1 硬件步进电机:28BYJ-48步进电机驱动:ULN2803单片机:STC89C52 2 步进电机原理、驱动原理2.128BYJ-48步进电机实物图 图128BYJ-48步进电机实物图我给它缠了
2021-06-29 09:20:11
`大家有没有用过35步进电机?这个步进电机是两相四线的。我试了一下用ULN2003驱动,但是没有现象,不知道是我程序的问题还是驱动的问题。请问能不能用ULN2003驱动?或者还有其他的驱动方式么?`
2014-03-20 23:31:34
42两相步进电机 品 牌:锐特 产品类型 :两相步进电机 型 号:42系列两相步进电机 规 格:42CM0442CM0642CM08 极 数: 双极 额定功率:0.22N.M 耐压
2021-07-08 08:25:14
42步进电机常用有哪些驱动模块,各有什么差异
2023-10-15 11:03:11
步进电机步距角精度是什么?步距角是步进电机一个脉冲转动的角度,比如步距角是1.8°,而要转动1.2°就转不到,给出一个脉冲就转1.8°了,就差了0.6°,精度就是不够。步进驱动器有细分数,可以把步距
2021-07-08 10:05:57
步进电机失步现象及原因,关于步进电机拆开导致转子失磁步进电机拆开导致失磁,轻者运转无力,重者报废!当然也可以重新充磁。充磁需要专业的充磁机。我们如果需要拆开并防止失磁,可以做一个工具。这个工具就是一
2021-07-08 06:37:28
步进电机的步距角怎么改变 我的老机器 以前步进电机步距角是3.6度的 可是现在不好找了 怎么改下步距角才能用啊
2015-11-01 21:24:31
能够连续、平稳地转动,定子必须产生一个连续、平均的磁场。因为从宏观上看,电机转子始终跟随电机定子合成的磁场方向。如果定子合成的磁场变化太快,转子跟随不上,这时步进电机就出现失步现象。 [url
2011-02-17 09:24:31
步进电机丢步后怎么对这个丢步的脉冲进行补偿
2023-10-09 07:27:53
`步进电机驱动器是什么 步进电机驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度
2019-04-12 06:00:00
借鉴大佬文章https://moore.live/news/197355/detail/简析步进电机丢步原因步进电机的转速与脉冲频率成正比,即脉冲频率越高步进电机的转速也越高,但提高了脉冲频率虽然
2021-07-07 06:59:49
收到的脉冲数调节(也就是程序调节),这也是为什么3D打印机和激光雕刻机都需要步进电机的原因。但要注意,如果负载过大,或者供电不足,则有可能出现角度不足的情况,我们称之为”失步“,即没有达到预定控制的角度
2016-01-13 17:15:16
,转速越快,扭力越小。当然这在选型的时候很重要,不在小马拉大车。选型大一点没关系,小了或者刚好就真是不行,失步多为电机小了,机械过重,造成小马拉大车的现象。一般情况下,步进电机驱动信号脉冲多为24V串
2018-08-24 11:29:53
步进电机在控制的过程中怎么防止丢步
2023-10-12 08:07:53
应该怎么检测步进电机的丢步情况
2023-10-13 06:47:02
)广泛应用。步进电机经常被用于精确定位的场合,因而保证电机不发生失步至关重要。如果在调试过程中会发现 步进电机丢步、堵转和定位不准现象 ,遇到这种情况不要着急,更不要因此直接否定所选用步进电机,一定要冷静
2023-04-15 16:33:58
混合式步进电机(常见的1.8度、0.72度的)转子不能拿出来,否则会退磁的。除非你有充磁机重新充磁。从前听过一种说法,修理机械表头时,磁铁拿出来后要用软铁短路NS极,这样不会失磁,但是步进电机这样操作
2020-08-25 14:38:12
步进电机拆开就会失磁的原因你知道吗
