电机位置编码器广泛用于伺服驱动器、机器人、机床、印刷机、纺织机和电梯等工业电机控制应用。用接口把这些编码器连接到您系统的其它部分会带来一些棘手的电磁兼容(EMC)问题。为帮您应对这些挑战,笔者将以
2018-05-16 08:43:56 8250
8250 关闭定时器。以上控制方式都没实现对步进电机的位置的自由控制,即让步进电机跟随任意位置曲线运动,此项目是为了实现步进电机的自由控制,能准确定位。可以使用编码器或者电位器作为控制器,用手拧编码器,步进电机可跟随一起运动,也可以按照函数曲线运动。
2022-10-14 11:28:383482 1. 最常见的电机位置传感器有哪些? 用于电机的最先进的位置传感器被认为是基于旋转变压器(resolver-based)和编码器(encoder-based)的传感器。 1.1基于旋转
2023-08-30 09:09:022865 
步进电机基本上以开环电路驱动,用于位置控制 。换句话说,步进电机以外的电机尤其是高精度的步进电机之外并没有做开环控制定位的,而用开环电路驱动的电机只有步进电机。
2023-09-22 10:37:59680 
如题,定位系统为步进电机+光栅尺的全闭环系统,麻烦问下各位大佬位置补偿算法一般都采用哪些呢?PID吗?重复精度需要提高到10几微米左右,求助求助
2024-01-09 08:01:10
应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此也经常会出现一些定位不准的故障。步进电机定位不准一般由以下几方面原因引起:1、 改变方向时丢脉冲,表现为往任何一个方向都准,但一改变方向就累计偏差,并且次数越多偏得越多;...
2021-07-06 07:22:38
高精度控制方面,伺服电机才能真正精确定位,步进的是不行的。步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置
2021-06-28 08:02:48
直流电机分为哪几种?什么是步进电机?步进电机可以实现电机转速和位置的精确控制吗?
2021-09-14 06:10:07
带编码器的步进电机,电机在工作的情况下有时会出现电机自身的步数和编码器测得的步数不一致的情况!以编码器测得的步数和电机自身的步数对比,调整电机步数,有时会出现调整后的电机位置与预设位置不符现象,(步进电机步数准确,编码器不准确?)问下有什么办法解决没?
2018-05-09 22:37:31
步进电机基础(8.2)-步进电机的问题解决方案-降低振动噪音的解决方法前言基本信息前言说明8.2 降低振动噪音的解决方法1. 与驱动电路有关的方法2. 与电机有关的方法降低振动和噪音效果好的方法如下
2021-07-08 09:40:18
:转子的加速度慢子步进电机的旋转磁场,即低于换相速度时,步进电机会产生丢步。这是因为输入电机的电能不足,在步进电机中产生的同步力矩无法使转子速度跟随定子磁场的旋转速度,从而引起丢步。解决方法: ①使步进
2023-04-15 16:33:58
步进电机基础(8.1)-步进电机的问题解决方案-增加动态转矩的解决方法前言基本信息前言说明8.1 增加动态转矩的解决方法1 . 步进电机在低速时增加转矩的方法1) 选择步距角小的步进电机2) 双极型
2021-07-07 07:29:39
步进电机最简单的驱动方法,了解四轴步进电机驱动器原理 四轴步进电机驱动器原理-简介四轴步进电机驱动器,其实就是一种将电脉冲转化为角位移的执行机构。首先步进驱动器会接收到一个脉冲信号,然后它按设定
2021-07-12 08:18:40
》这本书,进行的学习过程中的知识记录和心得体会的记录。5.6 闭环控制 步进电机基本上以开环电路驱动,用于位置控制。换句话说,步进电机以外的电机尤其是高精度的步进电机之外并没有做开环控制定位的,而用开环电路驱动的电机只有步进电机。例如无刷电机,首先为切换相,
2021-07-07 06:18:52
”是不言而喻的。 LIN步进电机驱动器解决方案 步进电机驱动器的细分越高,步进电机的精度就越高? 这是一种错误的观念。比如步进电机驱动器细分较高的可以达到60000个脉冲一转,而步进电机实际是无法分辨这个
2020-06-25 08:00:00
电机位置信号的重要性在永磁同步电机FOC控制算法中,需要用到一个非常重要的物理量是电机的位置信号。这个位置信号到底有多重要呢?还是用数据来说话吧。笔者搭建了一个电机的电流环仿真模型,固定电机转速
2021-08-27 07:36:41
我要做电机位置随动的仿真,就是模拟信号转化数字量,然后电机根据数字指令转相应角度(位置),电机用的是位置编码电机就是可以发出脉冲数的那种,,真得很急用啊 ,,有没有大神帮帮忙,或者给我个思路也可以。!!!!
