 电子发烧友App
电子发烧友App


Q:远心镜头为何价格高,有何优点?
A: 远心镜头的设计是采Telecentric原理,低失真、无视角误差,较适合工业上量测应用,所以价位较一般CCTV镜头高。远心镜头另有同轴镜头设计,提供不同工作距离,不同放大倍率供选择。
Q: 远心镜头为何低倍率镜头价格反而高?
A: 因为Telecentric镜头为了要减少失真,让平行光进入,所以镜头设计必须比被照体大,所以低倍率镜头通常口径都很大,所需的镜片材料成本较高,所以价格较高。
Q: 同轴光镜头打同轴光时,中间亮度较亮旁边整暗,是何原因?如何补救?
A: 因为同轴光镜头的投射光线集中于中心5~6㎜左右,如果看的范围较大,边缘附近光线较暗,这是低倍率同轴光镜头常有的现象。可以外加环形光源来补足光线不够地方。
Q: 远心镜头可否搭配CCTV用的2倍镜使用?
A: 可以,但是影像质量变差,所需光强度更强,不建议使用。
Q: 远心镜头规格上,标示镜头分解能(解析力)是代表什么意思?
A: 镜头解析力的定义是镜头能看清楚最小物体边缘的能力,如果低于此分解能,就无法看清楚了。须另外找解析力更高的镜头,如高倍显微物镜。
Q: 远心镜头景深为何不能很长?
A: 远心镜头设计时即考虑到景深、倍率、光圈、工作距离等参数取得最佳点,所以景深均为固定的数值,如要增长景深,而牺牲别的参数,会影响镜头质量。
Q: 如果要看到1μm的物体可用何种镜头?
A: 要看到小于1μm以下物体,必须用高倍显微物镜,但工作距离变得很小(约7㎜),景深变得很浅了。
Q: 用远心镜头所放大的影像到底是多少倍?
A: 影像实总际放大倍率是等于镜头光学倍率×Monitor放大倍率,Monitor放大倍率是Monitor对角线除上CCD Sensor对角线(1/3〞CCD Sensor投射到14吋Monitor是59.3倍)。
Q: 远心镜头除了C-mount之外,可否提供其它mount选择?
A: 除了C-mount之外,还有直径φ17㎜及直径φ12㎜二种mount供选择,这些mount是针对笔型CCD专用的镜头。
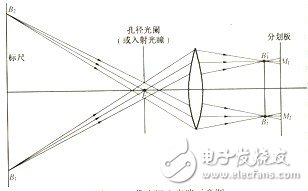
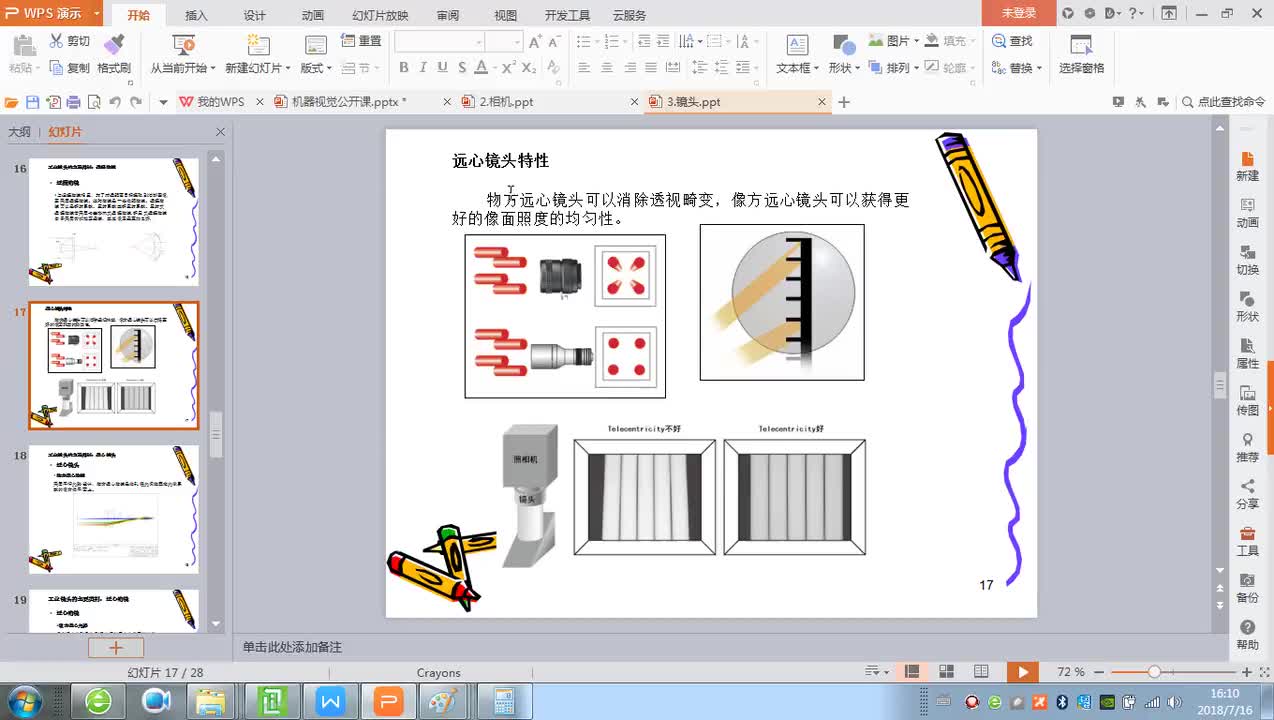
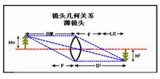
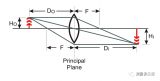
三、像方远心光路原理及作用
像方主光线平行于光轴主光线的会聚中心位于物方无限远,称之为:像方远心光路
作用:可以消除像方调焦不准引入的测量误差,用途:大地测量仪器
四、双侧远心光路原理及作用
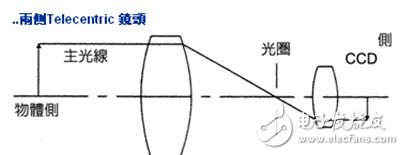
综合了物方/像方远心的双重作用。主要用于视觉测量检测领域。
优势:
1、大景深;
2、景深范围内物像倍率不变
3、低畸变通常<1%(全幅画面)
4、垂直成像时,无投影现象
劣势:
1、体积大、重量沉,由于平行光路入射,镜头的口径要大于被摄物体
2、焦距固定,变焦困难
3、工作距离相对较短
4、光阑小,需要更强的照明
在设计工业机器视觉系统时,使用工业数字相机还是工业模拟相机是最重要的决定之一。二者各有其优缺点,但归根结底要根据成本和一些关键操作因素来选择。如果考虑了这些因素,哪一项技术更有优势就会明朗化了。
机器视觉基础
