注一下电机学的相关知识,我们都知道ABC三相在坐标系中的顺序是,A相超前于B相120度,B相超前于C相120度,所以ABC按顺时针排列。同时三相电流的公式也说明了这个问题。还可以这么理解这上面讲的很好。但是在电机学中,ABC相轴线的排列不是那么回事,如图所...
2021-08-27 06:32:32
1. A、B、C三相坐标系中PMSM数学模型定子电压方程:结论:在A、B、C坐标系下,可以看出电压方程和磁链方程比较复杂,磁链的数值随永磁同步电机定转子之间的相对位置随时间而变化,而电机运动方程
2021-08-27 07:59:14
在使用浩辰CAD制图软件绘制图纸的过程中,怎么才能在不旋转图形、不改变其坐标值的情况下,让图形与视图正交显示呢?接下来给大家分享一下CAD图形与世界坐标系不正交的解决办法吧!CAD图形与世界坐标系
2019-12-16 15:37:17
浩辰CAD制图软件为绘图空间提供了一个绝对的坐标系,并称之为世界坐标系,这个坐标系存在于任何一个图形之中,而且不可更改。相对于世界坐标系,用户可根据需要创建无限多的CAD坐标系,这些坐标系称为用户
2020-09-23 10:28:54
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在
2019-07-15 07:48:36
LabVIEW怎样确定控件在显示器坐标系中的位置想知道VI中控件的位置,但是当使用该控件的位置属性时,与之相关联的是LabVIEW原点,而不是显示器原点。该如何确定该控件在显示器坐标系中的位置。解答
2022-04-12 20:44:07
LabVIEW确定控件在显示器坐标系中的位置想知道一个VI中控件的位置,但是当使用该控件的位置属性时,与之相关联的是LabVIEW原点,而不是显示器原点。该如何确定该控件在显示器坐标系中的位置
2022-05-23 21:19:27
MATLAB建立和控制图形窗口和坐标系命令建立和控制图形窗口 Figure 建立图形 Gcf 获取当前图形的句柄 Clf 清除当前图形 Close 关闭图形 建立和控制坐标系
2009-09-22 16:00:57
当前的调速系统带来了一系列的问题:占据了比较大的有效空间,使系统编程复杂。因此无位置传感器控制系统的研究变得越发的重要。2.PMSM的坐标系和数学模型永磁同步电机在定子三相(ABC)静止坐标系下的电压方...
2021-08-27 06:01:37
Pmsm在旋转坐标系的数学模型坐标变换dq轴电压方程整体模型电压计算模块dq轴磁链计算d,q轴电流转距计算转速计算仿真结果因为转动惯量较小,转速迅速跟随同步转速顺利启动。A相电流与电压波形...
2021-08-27 07:56:09
WGS84/GCJ02/BD09各坐标系怎么进行转换?
2021-11-08 08:15:40
WGS84、GCJ02、BD09各坐标系之间的转换坐标解释WGS84坐标系:即地球坐标系,国际上通用的坐标系。设备一般包含GPS芯片或者北斗芯片获取的经纬度为WGS84地理坐标系,谷歌地图采用
2021-07-30 06:39:32
请教各位大神如何在Labview中建立CCD相机的二维坐标系。谢谢!
2016-10-08 11:40:19
labwindows/cvi中,如何在canvas控件上画一个扇形的极坐标系,可以显示其上一点的极坐标?
2018-08-10 11:02:28
新的坐标系,然后根据此坐标系使用测量工具测量,达到跟踪测量的功能。1.首先进行图像预处理后使用模板匹配工具2.根据模板匹配建立新的坐标系3.使用此坐标系进行边的测量(此处出现问题)但是在过程中发现一个很奇怪
2014-10-14 19:23:55
的移植、HMI、CAN-Bus、API、MFC坐标系的标定五大功能。最后完成一款可以对工业机器人进行示教的示教器研制。实验室配有机器人控制器和机器人本体,因此本课题的实验条件充足。
2015-07-23 22:14:55
三相坐标系对应的电流是 Ia = sin(x)Ib = sin(x-120)Ic = sin(x+120)Clark变换得出Iα = Ia Iβ = (Ia + 2Ib)/根号3Park变化 Id
2017-02-27 15:28:51
机器人按臂部的运动形式分为四种。直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。工业机器人按执行机构运动
2015-01-19 10:58:38
介绍坐标系以及它们之间的变换关系,数学的意味还是很浓的。讲了那么多的公式和规律,它们要怎么用在机器人上呢?这篇文章将介绍坐标系和机器人之间的纽带即连杆坐标系。完成这篇文章的介绍之后我们就可以利用一些
2021-09-01 06:17:14
` 本帖最后由 12345bzq 于 2015-1-8 15:44 编辑
卡酷教育机器人精简版套件试用体验本次赠送项目:卡酷机器人精简版套件赠送数量:5套赠送对象:DIY机器人爱好者赠送方式
2015-01-08 14:40:02
工业机器人的四大特征是哪些?工业机器人是由哪些部分组成的?工业机器人是怎样进行划分的?