2014-09-09 01:22:09
27VDC。四、工作量要求1、完成控制系统原理图设计;2、完成直流伺服电机位置控制系统建模,PID控制器的设计,基于LABVIEW的实时控制软件开发及实验,完成仿真结果与实验结果的对比分析,并提出改进措施
2019-04-02 09:40:03
控制步进电机位置、速度的实时软件设计。实验用设备:1.具有ISA总线插槽和USB接口的PC系列微型计算机。2.23HS2001型步进电机。3.SH-2H042Ma步进电机驱动器。4.24V直流稳压电源。...
2021-09-10 06:21:45
?3,如果保证电机位置/电流采集发生的同时性;4,如果电机位置/电流采集不是同一时刻的,对控制精度到底有多大的影响,如何衡量呢?5,电机位置/电流采集会带来多少Delay 呢?下图是一个电机位置/电流
2016-10-24 20:45:11
);analogWrite(10,100)analogWrite(9,100) 就失败,解决方法时[size=15.9984px]把直流电机的引脚分配到 356 11 这四个引脚 ,即可解决问题[size
2016-06-24 23:45:10
编码器能够满足高精度、高可靠性、低成本的设计要求。那么将AS5040磁旋转编码器应用于永磁同步电机位置检测时,需要解决两个问题:一是磁旋转编码器安装位置初始定位,即确定编码器输出的位置信号与电机实际
2021-09-22 09:41:15
两个步进电机用一个定时器发生脉冲,要让一个转动一定位置,再让另一个转动一定位置,一个电机转动的不错,两个电机,位置就慢慢不对了,是不是有干扰什么的?
2023-10-25 07:17:50
步进电机基础(8.3)-步进电机的问题解决方案-改善暂态特性的解决方法前言基本信息前言说明8.3 改善暂态特性的解决方法1. 利用阻尼器的改善2 . 利用驱动电路的改善(1) 半步进1-2相激磁
2021-07-07 06:27:00
的相位转换,可大大改进步进电动机的性能。在闭环控制的步进电机系统中,或可在具有给定精确度下跟踪和反馈时,扩大工作速度范围,或可在给定速度下提高跟踪和定位精度,或可得到极限速度指标和极限精度指标。
2018-08-30 10:41:23
位置检测手段间的各类伺服系统进行初始定位过程中,大多运用到霍尔元件检测转子初始位置”,故霍尔元件安装位置检测成为何服系统配装电机必须经历的步骤。由于永磁同步电机伺服电机系统能够向智能化方向发展,有必要
2020-06-30 10:28:19
课题是永磁同步电机位置控制,看了很多文章,然并卵,最好是基于智能算法的就更好了。
2015-12-31 10:38:24
怎么才能实现高精度的步进电机位置控制
2023-10-13 07:40:50
我现在搞异步电机位置控制。请问高手,电机精确定位硬件上有什么特殊要求吗?谢谢!我电机上接了码盘,可是电机有惯性,发送停止命令,电机还要再转一下才停。怎么解决?谢谢!