2021-01-25 06:49:16
因为时间问题,本篇只介绍步进电机,下一篇会介绍配套的步进驱动器外观和结构(因为步进电机结构可以分为几类,图示只是其中一种)步进电机失一种作为控制用的特种电机,他的旋转是以固定的角度(称为步距角)一步
2021-06-28 08:18:12
3D打印机打印到一半的时候电机失步了怎么办?打印失步,开始印的时候都没问题,可是G-code里面几千个指令中,只要其中一个指令造成电机失步,整件作品就毁了。发生失步的原因,其实很简单,就是工作需要
2018-10-12 09:57:50
失步应该就是漏掉了脉冲没有运动到指定的位置。过冲应该就是和失步相反,运动到超过了指定的位置。失步和过冲现象分别出现在步进电机启动和停止的时候。一般情况下,系统的极限启动频率比较低,而要求的运行
2021-07-07 08:17:27
步进电机的步距角和步进角有什么区别?{:4_115:}
2013-04-30 10:12:55
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角
2018-10-12 11:07:38
激磁安匝数成正比,与定齿转子间的气隙有关,但过分采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音。 4、动态指标及术语: 1、步距角精度: 步进电机每转过一
2014-01-11 14:49:42
说明根据我读的《步进电机应用技术》这本书,进行的学习过程中的知识记录和心得体会的记录。6.1 静态特性 下面介绍速度-动态转矩(dynamic torque)特性的测量法。步进电机的动态转矩有最大失步转矩与起动转矩。这两种转矩随驱动频率的增加而下降,原因是由于线
2021-07-08 07:46:31
步进电机各相轮流接入整步电流后所产生的步距角叫做该步进电机的基本步距角。 F 相步进电机有 F 个绕组,这 F 个绕组要均匀地镶嵌在定子上,因此定子的磁极数必定是 F 的整数倍,因此,转子转一圈
2015-12-28 22:19:35
步进电机的转速与脉冲频率步进电机的转速与脉冲频率成正比,即脉冲频率越高步进电机的转速也越高,但提高了脉冲频率虽然达到了提速作用,却损失了力矩。力矩随脉冲频率升高而下降的原因: 步进电机产生失步的两个
2021-07-08 07:15:24
步进电机速度不够怎么办?如果是实际转速比理论转速慢,可能是失步,负载过大造成的;如果是理论上转速也是慢,那是脉冲频率低,加大脉冲频率可提高转速。提高步进电机的转速,有两个方法:1. 提高脉冲频率
2021-07-08 06:43:00
`步进电机的闭环控制最主要就是可靠性,开环有失步的风险,失步后控制系统不知道,照常发脉冲,其实机器已经失控。闭环后不会有失步现象,如果碰到冲击力矩大的,造成无法继续运转,电机会以最大力矩顶住障碍物
2018-09-05 11:02:31
是什么原因导致步进电机出现丢步
2023-10-10 06:22:47
闷头瞎搞驱动器是L298问题:1,电机只能在每分钟100转到150转之间转动,有时还失步,速度大了或小了都抖动的厉害,不转,有时响2,转的时候,扭力特小,手轻轻一碰就停,而且扭力也没有所谓的慢了大快了
2012-07-23 23:10:32
防止脉动的措施有哪些?热偏差是指什么?什么被称为压差法?
2021-07-09 07:17:17
具有过流保护功能,可限制电流以防止在发生故障时损坏电机或驱动器。总体而言,A4988步进电机驱动器是一种多功能且广泛使用的组件,适用于需要精确和受控运动的各种应用。其简单的界面和易于集成使其成为
2023-03-10 09:26:06
A4988步进电机驱动板常见问题有哪些?步进电机与直流电机控制小车的差异是什么?
2021-10-19 07:35:28
A4988如何驱动42步进电机?