机器视觉被应用于自动质量检验、工艺控制、参数测量和自动组装等等许多领域。在这些系统中,相机是决定着成本、速度和精度的关键组件。工业模拟相机和工业数字相机都可以用在这些系统中,而了解工业相机的性能规格及其在各种视觉任务中的重要性,对于把机器视觉付诸工业控制是最基本的一步。
机器视觉系统包括三个主要部分:工业相机、采集卡和存储并分析图像以提取信息的计算机(或图像处理器)。图像处理器和采集卡属于相对容易选择的电子装置,它们的主要参数是存储能力和处理速度。
工业相机是这些系统中情况最为复杂的部分。现代的工业模拟相机和工业数字相机采用电荷耦合器件(CCD)或互补金属氧化物半导体(CMOS)芯片来捕获图像并生成电子信号发送给计算机进行处理。
CCD和CMOS成像器由一系列方形光电池组成,它们将收集到的光子转化为电子,并将生成的电荷积蓄起来。在CCD中,当从芯片中每次读取一个像素时,电荷被转换成电压;而在CMOS中,每个光敏器件旁边的电路将光能转化成电压。
二者在图像质量上没有明显的优劣之分。基于CMOS的工业相机需要的部件较少,电耗较低,提供数据的速度也比基于CCD的相机快; 但CCD则是更为成熟的技术,能够以较低的噪声提供质量更好的图像,而弱点是数据传输速度较慢,不太灵活,部件较多和电耗较高。
信号精度
CCD和CMOS芯片在内部都生成模拟信号,因此,模拟相机和数字相机之间的主要区别在于图像是在哪里被数字化的。数字相机在相机里将信号数字化,并且通过串行总线接口(比如FireWire, USB, Camera Link, Gigabit Ethernet)将信号以数字方式传输给计算机(或图像处理器)。而在另一方面,模拟相机系统并不是在其内部将图像信号数字化(数字化是由计算机完成的),所以,模拟信息是通过同轴电缆而进行传输的。
尽管两种方法都能够有效地传输信号,但模拟信号可能会由于工厂内其他设备(比如电动机或高压电缆)的电磁干扰而造成失真。随着噪声水平的提高,模拟相机的动态范围(原始信号与噪声之比)会降低。动态范围决定了有多少信息能够被从相机传输给计算机。
数字信号不受电噪声影响,因此,数字相机的动态范围更高,能够向计算机传输更精确的信号。数字相机的典型动态范围在55分贝到60分贝之间,而模拟相机则为45分贝到50分贝左右。
所用电缆的长度和类型也影响着信号的精度。模拟相机的电缆简单而且便宜,在电噪声导致信号严重失真之前能够将信号可靠地300米以上。由于数字相机传输的是高带宽信号,电缆的长度受电缆中信号良师衰减(损失)水平的限制。根据使用的通信协议的不同,电缆的典型长度如下:
· FireWire: 大约10米到20米
· USB: 大约10米到 20米
· Camera Link: 大约10米
现在,市场上有了采用千兆位以太网标准电缆的新系统。这些电缆能够将数字图像数据传输100米左右而不发生损失。
分辨率和捕获速度
分辨率是描述相机性能的重要参数之一,它包括两个方面:
· 阵列中传感单元或称像素的数量
· 每个传感单元的大小
模拟相机通常是基于视频图形阵列(VGA)成像格式,分辨率被限制在大约640×480像素。这只是机器视觉系统要求的下限。而在另一方面,数字相机能够达到80兆像素甚至更高。模拟相机和数字相机典型的像素大小在3微米到20微米范围内。
第二个重要参数是帧速,或者说相机连续提供图像的速度。帧速越高,在给定时间内能够完成的检验、测量或识别工作就越多。像素数和帧速之间存在着相互影响,所以,相机的像素数越多,其帧速越低。但是,这并非是一成不变的规则,因为尺寸越小的半导体转换速度通常就越快,所以像素数相同的两台相机可能具有差别很大的帧速。
