目前已经开发出了多种类型机器人机构,运动自由度从3自由度到7或8自由度不等,其结构有串联、并联及垂直关节和平面关节多种。目前研究重点是机器 人新的结构、功能及可实现性,其目的是使机器功能更强、柔性
2015-09-26 14:13:00 1119
1119 继上篇17自由度人形机器人安装部分后上传做好的功能演示优酷链接:http://v.youku.com/v_show/id_XMTMwMjAzNDUyNA==.html?from=y1.7-1.2
2015-08-05 19:14:59
`分享给大家我自己做的四自由度机械手`
2015-09-09 09:27:35
四足机器人属于复杂机电系统,需要综合生物、机械、电子、控制等学科内容,具体涉及仿生机构设计、灵巧运动机构设计、高性能驱动器制造,行走稳定性控制、强化学习等在内的多个研究方向。其中,机构设计是保障四足
2021-09-15 06:54:01
机器人的运动原理还是属于最基本的简单机械。机器人运动主要是依靠什么装置?有些什么装置是机器人用的比较多的?
2015-02-03 11:22:01
,包含六自由度工业机器人、智能视觉检测系统、PLC控制系统及一套供料、输送、装配、仓储机构,可以实现对高速传输的
2021-07-01 08:20:18
。 1、自由度 机器人具有的独立坐标轴运动的数目。机器人的自由度是指确定机器人手部在空间的位置和姿态时所需要的独立运动参数的数目。手指的开、合,以及手指关节的自由度一般不包括在内。.机器人的自由度
2017-08-15 14:00:52
机器人来完成这些工作,不仅提高了工作效率和产量,还提高了产品质量和经济效益。作为例子本文就介绍标准码垛机器人MS600。 一、MS600的组成 MS600主要由一个供料机构,一个下料机构,托盘搬运
2020-07-29 08:09:46
``力泰科技资讯:码垛机械手作为工业码垛机器人的重要组成部分之一,可根据不同的产品,设计不同类型的机械夹抓,从而让码垛机器人具备效率高、质量好、适用范围广、成本低等优势,并能很好地完成码垛工作。夹抓
2018-08-15 09:55:44
在这个以智能化为标志的时代,在生产作业过程中使用机器人已经是越来越普遍的现象了。对于纺织企业来说,码垛机器人恰巧可以帮助他们解决包装、搬运、码垛、装车、入库等实际问题,让他们在生产流程上更加
2016-01-20 14:09:40
用较大的库房面积。同时码垛机器人可以设置在狭窄的空间里。 6.耗低。通常机械式的码垛机的功率在26KW左右,而码垛机器人的功率为5KW左右。大大降低了客户的运行成本。
2021-02-23 17:10:49
ZN-IRB01ABB机器人实训平台一、概述ZN-IRB01ABB机器人实训平台包含六自由度工业机器人、传感器检测系统、PLC控制系统及一套供料、输送、压铸、焊接机构,可以实现对传输的工件进行码垛
2021-07-01 08:57:20
对不同物料进行快速的检测、组装。为了方便实训教学,系统进行了专门的设计,可以完成各类机器人单项训练和综合性项目训练,可完成各类机器人单项训练和综合性项目训练。可以进行六轴机器人示教、定位、抓取、装配等训练,ZN-980B机器人搬运码垛工作站包含六自由度工业机器人、智能视觉检测系统、PLC控制系统及一套供料、输送、装
2021-07-01 12:48:23
行走机构。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号
2010-05-18 22:03:02
相比于之前的机器人,NAO机器人穿上人类的服装,那就像是一个真人出现在我们面前似得,NAO机器人的四肢设计的非常的灵活,具有多个自由度的身体,使得NAO机器人能够灵敏的行走以及参加一些活动。NAO
2015-02-13 15:43:24
传感器。四足机器人重2.2kg,有8个自由度,四条腿上都搭配了足底传感器。其他零件由3D打印和现成的零件构成,可以做出重量轻且低成本的机器人,这也使得其他研究团队可以快速开发和复制此项目。本文系统地描述了
2021-09-13 06:33:53
项目名称:渔业卫士-基于图像识别的多自由度水下机器人试用计划:1、申请理由希望早日接触、应用国产的鸿蒙系统。2、项目名称渔业卫士-基于图像识别的多自由度水下机器人3、计划(1)约三个月时间,应用该款
2020-09-25 10:11:50
申请理由:运动控制卡是伺服控制系统的核心,在数控机床、机器人等领域有着重要的应用。广泛的应用。项目描述:本项目设计了基于PCI总线的低成本、开放式可同时控制四轴交流或直流伺服电机的运动控制卡。该运动
2015-10-29 14:14:42
,原地旋转等动作。二、项目设计原理整个系统分为机械结构,硬件电路。软件程序和上位机四大模块。1.机械结构机械结构主要问题在于机器人自由的分配,一个舵机可以完成一个自由度。本作品的六个自由度如下分布
2014-01-02 14:31:52
ZNRX-J2型 工业机器人柔性自动化生产线实训系统一、设备概述工业机器人柔性自动化生产线实训包含多台六自由度工业机器人、PLC控制系统,工业机器人在测量检验、包装、分拣处理、搬运、码垛、填装、机器
2021-07-01 13:07:55
工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。工业
2015-01-19 10:58:38
龙人四足机器人是一种仿生机器人,由Openduino控制板控制,有四条腿,每条腿两个自由度,由两个舵机驱动,能实现两种步态行走。配有三个超声波,实现大角度智能避障。标准演示程序有5个可爱的表演动作。重要技术点: 四足机器人的行走步态设计、舵机的梯形速度控制、多路舵机的协调控制
2016-03-24 16:17:53
)速度空间范围不同:如图 4.1所示,在之前的文章《两轮差速驱动机器人运动模型及应用分析》中对两轮差速驱动机器人的速度空间做了分析,其只有2个自由度,不能沿着机器人坐标系Y轴运动,所以速度空间是一个矩形平面,效果如图 4.1(a)所示;而基于上述分析可知,全向轮平台有3个自由度,既可纵向、横.