2021-10-20 07:53:57
你好, 我正在评估L6470作为已停产芯片的替代品,目前已在我们的应用中使用。 我必须达到高速(2500步/秒),但是当超过800步/秒时,电机会失步。以下是我的电机特性:根据数据表: Rm
2019-02-13 16:08:15
怎么实现LPC2378步进电机转速控制??有没有例子啊
2017-12-14 15:21:54
myrio有好几个通道都能发出pwm,频率和脉宽都很容易控制。但是如果要控制步进电机走一定的步数就需要发出一定数量的pwm,那么myrio怎么发出固定数量的脉冲的。请问各位大神有什么好的思路能?
2016-04-11 21:37:45
STM32+ULN2003驱动28BYJ4步进电机的硬件有哪些?STM32+ULN2003驱动28BYJ4步进电机的驱动代码是什么?
2021-06-29 08:53:53
最近在做两轮平衡车,网上都有很多成功的兄弟,所以自己来做,用的是MPU6050(互补滤波),用stm32控制小车,电机采用的是42步进电机(A4988驱动),结果在做PID控制时,发现电机因为频繁
2019-02-12 06:36:01
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档目录文章前言一、硬件选型二、使用方法1.初始校准2.失步校准总结文章前言这里是使用的常用的STM32单片机的PWM脉冲来驱动的步进电机
2022-01-13 06:50:18
`ULN2003步进电机驱动原理及应用程序步进电机驱动原理及应用程序步进电机驱动原理及应用程序步进电机驱动原理及应用程序`
2013-07-10 16:59:38
新人求教有人做过labview做上位机,arduino做下位机控制步进电机转速、步数、正反转吗如何通过labview发送命令给arduinio控制步数呢
2016-05-24 21:55:24
tb6600步进电机驱动器说明书,Arduino控制42 步进电机 串口控制旋转位置1)描述42步进电机的驱动方式有多种,例如用A4988步进电机模块,这次我们使用TB6600驱动器驱动一个42步进
2021-07-08 09:42:03
供较高转矩输出;步进电动机的主要缺点是效率低;不能直接使用交流或直流电源,需要适当的驱动电源才能运行;带负载惯量的能力不强;在应用中可能出现低频振荡和失步的现象。03步进电机应用中的问题:步进电机一般运用
2021-09-10 08:45:23
和方向信号),但在使用性能和应用场合上存在着较大的差异。现就二者的使用性能作一比较。1.控制精度不同两相混合式步进电机步距角一般为1.8°、0.9°,五相混合式步进电机步距角一般为0.72°、0.36
2017-07-02 10:51:52
能力;运行性能:步进电机为开环控制,启动频率过高或负载过大可能失步或堵转,伺服电机为闭环控制,一般不会出现失步或过冲现象,控制性能更可靠;速度响应性能:伺服电机的响应速度远快于步进电机
2016-08-19 22:01:04
。这应该可以解释步进电机“失步”的现象,当输入频率升高后,电机输出减少,响应就跟不上了,于是就出现了“失步”。可以看到从1KHz开始,频率再高,电机实际输出的扭矩就开始减小了,不妨称其为“截止频率
2016-01-18 14:07:53
为什么步进电机改变运动方向就容易出现丢步的情况
2023-10-09 08:17:25
五步曲教你步进电机选型 这里用五步教大家对步进电机选型,避免大家对步进电机选型错误带来各种各样不必要的麻烦。 第一步:步进电机的保持转矩,相当于传统电机所说的“功率”。当然,他们有着本质的区别。步进
2016-01-18 11:38:08
可以把它驱动起来的,以下是我买的一个步进电机驱动模块。步进电机选用的是:28BYJ48-H12这里在软件编程上有一个比较重要参数需要了解一下,就是步距角。那么什么是步距角呢?度娘给你答案,可...