2021-10-11 09:10:17
`华南机器人应用培训中心拥有各种设备,开展各种不同的机器人培训班。打造各种工业现场常见的机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业机器人培训对外招生。 一、认识机器人技术:工业
2015-09-02 14:03:18
1.同步旋转坐标系下的数学模型1.1 dq坐标系下的定子电压方程1.2 dq坐标系下的定子磁链方程1.3 定子电压方程变换式及等效电路由上述两个方程,可以得到定子电压方程的新等式:电压等效电路如下
2021-09-03 07:20:48
选择圆柱坐标系后,圆柱坐标系中的ρ、ψ、Z与直角坐标系中的X、Y、Z是如何对应的?
2017-03-02 21:38:18
本系统搭建了基于单目视觉的SCARA机器人硬件平台,并使用圆形供料盘混合投放多种颜色的保险片,利用CCD摄像机获取保险片的图像信息,从图像中提取其轮廓形状及坐标信息,并利用摄像机参数标定,通过坐标变换得到保险片在机器人坐标系的空间坐标,然后控制SCARA机器人夹爪对保险片工件进行精确定位和抓取。
2019-06-19 06:30:00
永磁同步电机最大的优势在于其简单的结构,低廉的生产成本以及稳定的运行状态。本文的主要研究工作基于相坐标系,建立永磁同步发电机定子绕组匝间短路、转子磁场损失的数学模型,通过这些MATLAB程序,对系统
2021-08-27 06:15:52
0引言锁相环广泛应用于如电能质量分析、电力系统保护、并网变换器以及无功补偿等现代工业控制领域。已有研究人员对单dq坐标系三相锁相环算法进行了分析,通过对电压矢量的坐标变换及PI控制,实现理想电压工况
2021-09-06 09:24:01
的、多用途的操作机。其工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。多轴机器人又称单轴机械手,工业机械臂,电缸等,是以XYZ直角坐标系统为基本数学模型,以伺服电机、步进电机为驱动的单轴机械臂为
2020-07-29 06:57:04
如何使labview中xy图的坐标系与栅格坐标系一致
2015-01-25 21:44:26
;关闭”暂停建图“ ·控制机器人继续扫图 —>保存完善后的地图文件。 总的来说,就是: 加载完毕后,机器人会重置到坐标轴原点,机器人的实际角度与地图坐标系一般都会有一定偏差
2019-01-28 17:27:40
问题如下:我在阅读发烧友的四轴代码时,发现四轴是用的北东地坐标系,我现在有两个疑问:1)使用东北天坐标系和北东地坐标系,重力向量都是[0 0 1]吗?还是分别是+/-1? 2)当使用北东地坐标系时,我看到四轴代码将传感器z轴方向反了一下,这是因为传感器的正方向与北东地坐标系不一致所导致的吗?
2019-07-16 04:35:48
各位大神们如何在labview中建立坐标系啊(对一张图片),感谢各位大神的回复
2017-05-03 10:04:29
如果我的坐标系跟原坐标系不一致,(例如我现在的X轴是原来Y轴的反方向,现在的Y轴是原来的X轴,Z轴不变)更改姿态程序的什么地方,我用的是战舰板的MPU6050软件
2019-07-22 03:05:16
当mpu6050初始放置的时候是倾斜的,如何计算才能把坐标系转换成水平的坐标系?转换后的效果是保证倾角不变,水平转动mpu,出来的数据是水平转动的。我用当前四元数与初始的四元数做差,得到的四元数坐标系还是与mpu坐标系相同,不知道怎么计算才能把坐标系转换成水平的?