640×480像素模拟相机的典型帧速为每秒30帧,而分辨率为2兆像素(1600×1200像素)的数字相机能够达到相同的帧速。16兆像素的数字相机帧速约为每秒3帧。
另外,相机传感器可采用多端口设计,将图像分解成片段以同时读出。还可以在软件的控制下只读取图像中“感兴趣”的部位而不是读取全部传感器阵列,同样能够缩短传输时间。
其他因素
除了分辨率和帧速,其他重要的设计因素还包括动态范围和灵敏度。
动态范围或图像每个像素的字节数决定着采集卡需要的存储容量以及图像处理器需要的算法精度。它也影响着传感器的曝光宽容度。每像素只有几个字节的相机将无法像字节数更高的相机那样满足很宽的照明条件范围。一般来说,数字相机的动态范围指标更好一些,因为它们的抗噪声性能更好。
传感器灵敏度也决定着可靠地使用相机所需要的照明条件。在光线不好或者为防止运动图像模糊而提高快门速度的情况下,要求相机具有更高的灵敏度。
同波长有关的相机灵敏度也许非常重要。根据应用的不同,可能需要采用发光二极管甚至红外或紫外照明,相机的波长灵敏度也应当匹配。最后,相机生成彩色或者单色图像的能力也十分重要。
关于总成本的考虑
各个设计参数共同影响着相机的成本。典型情况下,由于传感器尺寸的原因,像素数越高的相机就越昂贵。与此类似,在一定的分辨率下,帧速提高,成本也趋向于增加。同时提高帧速和分辨率通常要求相机具有多端口读出,这使系统的复杂程度增加,因而提高了成本。
从上世纪七十年代起,许多供应商都开始提供基于CCD和CMOS技术的模拟相机。典型的价位在200美元左右。模拟相机采集卡的价位也在200美元左右。
相比之下,数字相机的价位在1,000美元到20,000美元范围内大幅度变化,数字相机采集卡的价位在1,000美元到2,000美元之间。但是,随着数字相机和采集卡变得越来越普及,它们的价位也在逐渐降低。
在对成本进行比较时,设备的价格还只是问题的一个方面。设计人员还必须考虑软件、硬件、安装、维护和升级等方面的成本,还有,给定的相机技术是否能够达到要求的性能。
完成特定任务所需要的工业相机数量在安装成本中占到了一定比例。举例来说,从1毫米见方的检验区域中解析出1微米见方的片段,可能需要用到5台模拟相机和采集卡,而这些制备必须保持同步以获得清晰的图像。
只使用1台百万像素的工业数字相机和采集卡就可以解析同样大小的区域,而且无需在计算机中同步处理多幅图像。例如,一家汽车制造商的保险杠检验系统需要12台模拟相机、12片采集卡12套软件和3台计算机。公司发现,就算可能,使所有相机的图像同步化以获得一幅保险杠的可靠图像也是难度相当大的。用1台百万像素的数字相机、1片采集卡和1台计算机取代了这个相机阵列后,系统的安装和维护都变得十分简单和方便。
一般来说,典型的数字相机需要更长的时间进行安装和设定,但对于前述应用实例而言,需要的数字相机数量大为减少。因此,维护成本也将大幅度降低。另外,数字相机的功能性和灵活性都更强,能够快速重新编程,在系统运行过程中即可进行现场固件升级。而相比之下,模拟相机则必须被送回制造厂才能进行性能升级。
最后一项成本因素是功率消耗。典型的模拟相机需要5瓦到10瓦操作功率,而分辨率指标相当的数字相机则不到1瓦。
应用要求
对于一项应用,选择什么样的工业相机合适,取决于机器视觉系统想要达到什么目标。视觉检验、非接触式测量、物体识别和定位是三个常见的应用,每一个都有不同的要求。