2018-11-22 10:04:51
供电,但由于惯性,电机总是还会旋转一段距离,累计误差很大,请问有什么更好的方法来控制电机位置吗,如何解决电机惯性的问题 这里不对转速有任何要求,只要求位置精确
2020-03-13 05:20:31
用于测量步进电机旋转精度的搞定度绝对位置旋转编码器BH38 也在 写文章-CSDN博客 进行了测试。在本实验中,将根据 使用高精度旋转编码器BH60测量步进电机转动角度 文章中的方法对本款测试步进电机的旋转精度进行测量。 01初步运动测试1.实验方案1实验方案采用 42HS48EIS步进
2021-07-07 08:04:16
对拓达伺服步进电机的频响也有了确定的控制,因为位置环不能精确控制伺服步进电机以何种速度和加速度达到预定位置,而速度环和加速度环可以。所以要根据需求选择闭环控制策略。一般来说高精度的定位控制不光要用位置环还要合并使用速度环和加速度环来控制。
2018-08-25 10:05:53
。AS5040磁旋转编码器能够满足高精度、高可靠性、低成本的设计要求。 那么将AS5040磁旋转编码器应用于永磁同步电机位置检测时,需要解决两个问题:一是磁旋转编码器安装位置初始定位,即确定编码器输出的位置
2023-03-09 15:30:26
如题无刷电机做位置伺服控制:无刷直流电机的极对数为1对,电机的旋转精度是不是正负60度。如果想要提高定位精度是不是选用极对数高的无刷机做位置伺服控制
2015-11-10 21:29:08
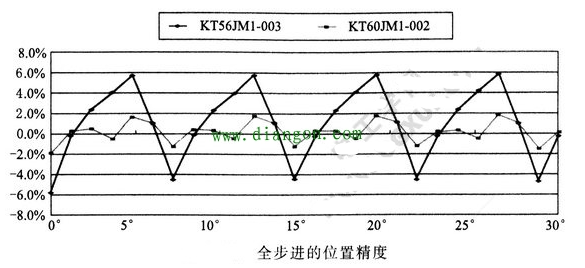
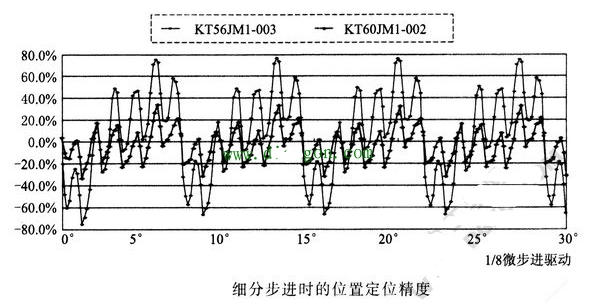
步进电机基础(8.4)-步进电机的问题解决方案-位置定位精度的解决方法前言基本信息前言说明8.2 位置定位精度的解决方法1 . 驱动电路的改善(1) 额定电压(电流)驱动:(2) 2相激磁驱动:(3
2021-07-07 07:16:07
、直线电机的定位原理说明( 博扬直线电机)直线电机,通常根据机构所要求的精度,配合选择合适的光栅尺,形成闭环反馈,精度高直线电机和光栅尺大致决定了整个系统的定位精度。光栅编码器是常用的位置和速度传感器
2021-07-12 06:56:34
我想用类似红外对管电路控制步进电机到达指定位置时停止,有啥好方案
2014-12-18 09:28:15
伺服电机与步进电机定位精度上哪个更精确些?在使用上哪个操作比较简单些
2023-12-12 08:07:14