2021-08-30 09:15:18
最近在参与一个六个自由度座椅控制的课题,需要查阅哪些方面的相关书籍,有什么推荐吗?谢谢各位
2017-01-13 14:46:46
是很有用处的,因为运动干涉很容易处理。六个自由度是具有完成空间定位能力的最小自由度数,多于六轴的机器人,统一称为冗余自由度机器人。与传统的6关节机器人相比,7关节机器人可以以多角度伸展机械臂接近一个特定
2018-10-12 11:02:18
、搬运或其他动作的多自由度机械手臂。 相对于单轴机器人,多轴机器人有更多的自由度,可以在一定的空间内自由运动,完成几乎任何角度和轨迹的运动作业,而更多的关节意味着它可以从任意角度拿取工件,而不像单轴
2017-11-23 10:17:45
研究的前沿,它在一定程度上代表了一个国家的高科技发展水平。运动控制系统是机器人控制技术的核心,也是机器人研究领域的关键技术之一,在机器人控制中具有举足轻重的地位,因此,各研究机构都把对机器人运动控制系统的研究作为首要任务。
2020-08-19 06:57:09
。 四自由度机械臂机械系统 本文讨论的四自由度机械臂面向中小型物流系统应用。其基本的设计要求为:实用、有相对大的作业空间、抓取重量不小于2.5kg、具有不大于10mm的重复定位精度、自重轻、外观整洁
2015-02-12 16:10:04
一前言针对机器人相关专业的教学需求,商飞信息科技开发出此开源六自由度协作机器人实验平台。该平台有以下几大特色机器人本体采用自主设计的3Kg负载六自由度协作机器人,机器人每个关节集成电机、减速器和驱动
2021-09-07 07:10:14
六自由度Stewart并联运动平台模型-X,Y,Z平移、旋转测试六自由度Stewart并联运动平台-Z向旋转正弦波复现六自由度Stewart并联运动平台-Z向平移正弦波复现
2014-04-16 23:25:51
工业生产中,传统的工业机器人在生产适用性上已经不能满足日益增长的多任务需求,多轴机器人顺势发展,趋势明显。多轴机器人是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系
2020-07-29 06:57:04
?举例: 工业机器人系统由三大部分六个子系统组成,1、三大部分是:(1)机械部分(2)传感部分(3)控制部分2、六个系统(1)驱动系统,要使用机器人的运行起来,就需给各个关节即每个运动自由度安置
2016-03-06 12:56:19
、抓取、装配、入库等训练,2、工业机器人与视觉实训平台包含六自由度工业机器人、智能视觉检测系统、PLC控制系
2021-07-01 06:38:35
机器人1、机器人本体1)具有6个自由度,串联关节型工业机器人;2)重复定位精度:±0.01mm;3)承重能力:3kg;4)水平到达距离: ≥580mm;5)重量: ≥27kg;6)各轴运动范围J1轴≥±180J2轴≥-155°/+5°J3轴≥-25°/+240°J4轴≥±180°J5
2021-07-01 11:06:26
工具(如焊枪、喷嘴、机加工刀具、夹爪)与主构架的连接机构,它具有3个自由度。 驱动系统为机器人各运动部件提供力、力矩、速度、加速度。 测量系统用于机器人运动部件的位移、速度和加速度的测量。 控制器(RC
2015-01-19 10:36:12
)对给定机械臂,己知各关节角矢量g(f)=[gl(t),g2(t),......gn(i)]',其中n为自由度。求末端操作器相对于参考坐标系的位置和姿态,称之为运动学正问题。在机器人示教过程中。机器人
2017-12-15 10:25:19
可以在矿山、深海等恶劣环境代替自然人进行工作,还可以进入人们的日常生活提供服务,甚至成为人们的朋友。 在工业机器人领域,机器人的定义已悄悄地发生了变化,不再局限于固定式的双自由度机械手或三自由度机械手
2015-02-03 10:51:09
必须考虑的问题。机器人的主要技术参数有自由度、分辨率、工作空间、工作速度、工作载荷等。1、自由度机器人具有的独立坐标轴运动的数目。 机器人的自由度是指确定机器人手部在空间的位置和姿态时所需要的独立运动