2021-07-08 07:27:17
1.步进电机失步概念步进电动机正常工作时,每接收一个控制脉冲就移动一个步距角,即前进一步。若连续地输入控制脉冲,电动机就相应地连续转动。步进电动机失步包括丢步和越步。丢步时,转子前进的步数小于脉冲数
2021-07-07 08:00:55
离散的,逐步的运动使步进电机具有精确的定位能力,这也可能导致某些不良的性能特征,即由于共振而引起的振动和可听见的噪声。 步进电动机由于转子的惯性而在每一步中自然会表现出较小的振动,这会导致
2023-03-10 09:48:47
伺服电机和步进电机的区别是一、控制精度不同两相混合步进电机距角一般为3.6°、 1.8°,五相混合步进电机步距角一般为0.72 °、0.36°。也有一些高性能的步进电机步距角更小。如四通公司生产
2018-09-04 10:08:37
A4988步进电机驱动器的控制模式有哪几种?使用A4988步进电机驱动器有哪些注意事项?
2021-12-20 06:46:04
使用Arduino和A4988步进驱动器模块控制NEMA 17步进电机ARDUINO项目经过**阿什什·乔杜里(Ashish Choudhary)** 2019年9月10日修改用Arduino和电位计控制NEMA 17步进电机步进电机是一...
2021-07-08 07:37:47
应该是·由于点击反复启停造成的)。还有一个问题是我的步进电机是带减速器的,5.18:1,我想知道这个值是怎么产生的,这种比例无法算出准确的步距角啊。还有有时候根据给定值算出的步距角与实际转动步距角有较大误差,是因为频率过高,造成的失步现象严重造成的吗?
2015-07-25 11:30:05
,速度和力矩的闭环控制;克服了步进电机失步的问题;2、高速性能好,一般额定转速能达到2000~3000转;3、抗过载能力强,能承受三倍于额定转矩的负载,对有瞬间负载波动和要求快速起动的场合特别适用;4
2018-08-28 15:36:30
[导读] 大家好,我是逸珺。今天想分享一种超级实用的步进电机调速算法,这种算法在步进电机调速方案中可以说是一种非常优异的方案。梯形调速算法为啥需要设计一个调速算法呢?步进电机不是给多少脉冲就动多少步
2021-09-03 09:05:44
如何使用Arduino开发板和DRV8825步进模块控制NEMA17步进电机?
2021-10-28 07:06:54
步进电机是一种直流电机,它可以步进方式工作,从监控摄像机到复杂的机器人,无处不在。 NEMA 17步进电机的步进角为1.8°,这意味着它需要200步才能进行360°旋转。通过改变施加的控制信号的速率
2021-08-31 07:25:35
42步进电机的特点有哪些?如何利用STM32F103C8T6去控制42步进电机呢?
2021-12-20 07:37:19
TMC5160步进电机有哪几种模式呢?如何去实现TMC5160步进电机的简单转动呢?
2021-12-20 07:48:19
DRV8825步进电机的控制要领有哪些?如何去控制DRV8825步进电机的方向及转动呢?
2021-12-21 07:14:09
和稳定性。
失步检测与保护:模块具备Stallguard4失步检测专利技术,能够实时监测步进电机的运行状态,一旦发现失步现象,立即采取相应的保护措施,防止设备损坏。
节能与静音:TMCM-1290采用
2024-03-10 20:44:08
如何正确选择步进电机?选择步进电机要考虑哪些因素?
2021-10-08 06:01:07
步进电机一般参数有步距角、步距角精度、电阻精度、电感精度、温升、环境温度、绝缘电阻、耐压、径向间隙、轴向间隙、径向最大负载、轴向最大负载。其中步进电机里面的步距角到底是什么呢? 步距角它表示
2016-01-19 09:10:22
VID6606步进电机是什么?VID6606步进电机的功能和特点有哪些?如何用AVR单片机控制VID6606步进电机去驱动VID29?
2021-09-22 07:48:25
一定的误差,但是,步进电机每转一周的步数相同,在不失步的情况下,其步距误差不会长期累积。 上面提到的都是在不失步的情况,如何才能避免失步呢?首先我们需要知道造成电机失步的因素: 1、转子加速度慢于步进
2016-07-28 16:13:35
什么叫失步呢?带编码器的步进电机它有什么好处呢?