一、实验目的 :1. 学习和掌握步进电机及其驱动器的操作和使用方法 ;2. 学习和掌握步进电机单轴定位控制方法 ; 3. 了解步进电机的频率特性 ;
2008-10-07 23:53:02 0
0 一种实用的步进电机驱动电路
步进电机具有快速启停、精确定位的特点,在数字控制领域经常使用步进电机作为位置控制的执行机构.步进电机在
2010-01-09 21:13:451773 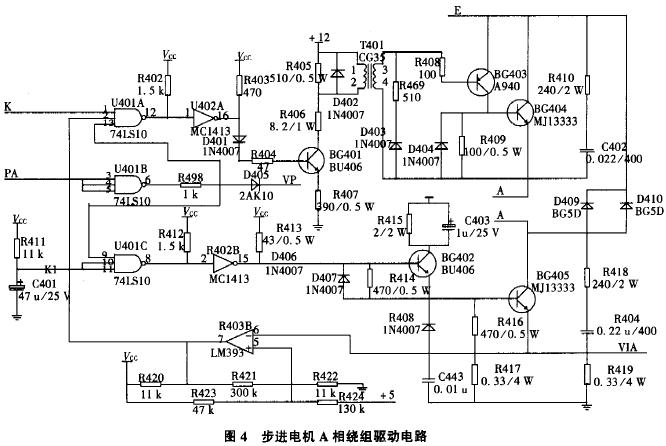
步进电机的结构特点使之适合于精细的位置控制应用。与直流电机相比较, 在这类应用场合中,步进电机的优点有: ●电机停止时具有保持转矩 ●控制简单,开环控制定位精度高且具有较高的重复定位精度 ●不需要电刷,因而提高了电机的可靠性与使用寿命 ●调速方
2011-01-13 16:49:5977 永磁交流同步直线电机位置伺服控制系统设计
2016-04-26 11:02:0115 电磁发射用直线感应电机位置检测系统_何娜
2017-01-08 12:03:281 基于改进反电势积分的永磁同步电机位置检测_刘刚
2017-01-08 13:38:539 基于终端滑模负载观测器的永磁同步电机位置系统反步控制_方一鸣
2017-01-08 13:49:171 电机位置编码器广泛用于伺服驱动器、机器人、机床、印刷机、纺织机和电梯等工业电机控制应用。用接口把这些编码器连接到您系统的其它部分会带来一些棘手的电磁兼容(EMC)问题。为帮您应对这些挑战,笔者将以
2017-04-26 13:16:121274 由于开环控制系统具有操作方便,价格低廉的优点,所以我国所采用基本是以开环控制反应式步进电机为主。虽然步进电机应用广泛,但其并不能如同普通的交(直)流电机在常规条件下使用,且从起点到终点的运行速度在理论状况下,在电机的极限起动频率大于运行的速度时,电机可按要求运行,并可达到预期的运行速度。
2017-11-01 10:51:0320542 电机位置编码器广泛用于伺服驱动器、机器人、机床、印刷机、纺织机和电梯等工业电机控制应用。用接口把这些编码器连接到您系统的其它部分会带来一些棘手的电磁兼容(EMC)问题。为帮您应对这些挑战,笔者将以
2017-11-17 01:53:522544 本文开始介绍了步进电机的基本原理,其次介绍了步进电机工作效率以及使步进电机的效率最大化的方法,最后介绍了步进电机选型的步骤与方法。
2018-04-25 14:06:014299 
电机控制系统中的电机位置信息采集技术
