 电子发烧友App
电子发烧友App


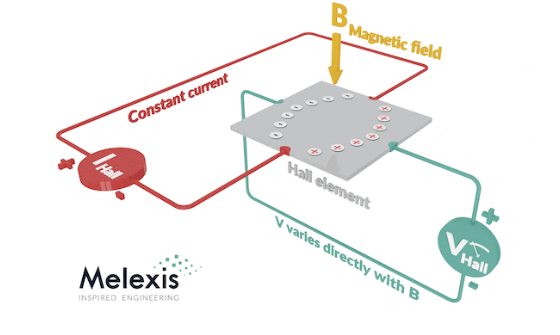
作为汽车产业的一个组成部分,霍尔效应传感器用于在诸如底盘、安全、车身、保障及动力传动等极其广泛的一系列应用中检测端位置或测量线性或角运动。目前,主导汽车行业研发讨论的一个重要话题是功能安全。功能安全影响到所有应用系统组件的设计和功能设置,包括霍尔传感器。
由于霍尔传感器的非接触式测量原理和高可靠性,在许多应用中,用霍尔传感器实现的感知方案成为了首选。
例如,由于霍尔传感器对环境条件(如灰尘、湿度和振动)的不敏感性,即使在十分苛刻环境温度条件下(-40℃至150℃),其测量结果的一致性仍然很好,再加上其不受使用时间和使用次数,而影响测量精度的高品质等特性,霍尔效应传感器正逐步取代机械开关。
为了实现不断发展的安全和可靠性特性,开关阈值的最高精度成为了霍尔开关规范的基本参数。
在由一个磁信号通过开关阈值触发的实际开关操作中,其动作会受开关延迟、采样抖动和噪声阈值等各因素的影响。上述这些因素都是不希望的,一个理想的开关应在瞬间做出反应,但由于霍尔IC的内部信号处理,它们无法完全避免。
为了获得最佳开关性能, Micronas公司的霍尔效应开关系列的最新产品(HAL 15xy)内的信号处理对此进行了专门设计,以增强对这些负面影响的抑制能力。
本文分析了信号路径设计是如何影响输出信号的抖动性能的,并介绍了解决这一问题所采取的不同设计方法。
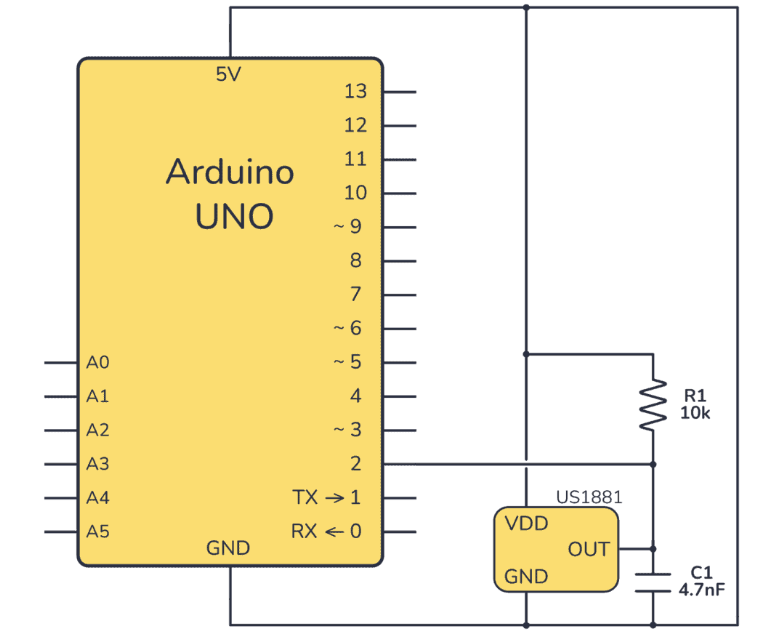
霍尔开关的信号路径
霍尔开关的简化信号路径包括几个基本组件,如图1所描述:

图1:简化的霍尔开关信号路径。
该集成霍尔传感器将磁通密度转换成电信号,可选的低通滤波器限制了信号带宽,采样或无采样比较器判定该信号是高于还是低于当前的作用阈值。
每次被采样时钟触发时,被采样的比较器都做出新决策;而未被采样的比较器无需触发持续运行。
在采用低通滤波器的情况下,它抑制高于有用信号带宽的频率分量,以降低这些频率范围产生的噪声。
许多霍尔传感器IC,包括Micronas的霍尔开关系列,采用著名的旋转电流(spinning-current)技术以实现优异的补偿性能。为简化,图1省略了所有与旋转电流相关的模块。
带滞后的静态开关行为
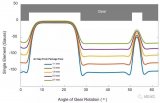
霍尔开关具有两种不同的磁阈值——Bon和Boff,它们形成磁滞回线。此行为对避免不必要的翻转或闪抖是必要的,若没有这种迟滞,则会发生这种不必要的麻烦。图2显示的是假设在非反向输出状态时的静态输出状态与磁通密度B的对比曲线图。

图2:霍尔开关的静态磁滞回线。
在Bon和Boff之间,两个输出状态都是可能的。在B》Bon时,输出肯定为0;在Boff前,开关都将保持为0;在Boff时,输出变为1。
阈值噪声和最小可靠滞后
现在可能有这个问题:磁滞回线可做得多小?为给出答案,必须考虑阈值噪声影响。实际上,Bon和Boff都不是限定为单一值的固定阈值,受由霍尔传感器本身和其它电路的热噪声所引起的阈值噪声的影响,这两个值变得飘忽不定。取决于电流消耗和滤波器带宽,噪声水平可通过设计进行调整。噪声添加到假定原本是恒定的阈值上。现在,图3显示了Bon和Boff的概率密度函数(不按比例)。

图3:阈值噪声的概率密度函数
概率密度的高度是其在相应磁通密度B条件下,找到瞬时阈值可能性的一种标度。对热噪声来说,其概率呈正态(高斯)分布。该密度函数的宽度由标准偏差σBth给出,其值与阀值的均方根(RMS)噪声值Bth,rms相同。
因为密度不可能为0,Bon和Boff概率密度的尾线将总是在Bon和Boff的中点Bmid处趋合。这意味着,对于恒定磁通密度Bmid来说,Bon阀值有时可能(小概率)低于Bmid,从而打开开关。另外,Boff有时也可能高于Bmid,这又会关闭开关。这样,即便对恒定磁通密度,开关也可能开始翻转,这通常是不希望的。这种现象不可能完全避免,但应充分减小其发生概率。作为经验法则,如果Bon-Boff的差值大于等于10~12σBth,则这种情况可以忽略不计。
滤波的采样霍尔开关
HAL 15xy传感器家族的信号处理基于带低通滤波器的采样设计。这样,当对经滤波的输入进行新取样时,开关输出的翻转仅在时间上的特定等距点才会发生,对 HAL 15xy传感器来说,是每隔2μs。在B穿过翻转阈值的时间点与采样时钟不同步时,会导致采样抖动。图4给出了滤波采样开关(如HAL 15xy)的时序样例:
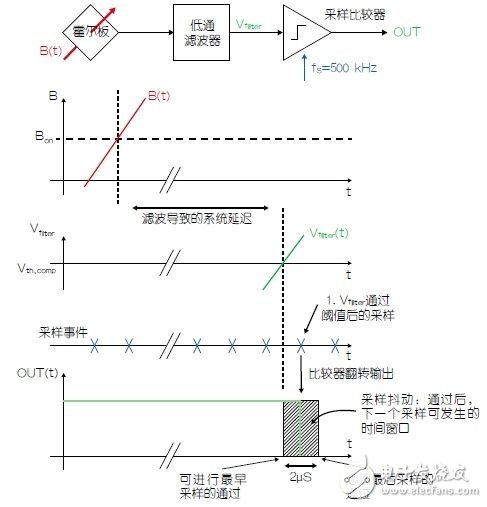
图4:滤波采样霍尔开关的延迟。
此处,假设磁通密度B(t) 在通过Bon时完成一个非常快的迁跃,以保持阈值噪声影响在当下可忽略不计。霍尔信号正比于B(t),然后使该信号通过一个低通滤波器,以消除更高带宽的阈值噪声。
它需要一个恒定的系统延迟Δtsyst,直到穿过阈值的信号通过滤波器,例如,这里的Δtsyst为15~16μs。此外,将出现最长为2μs的随机延迟相位,直到下一次采样发生且比较器翻转。当霍尔开关反复翻转时,该随机延迟被称为采样抖动Δtsampling。
采样抖动可由峰-峰值或均方根(RMS)值描述。在2μs采样间隔内,由峰-峰值描述的HAL 15xy传感器的Δtsampling=±1μs。所有时间点被发现的几率是相同的(概率分布形状像个“盒子”)。这样,其RMS的典型值 Δtsampling为0.58μs、最大值为0.72μs,比竞争产品具有更好性能。
对HAL 15xy系列产品来说,其采样比较器选为工作在500 kHz采样速率,以保证典型的采样抖动被可靠地限制在±1μs。此类设计支持在比较器内采用动态补偿抑制,从而提升了HAL 15xy传感器磁性阈值的整体精度。
另外,该传感器有一个独特的前端设计,通过使用金属掩模编程,在不增加采样抖动的情况下,可实现对低通滤波器的带宽在3kHz和93kHz间的灵活定义。一方面,较小的带宽增大了信号路径的系统延迟;但另一方面,也降低了开关的阈值噪声、提高了精度。更高带宽的情况与上述正好相反。归功于该特性, HAL 15xy系列可针对具有快速动态或静态磁场要求的应用进行客户定制。
无滤波的采样霍尔开关
像 Micronas的HAL 5xy系列等霍尔开关,采用的是没有滤波IC的设计。根据顾客喜好,没有滤波的低延迟特性对快速响应有吸引力,但代价是噪声阈值的增加。对这样的霍尔开关来说,采样抖动仍然存在,但因没有滤波器加入,其系统延迟没有了。图5显示了此类开关的一般动态行为。