2021-07-13 08:04:47
,通常是根据大部分使用工况下,步进电机可以承受的温升设定的,而驱动电流过大或过小,可能都会对步进电机造成一定的影响。 3、静力矩 步进电机的静力矩是指两相线圈通额定电流,电机不转时,锁定的转矩,一定程度
2023-03-10 10:33:09
怎么实现STM32步进电机的加减速?
2021-10-19 09:55:56
间的牵引力减小,不足以拖动负载,由于转子与定子产生转差,转子绕组切割定子磁场,进入异步运行状态,造成定子电流增大,转子绕组过热、开焊,甚至烧毁,电机振动,损坏电机绕组和励磁装置。 为防止同步电机失步
2023-03-07 15:11:53
求助关于步进电机转很小角度会失步回撤问题自己做的一个项目中需要控制步进电机转固定小角度,例如15、30度的。用的步进电机步距角是15度,用A3979驱动器驱动,采用16细分,这样算下来转一圈需要
2021-06-29 06:56:08
步进电机为什么无法高速启动?步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率
2021-07-08 07:03:04
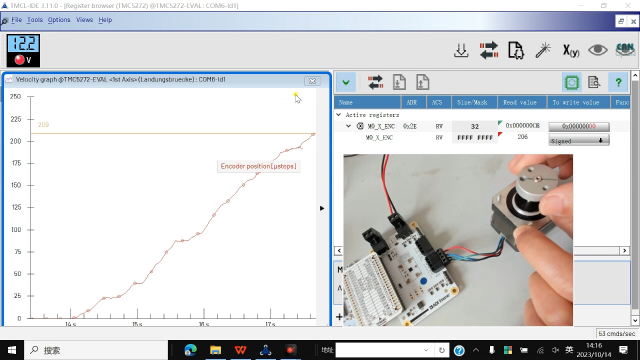
和噪声困扰的难题,Spreadcycle高速度高动态电流控制,解决常规步进电机高速容易堵转,高速上不去的问题。TMC5272和TMC5271还带有不需要编码器情况下编码失步,其中Stallguard
2023-10-22 11:41:32
目标:用步进电机驱动器驱动42步进电机,并精确控制脉冲个数。步进电机器如下图:第一步 STM32CubeMX配置TIM2_CH1,并生成代码。TIM2的NVIC也要打开,如图:第二步 :在生成的代码
2021-09-16 06:02:55
本帖最后由 eehome 于 2013-1-5 10:04 编辑
电磁干扰和防止措施
2012-08-04 16:48:24
请教一下大神伺服电机失步时是怎样得到补偿的?
2023-03-23 15:34:44
tb6600步进电机驱动器对步进电机的脉冲宽度的影响?
2021-10-28 06:41:36
几个小招轻松教你解决伺服电机的失步问题有时候电机会发生失步,下面是失步的几个解决方法: 1、检查电机是否存在干扰或伺服本身参数没有设置恰当导致。 2、确认伺服马达接收脉冲数(A5系列
2016-01-13 14:25:00
伺服电机与步进电机相比有哪些优势?选择伺服电机要考虑哪些因素?
2021-09-29 06:07:32
概述:一款即支持S/D脉冲控制,又支持RS485总线控制,体积小巧,主要用以42步进电机的驱动控制器。参数:电压:9-28V电流:1.4A微步细分:256内插细分只支持RS485、S/D脉冲控制
2022-09-26 17:56:35
步进电机产生共振是因为电机接收的脉冲频率等于步进电机的固有频率,该频率与驱动器的细分有关系。
2018-09-14 08:43:00 9061
9061 首先,步进电机每转步数与步进角的存在一定的关系。这些参数值可以从我们的步进电机筛选条件进行筛选。
2023-05-11 09:42:31499 
步进伺服电机的运动精度与以下几个因素相关: (1)步进角度:步进电机的步进角度决定了每一步的旋转量。通常,步进电机的步进角度为1.8度或0.9度。较小的步进角度可以提供更高的分辨率和更精确的位置控制
2023-07-14 08:45:01493
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论