2018-08-22 00:20:003906 步进电机位移与输入脉冲信号数相对应,精度高、响应特性好、可靠性高、速度可在较宽范围内平滑调节,是控制系统中一种重要的自动化执行元件。
2018-09-07 09:14:004169 
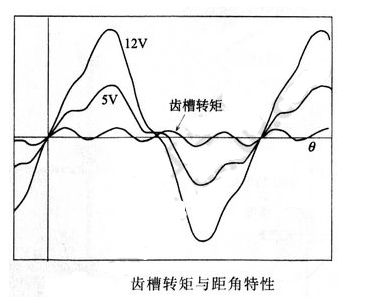
额定电压(电流)驱动:参见前文《步进电机的静态转矩特性及测量方法》一文的下图,从额定电压降低电压来驱动步进电机,发现位置定位精度变差。
2019-10-07 16:17:002130 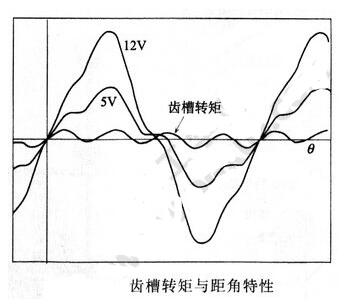
其中(1)的高次谐波为主要原因。步进电机使用方波电流驱动,必然含有大量的高次谐波,由此产生振动和噪音。因此驱动电流最好为正弦波。接近正弦波的驱动方法有步进电机的细分步进驱动。下图为电机1/4细分、半步、整步驱动的振动比较,其振动为依次增加的。
2019-12-10 09:25:348494 顾名思义,无刷直流电机没有电刷触点,需要使用电机位置传感器(MPS)来测量定子与转子之间的相对位置,以确保定子线圈按正确顺序通电。电机位置传感器在启动时至关重要,因为此时微控制器没有可用的反电动势来确定转子和定子的相对位置。
2020-05-04 16:57:006158 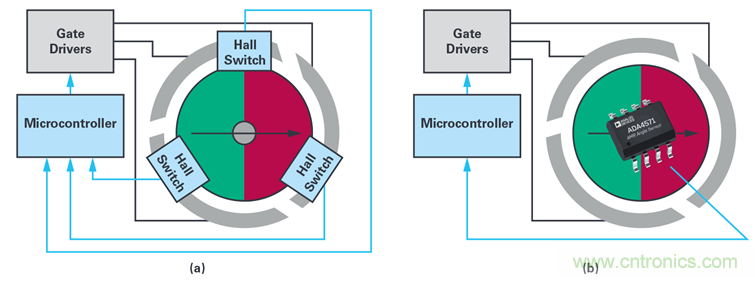
低1/2。 ②跟混合式(HB)型步进电机比较,气隙大,爪级构造,步距角度大,即同一转速情况下,想切换的次数小、噪音较低。 ⑵缺点: ①因分辨率低(步距角7.5比较大)的关系,位置定位误差比混合式(HB)型步进电机要差,特别是1相激磁时的角度精度会更
2020-05-31 09:26:423358 直流无刷电机位置传感器有:磁敏式、光电式和电磁式三种类型。 使用磁敏式位置传感器的直流无刷电机,其磁敏器件(如霍尔元件、磁敏二极管、磁敏导电管、磁敏电阻或专用集成电路等)被安装在一个定子组件上,用于
2020-12-31 10:35:274707 无刷电机位置传感器有:磁敏式、光电式和电磁式三种类型 使用磁敏式位置传感器的直流无刷电机,其磁敏器件(如霍尔元件、磁敏二极管、磁敏导电管、磁敏电阻或专用集成电路等)被安装在一个定子组件上,用于检测
2021-09-17 11:05:413091 近期许多顾客咨询步进电机安装编码器及步进电机安装难题,这儿简易做一个详细介绍,实际请咨询工程师给予解决方法!