2019-07-31 22:19:38
的特征点也能够获取目标的位置等信息。此方法须保证该组特征点在不同坐标系下的位置关系一致, 而对于一般的双目视觉系统, 坐标的计算误差往往会破坏这种关系。 采用在机器人上安装车载摄像机这种局部视觉定位
2019-06-01 08:00:00
我发现了一些关于相机坐标系(点坐标)的不同描述下面的图片是我在这个页面中认为是相机坐标的点坐标的解释RealSense SDK 2.0中的投影·IntelRealSense
2018-10-19 14:15:53
提供了标准接口。桁架机器人也叫龙门式机器人,属于直角坐标机器人。是一种建立在直角X,Y,Z[1] 三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。桁架式机器人能够搬运
2020-11-30 09:44:15
永磁同步电机dq坐标系中转矩公式中系数3/2的由来
2021-08-27 06:51:20
永磁同步电机的数学模型的建立有哪几种坐标系?为什么坐标系转换可以解耦?
2021-10-11 08:45:04
何ADC都会决定系统的总精度。换言之,系统精度不可能高于转 换器的最低有效位(LSB)大小。为了表明这一点,让我们来看一个 简短的ADC不精确性指南。
首先,注意到由于ADC不是理想的,并且分辨率
2023-12-15 07:40:13
本帖最后由 一只耳朵怪 于 2018-6-11 17:02 编辑
请问电机控制系统中直角坐标系与极坐标系的优势比较。TI是否有现成的demo例程。
2018-06-11 02:58:19
本文将解决电压方程在静止坐标系与运动坐标系转换问题。本文将呈现的转换关系是电压方程由静止坐标系转换至运动坐标系,反之同理可证。
2021-08-27 07:17:03
怎么区分不同坐标系下SVPWM调制波波形
2018-12-01 22:03:40
IMU数据融合中,根据加速度计得到的Roll和Pitch及磁力计的三轴分量转换为东北天坐标系的公式我一直不明白是怎么来的,希望各位大佬能给我解释下,找了好久都没找到,最好附上相应公式和相关资料。
2019-06-20 02:21:07
如题,陀螺仪测得的角频率是导航参考坐标系的还是仪器自身载体坐标系的?
2019-05-31 01:24:09
谁知道这两个坐标系之间该怎么变换啊,显示平坐标系是通过摄像头捕捉画面,再在显示屏上显示的。如果要坐标变换的话,这两个坐标系该怎么变啊。
2016-05-30 18:43:21
知识体系分解细化,对ABB工业机器人知识要点做了针对性解析,并配以详细的操作步骤。全书以工业机器人组成为切入点,系统地介绍了ABB工业机器人的主要技术参数、手动操纵方法、坐标系定义流程、I/O配置过程
2018-10-29 17:03:22
什么是工业机器人TCP? 为了描述一个刚体在空间的位姿,需在物体上固连一个坐标系,然后确定该坐标系位姿(原点位置和三个坐标轴姿态),即需要6个DOF来完整描述该刚体的位姿[1]。对于工业机器人,需要
2017-09-19 15:07:24 13
13 针对借助激光跟踪仪标定机器人所涉及的坐标系统一问题,对基于空间几何法拟合建立的基坐标系与机器人理论基坐标系的转换关系进行了研究,提出了一种基于对偶四元数法的机器人基坐标系标定方法。利用指数积公式推导
2018-03-07 10:43:522 在我们工业机器人定义中,有四类坐标系,他们分别是轴坐标系、世界坐标系、工具坐标系、基座坐标系。
2018-10-05 17:43:0025784 随着社会进步、科技发展,工业机器人的应用也越来越普遍。由于其种类众多、运动轴与坐标系也很多,确定起来容易出错
2018-11-11 09:37:359391 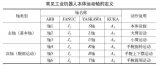
任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动空间所必须的基本坐标系(面对机器人前后:X轴 ,左右:Y轴, 上下:Z轴)。
2019-05-14 09:56:5921434 
大地坐标系:大地坐标系是以大地作为参考的直角坐标系。在多个机器人联动的和带有外轴的机器人会用到,90%的大地坐标系与基坐标系是重合的。但是在以下两种情况大地坐标系与基坐标系不重合:
2020-05-09 15:49:434003 坐标机器人又称单轴机械手,工业机械臂,电缸等,是以XYZ直角坐标系统为基本数学模型,以伺服电机、步进电机为驱动的单轴机械臂为基本工作单元,以滚珠丝杆、同步皮带为常用的传动方式所架构起来的机器人系统,可以完成在XYZ三维坐标系中任意一点的到达和遵循可控的运动轨迹。
2020-08-24 09:50:331951 在工业机器人的操作、编程和调试时坐标系具有重要的意义。在机器人控制系统中定义了下列坐标系: ROBROOT 机器人足部坐标系 固定位于机器人足部。 是机器人的原点。 是世界坐标系的参照
2020-12-23 17:41:204551 是一个可自由定义、用户定制的坐标系说明基坐标在世界坐标系中的位置。用于测量工件和装置。位置在congfig.dat
2022-06-02 15:53:123583 在基准测量时,用户分配给工作面或工件一个笛卡尔坐标系 (BASE 坐标系)。BASE 坐标系的原点为用户指定的一个点。
在需要时,可以让测量点的坐标和姿态以增量和角度显示 (以法兰坐标系为基准)。为此按下测量点。然后通过返回返回到上一个视图。
2023-04-19 09:54:553190 一般都会定义机器人第一轴的旋转轴为基坐标系Z轴,旋转中心即是坐标系原点,X和Y的方向是的电机零点确定,所以只要你不更换电机的零点和机械结构,单个机器人里这个基坐标系是永远不会变的!
2023-05-11 15:57:441025 
在编程操作过程中,为了确定机器人的空间位置以及姿态的变化,需要建立合适的工具和用户坐标系。工具坐标系用于确定每个工具中心点(TCP)的位置和工具姿势。
2023-05-12 14:43:421113 
我们在检测工件时,需要正确的装夹检测工件,使工件有足够的检验空间和恒温时间,坐标系的建立就是为后续的测量奠定基础,建立错误的坐标系直接导致测量尺寸的误差建立正确的参考方向即坐标系是十分重要的。
2023-02-17 10:24:174143 
激光跟踪仪的机器坐标系是不固定的。激光跟踪仪是采用球坐标系测量系统,在测量的时候,是需要操作者手拿测量靶球,激光跟踪仪射出一道激光主动跟踪测量靶球,在操作者将靶球接触待测工件表面时,激光跟踪仪精确
2023-04-06 17:01:37732 
相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个坐标系之间的装换关系。
2023-07-03 10:30:114076 
焊接机器人是一种自动化设备,用于进行焊接操作。为了确保焊接过程的准确性和效率,焊接机器人需要在三维空间中进行定位和控制。这涉及到使用不同的坐标系,以便机器人能够精确地执行任务。本文将重点讨论
2023-10-18 15:17:21423 
在编程操作过程中,为了确定机器人的空间位置以及姿态的变化,需要建立合适的工具和用户坐标系。工具坐标系用于确定每个工具中心点(TCP)的位置和工具姿势。
2023-11-07 11:44:28230 
其中r是毫米像素比、(mm/pixel)就是一个毫米有几个像素,theta为两个坐标系之间的夹角,(x0,y0)为图像坐标原点到机械坐标原点的距离。
2023-11-12 09:42:18581 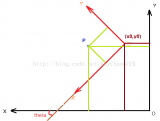
大地坐标系:大地坐标系是以大地作为参考的直角坐标系。在多个机器人联动的和带有外轴的机器人会用到,90%的大地坐标系与基坐标系是重合的。但是在以下两种情况大地坐标系与基坐标系不重合。
2023-11-13 11:24:46676 
精密减速器是工业机器人的核心部件,占工业机器人本体成本的30%以上,是影响工业机器人精确性、稳定性等性能指标的重要元件。
2023-11-14 17:48:24744 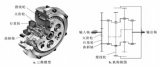
坐标系是我们非常熟悉的一个概念,也是机器人学中的重要基础,在一个完整的机器人系统中,会存在很多坐标系,这些坐标系之间的位置关系该如何管理? ROS给我们提供了一个坐标系的管理神器——TF。 机器人
2023-11-22 17:20:23463 
Launch文件解析 先来看下刚才运行的launch文件,里边启动了四个节点,分别是: 小海龟仿真器 海龟1的坐标系广播 海龟2的坐标系广播 海龟跟随控制 其中,两个坐标系的广播复用
2023-11-22 17:44:42268
 电子发烧友App
电子发烧友App











 工商网监
工商网监
评论