典型的检验系统将图像同模板或者“已知合格品”图像进行对比以检查偏差。高质量的图像一般需要用图像处理器来进行可靠的对比。这意味着,工业相机必须同时具有高分辨率和每像素足够的字节数。可能也需要彩色成像能力。
非接触式测量计算一个物体占据的像素数量,并将计数结果转化成尺寸数值。这样的系统可能需要高分辨率,而每像素的字节数要求可能不必太高。图像处理器通常只提取图像的边缘或外形轮廓信息,所以,一般并没有很高的动态范围和彩色能力要求。
物体识别和定位有各种各样的要求。在许多情况下,图像处理系统在图像中搜寻以识别出基准特征。需要的分辨率取决于这些特征相对于整个图像尺寸的大小。识别系统可能会需要彩色成像能力。
为机器视觉系统选择相机时要认真考虑工业相机的性能和成本。虽然工业模拟相机远比工业数字相机便宜,但它们的分辨率和图像质量较低,所以可能会被局限在要求不太高的应用中。数字相机比模拟相机昂贵,但它们的高成本可能值得为要求高速度、高准确度和高精度的应用而付出。
四种工业相机接口技术的比较
GigE
Firewire
USB
Camera Link
标准类型
Commercial
Consumer
Consumer
Commercial
连接方式
点对点或LAN link
(Cat 5 TP - RJ45)
点对点
– 共享总线
主/从
– 共享总线
点对点
– (MDR 26 pin)
带宽
<1000Mb/s
连续模式
<400Mb/s
连续模式
<12Mb/s USB1 <480Mb/s USB2 突发模式
<2380Mb/s (base) <7140Mb/s (full)
连续模式
距离:
-max w/switch
-max w/fiber
<100m(no switch)
No Limit
No Limit
<4.5m
72m
200m
<5m
30m
<10m
可连接设备数量
Unlimited
63
127
1
PC Interface
GigE NIC
PCI card
PCI card
PCI Frame grabber
1、模拟相机&&数字相机
模拟相机必须带数字采集卡,标准的模拟相机分辨率很低,另外帧率也是固定的。这个要根据实际需求来选择。另外模拟相机采集到的是模拟信号,经数字采集卡转换为数字信号进行传输存储。模拟信号可能会由于工厂内其他设备(比如电动机或高压电缆)的电磁干扰而造成失真。随着噪声水平的提高,模拟相机的动态范围(原始信号与噪声之比)会降低。动态范围决定了有多少信息能够被从相机传输给计算机。数字相机采集到的是数字信号,数字信号不受电噪声影响,因此,数字相机的动态范围更高,能够向计算机传输更精确的信号。
2、相机分辨率
根据系统的需求来选择相机分辨率的大小,下面以一个应用案例来分析。
应用案例:假设检测一个物体的表面划痕,要求拍摄的物体大小为10*8mm,要求的检测精度是0.01mm。首先假设我们要拍摄的视野范围在12*10mm,那么相机的最低分辨率应该选择在:(12/0.01)*(10/0.01)=1200*1000,约为120万像素的相机,也就是说一个像素对应一个检测的缺陷的话,那么最低分辨率必须不少于120万像素,但市面上常见的是130万像素的相机,因此一般而言是选用130万像素的相机。