2021-09-28 09:16:491518 关于定位控制(Positioning,调节(Regulated)和控制(Controlled)操作之间存在一些区别。步进电机小需要连续的位置控制,而在控制操作中得到应用。
2022-10-19 12:57:561872 电子发烧友网站提供《带按钮的Arduino控制伺服电机位置.zip》资料免费下载
2022-11-07 15:04:253 电子发烧友网站提供《直流电机位置控制开源分享.zip》资料免费下载
2022-11-07 09:16:312 步进电机是一种可以与脉冲信号同步准确地控制旋转角度和
转速的电机,步进电机的也称为“脉冲电机”。由于步进电机
无需使用位置传感器仅通过开环控制即可实现准确的定位而
被广泛用于需要定位的设备中。
2023-01-13 10:47:30515 电子发烧友网站提供《从SD卡获取伺服电机位置.zip》资料免费下载
2023-01-31 10:17:080 伺服电机和步进电机都可以达到高精度的要求,但是伺服电机通常比步进电机具有更高的精度。这是因为伺服电机采用了闭环控制系统,可以通过实时的反馈控制,准确地控制电机的位置、速度和转矩等参数,从而保证了更高的控制精度。同时,伺服电机具有更高的响应速度和更好的动态性能,可以在更短的时间内响应和调整输出参数。
2023-03-07 15:05:094103 步进电机和伺服电机都是常见的电动机种类,它们有着不同的工作原理和应用场合。
步进电机是一种定角度运转的电动机,它的转动是根据外部提供的脉冲信号来实现的。步进电机具有精度高、控制简单、适合低速运动等特点,适用于需要高精度定位控制的场合,如印刷机、绘图仪、数码相机等。
2023-03-07 17:59:044525 步进电机是一种特殊的电动机,相较于传统的直流电机或交流电机,其具有以下几个特点:
高精度定位:步进电机可以通过控制脉冲信号来实现准确的位置定位,通常可达到0.9度或更小的步距角度,精度高于传统电机。
2023-03-08 14:17:275778 步进电机和伺服电机是两种常见的电机类型,它们的应用场景和控制方式不同,下面是它们的区别和选型方法:
步进电机是一种开环控制电机,控制信号为脉冲信号,通过控制脉冲数量和频率来控制电机的位置和运动。步进电机具有简单的控制方式、低成本和较高的精度,但通常不能提供高速运动和高负载扭矩。
2023-03-08 14:40:451257 一般情况下,伺服电机的精度要高于步进电机。伺服电机可以根据反馈信号实时调整输出的电流和位置,能够更加精准地控制位置和速度。而步进电机只能按照预设的步数和速度运转,难以在高速和负载变化的情况下保持稳定的精度。然而,在低速、低负载、短行程等应用场景下,步进电机也可以达到较高的精度。
2023-03-09 10:45:586264 步进电机是一种可以与脉冲信号同步准确地控制旋转角度和转速的电机,步进电机的也称为“脉冲电机”。由于步进电机无需使用位置传感器仅通过开环控制即可实现准确的定位而被广泛用于需要定位的设备中。
2023-03-09 11:49:321228 
基于ADRC的永磁同步电机位置环控制 原理 仿真 总结 原理 位置环ADRC: 仿真位置环内部:ESO内部:参数设置:转速环:电流环:电机参数:螺旋桨模块(查表法):此外螺旋桨加不加都可以,看情况
2023-03-14 09:33:071 下面从速度-转矩特性考虑要增加动态转矩的解决方法。增加转矩时,根据速度的高低,其解决方法各不相同。而解决方法既有电机方面的,又有驱动电路方面的。
在低速时转矩随转子齿数增加而变大。选择
2023-03-21 15:03:520 步进电机步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
步进电机收到一个脉冲,步进电机走一个步距角。
在非超载的情况下,电机的转速、停止的位置只取决于控制脉冲信号的频率和脉冲数
2023-03-22 10:42:590 步进电机基本上以开环电路驱动,用于位置控制。换句话说,步进电机以外的电机尤其是高精度的步进电机之外并没有做开环控制定位的,而用开环电路驱动的电机只有步进电机。例如无刷电机, 首先为切换相,需要测出
2023-03-22 09:47:362 广泛地应用,但步进电机并不
能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此也经
常会出现一些定位不准的故障。
2023-03-23 10:50:161 角位移量以达到准确定位的目的;同
时也可以通过控制脉冲频率来控制电机转动的速度和加速度而达到调速的目的。步进电机作为一种控制用的特种电机,因其没