图5:没有滤波的采样霍尔开关的延迟。
这就是为什么HAL 5xy传感器随机延迟的峰-峰值Δtsampling,pp=±8μs,而RMS值Δtsampling,rms.=±4.6μs,这一对比,凸显了同样来自Micronas的其继任产品HAL 15xy的更佳性能。
HAL 15xy系列开关抖动的产生原因
最有趣的是霍尔开关开关抖动Δtswitch的产生原因。开关延迟的随机分布——开关抖动,可根据图8予以考虑。

图8:由阈值噪声和采样抖动引发的开关抖动。
Hall plate: 霍尔板
Low-pass filter: 低通滤波器
Sampled comparator: 采样比较器
Possible crossing range: 可能的通过范围
Effective noise band around threshold: 阀值周围的有效噪声带
Syst. Delay from filtering:过滤导致的系统延迟
Sample events: 采样事件
Sampling jitter△tswitch: time window where next sample after crossing can
happen: 采样抖动△tswitch:通过后,下一个采样可发生的时间窗口
Crossing can be sampled earliest:可进行最早采样的通过
Crossing must be sampled latest: 必须最后采样的通过
在此,阈值噪声和采样抖动都存在,导致了组合开关抖动。B(t)缓慢穿过有效阈值,因此阈值噪声不能再忽略。在有效阈值周围绘制了噪声带。图8表示瞬时阈值可以被定位在哪里。噪声频带内,B(t)在时间轴上的投影只是给出了来自阈值噪声的时序抖动Δtthres.noise。这种时序抖动出现在滤波器输出电压Vfilter时是有延迟的。现在,当输出翻转时,最终的开关抖动包含来自阈值噪声的抖动以及始终存在的采样抖动。
注意,图8忽略了来自阈值噪声和采样抖动这两种抖动的不同概率密度,另外,这两者都会影响开关抖动。对高斜率来说,采样抖动占主导且可被用来估计开关抖动。对低斜率来说,采样抖动虽也存在,但有效阀值噪声是主导。
通过设置使采样抖动Δtsampling,rms=Bth,rms抖动(阀值噪声引入),可容易地发现高、低斜率之间的边界。

因此,当磁变化速率远低于124mT/ms时,所产生的开关抖动可仅根据来从阈值噪声的抖动进行评估,采样抖动可忽略不计。
结论
霍尔开关的抖动有两个来源。第一,霍尔板的热噪声和信号处理导致的阈值噪声;第二,采样引致因系统而异的采样抖动。通过Micronas专有技术的优化配置,HAL 15xy传感器系列工作于非常高的采样频率,因此,产生的采样抖动非常小。这种新的和优化的电路设计,可以在保证极低热噪声的同时保持低功耗,具有同类产品最佳的噪音表现。此外,可通过金属掩膜编程减少或增加模拟滤波器的带宽,使最小化噪声或延迟时间成为可能。











 工商网监
工商网监
评论