但实际问题是,如果一个像素对应一个缺陷的话,那么这样的系统一定会极不稳定,因为随便的一个干扰像素点都可能被误认为缺陷,所以我们为了提高系统的精准度和稳定性,最好取缺陷的面积在3到4个像素以上,这样我们选择的相机也就在130万乘3以上,即最低不能少于300万像素,通常采用300万像素的相机为最佳(我见过最多的人抱着亚像素不放说要做到零点几的亚像素,那么就不用这么高分辨率的相机了。比如他们说如果做到0.1个像素,就是一个缺陷对应0.1个像素,缺陷的大小是由像素点个数来计算的,试问0.1个像素的面积怎么来表示?这些人以亚像素来忽悠人,往往说明了他们的没有常识性)。换言之,我们仅仅是用来做测量用,那么采用亚像素算法,130万像素的相机也能基本上满足需求,但有时因为边缘清晰度的影响,在提取边缘的时候,随便偏移一个像素,那么精度就受到了极大的影响。故我们选择300万的相机的话,还可以允许提取的边缘偏离3个像素左右,这就很好的保证了测量的精度。
3、CCD&CMOS
如果要求拍摄的物体是运动的,要处理的对象也是实时运动的物体,那么当然选择CCD芯片的相机为最适宜。但有的厂商生产的CMOS相机如果采用帧曝光的方式的话,也可以当作CCD来使用的。又假如物体运动的速度很慢,在我们设定的相机曝光时间范围内,物体运动的距离很小,换算成像素大小也就在一两个像素内,那么选择CMOS相机也是合适的。因为在曝光时间内,一两个像素的偏差人眼根本看不出来(如果不是做测量用的话),但超过2个像素的偏差,物体拍出来的图像就有拖影,这样就不能选择CMOS相机了。
4、彩色&黑白
如果要处理的是与图像颜色有关,那当然是采用彩色相机,否则建议你用黑白的,因为黑白的同样分辨率的相机,精度比彩色高,尤其是在看图像边缘的时候,黑白的效果更好。
5、帧率
根据要检测的速度,选择相机的帧率一定要大于或等于检测速度,等于的情况就是你处理图像的时间一定要快,一定要在相机的曝光和传输的时间内完成。
6、线阵&面阵
对于检测精度要求很高,面阵相机的分辨率达不到要求的情况下,当然线阵相机是必然的一个选择。
7、传输接口
根据传输的距离、稳定性、传输的数据大小(带宽)选择USB、1394、Camerlink、百兆/千兆网接口的相机。
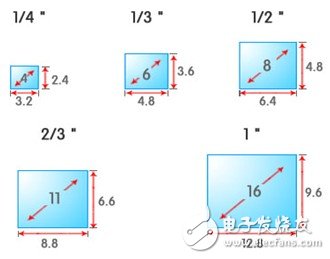
8、CCD靶面
靶面尺寸的大小会影响到镜头焦距的长短,在相同视角下,靶面尺寸越大,焦距越长。在选择相机时,特别是对拍摄角度有比较严格要求的时候,CCD靶面的大小,CCD与镜头的配合情况将直接影响视场角的大小和图像的清晰度。因此在选择CCD尺寸时,要结合镜头的焦距、视场角一起选择,一般而言,选择CCD靶面要结合物理安装的空间来决定镜头的工作距离是否在安装空间范围内,要求镜头的尺寸一定要大于或等于相机的靶面尺寸。
9、相机的价格
同样参数的相机,不同的厂家价格各不相同,这就靠大家与厂家沟通和协商了。一般说来,如果你有量的话,整体价格跟你单买一个的价格是差别很大的。
工业相机到传感器对应放大倍率
工业相机像幅
传感器尺寸( 对角线 )
9’’
12’’
13’’
20’’
27’’
1/4’’
57.2x
76.2x
82.6x
127x
171.5x
1/3’’
38.1x
50.7x
55.0x
84.6x
114.1x
1/2’’
28.6x
38.1x
41.3x
63.5x
85.7x
2/3’’
20.8x
27.7x
30.0x
46.2x
62.3x
1’’
14.3x
22.2x
23.8x
31.8x
42.9x














 工商网监
工商网监
评论