有积累误差(精度为100%)而广泛应用于各种开环控制。
2023-03-23 10:34:222 步进电机基础(8.3)-步进电机的问题解决方案-改善暂态特性的解决方法 前言 基本信息 前言说明 8.3 改善暂态特性的解决方法 1. 利用阻尼器的改善 2 . 利用驱动电路的改善 (1) 半步进
2023-03-24 11:05:350 65---触摸屏控制步进电机位置实验:
硬件需求:PC机,PCM模块一个,microUSB线,5V/0.5A直流电源,12V/1A直流电
源,42步进电机1个,A4988步进电机驱动器一个,导线
2023-03-24 10:35:030 . 驱动电路的改善
(1) 额定电压(电流)驱动:
参看图6.8,从额定电压降低电压来驱动步进电机,发现位置定位精度变差。
例如:在空载时,用编码器作为负载,在额定电压(电流)时的精度与低于
2023-03-24 10:02:100 在一些自动控制领域中,步进电机的使用仍占着相当大的比例,步进电机与驱动电路组成的开环数控系统,因其简单的结构、低廉的价格和可靠的性能,目前已在很多行业中(工业自动化、医疗自动化、纺织自动化等)广泛应用。步进电机经常被用于精确定位的场合,因而保证电机不发生失步至关重要。
2023-04-15 16:33:4412518 
本篇来介绍电机的位置环控制,实现电机快速准确地转动到指定位置。回顾上篇,电机速度PID控制的结构图如下,目标值是设定的速度,通过编码器获取电机的转速作为反馈,实现电机转速的控制。再来看电机位置PID
2023-05-06 11:50:367 用于仓储、制造和服务设施的桥式起重机通常对日常运营至关重要。起重机用户要求效率、可靠性和安全性。虹科Dimetix激光测距仪作为可以定位起重机位置的传感器,它们提供高精度和可调节的非接触式测量。
2023-06-25 09:35:00285 (1)在数控机床中,伺服电机位置模式常用于驱动进给轴。通过位置模式,可以实现对切削工具的精确位置控制,以实现高精度的加工操作。 (2)在自动化生产线中,伺服电机位置模式常用于驱动定位装置、机械
2023-08-15 08:25:01484 步进电机基本上以开环电路驱动,用于位置控制。换句话说,步进电机以外的电机尤其是高精度的步进电机之外并没有做开环控制定位的,而用开环电路驱动的电机只有步进电机。例如无刷电机,首先为切换相,需要测出转子
2023-09-24 08:08:441737 
基于步进电机驱动原理,对步进电机驱动方式进行分析,提出了基于西门子S7-1200系列PLC的步进电机位置控制装置的电气系统硬件接线及软件设计。通过测试,该装置能对位置进行精确控制及状态监控,在光伏发电追光系统中可用于光伏板的控制,也适用于PLC运动控制教学实训,在自动化装置中有较好的推广价值。
2023-10-23 14:38:162584 
无磁铁双线圈技术为机器人、工业和医疗设备中使用的电机位置传感器及编码器带来高分辨率、高精度和高可靠性
2023-10-27 10:00:55538 步进系统=步进驱动器+步进电机。步进电机由步进驱动器来驱动,相当于驱动电源,且它受外部的脉冲信号和方向信号控制(这里举例是西门子PLC输出脉冲),进而控制步进电机的旋转角度和速度。
2023-10-30 11:30:52942 
步进电机是一种将电子信号转化为机械运动的电动机,广泛应用于机器人、打印机、数码相机等领域。步进电机由于其精度高、固有扭矩大、容易控制等特点,在精密定位和运动控制中起着举足轻重的作用。本文将详细介绍
2023-12-20 11:21:24768 伺服位置误差大的原因及解决方法 伺服电机是一种精密控制装置,可以实现高精度、高稳定性的位置控制。然而,伺服电机在使用过程中常常出现定位误差过大的问题。本文将从机械结构、控制系统、环境因素、测量误差
2023-12-25 13:57:521856 步进电机丢步的原因和解决方法 步进电机是一种常见的电动机类型,特点是可以实现精确的位置控制和旋转运动。然而,在实际使用过程中,步进电机有时会出现丢步的现象,即无法按照预定步长准确移动。这种情况可能会
2024-02-01 16:32:47706 控制定量的步进角度来进行精确位置控制。细分控制技术可以将电机的每个步进角度进一步划分为更小的角度,从而提高电机的精度,减小误差。 为什么需要细分步进电机? 1. 提高精度:细分控制可以将电机每个步进角度细分为更小的
2024-02-18 09:39:32700
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论