2018-10-12 10:16:22
0、前言试着推导并实现四自由机械臂的运动方程,在此处使用拉格朗日法进行。系统机构图如下:注:第一个关节是圆柱转盘,其他关节绕枢轴点转动。其中Tm为关节驱动力矩,由电机提供;b*theta_d为粘性
2021-09-15 06:50:30
` 本帖最后由 疯壳科技 于 2018-7-4 15:06 编辑
开源可编程蓝牙心率运动手环开发文档资料MTK定位电话手表开发文档资料100%开源多自由度人形街舞机器人开发文档资料开源可编程蓝牙
2018-04-28 17:43:31
教育机器人搬运码垛套件采用Openduino龙人宝贝机械手完成不同色块的搬运码垛任务。Openduino龙人宝贝机械人手由两轮差动移动平台和四自由度机械手的组成,能够方便地外扩各种传感器,完成各种搬运码垛作业任务。机器人采用框架结构,拆装方便。
2016-03-29 10:22:15
导航,前置超声波传感器对料块进行方向和距离定位,安装在手爪的颜色传感器识别料块颜色进行分类,三自由度机械手完成码垛任务。重要技术点: 机器人循线、机械手运动控制、超声波测距定位和颜色识别。`
2016-04-01 14:18:48
舵机云台二自由度运动;3.4 发射器控制1 开发阶段功能分析属于开发早期阶段,在设计具体的软件架构之前,确定...
2021-08-18 06:14:07
,各机器人行走轴由重载铝型材、滚轮直线导轨和伺服电机等组成。作为运动框架和载体的重载铝型材其截面形状通过有限元分析法来优化设计,生产中的精益求精确保其强度和直线度。工业应用中,能够实现自动控制的、可
2020-11-30 09:44:15
我们设计的四自由度机器人走一定距离会走偏,要求走四米的直线,偏差不能超过五厘米,而且还要转弯后继续走直线,请问有什么比较好用的传感器可以既节省时间又可以让行走偏差缩小。
2014-08-15 15:49:53
汽车驾驶模拟器二自由度运动系统
2012-08-06 13:06:11
总线数据采集卡为硬件基础,利用Vc++6.0 设计机器人控制界面, 实现该机构的连续轨迹运动。1 新型五自由度并联机器人机构原理研究的并联机构如图1 所示。A1~A4、B1~B4 为球副, R1~R8
2019-06-02 08:00:00
LabVIEW8.2的强大功能,我们得以在短时间内完成了控制系统的开发,同时保证了机械臂的运动精度与负载能力。四自由度机械臂机械系统 本文讨论的四自由度机械臂面向中小型物流系统应用。其基本的设计要求为:实用、有
2019-05-06 09:26:38
以六自由度模块化机器人为对象,利用D-H坐标变换方法进行运动学分析,计算出各杆之间的齐次坐标变换矩阵,建立求解机器人逆运动学问题的两种模型。并根据两种模型应用vc++
2009-08-05 11:34:32 14
14 通过介绍目前喷涂机器人的研究现状,引出在工业级计算机IPC 与运动控制卡的平台上研制六自由度喷涂机器人的可行性。在参考其它工业机器人的示教检查的基础上,本文提出符
2009-12-19 15:27:5118 主要研究了基于新型正交六自由度并联机构设计的仿生型机器马系统的运动学特性。首先分析了机器人的逆运动学方程,然后设计了模糊自适应PID 控制器,最后给出了动平台做一
2009-12-31 15:50:339 深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。-
2023-04-19 09:22:29
中图仪器牵头的国家重点研发计划——“六自由度激光自动精准跟踪测量关键技术"的项目综合绩效评价会议在深圳顺利召开。本项目瞄准我国航空航天、汽车船舶、轨道交通、机器人、核电、大科学装置等装备制造领域
2023-10-27 11:27:00
以六自由度模块化机器人为对象,利用D-H坐标变换方法进行运动学分析,计算出各杆之间的齐次坐标变换矩阵,建立求解机器人逆运动学问题的两种模型。并根据两种模型应用vc++程
2010-07-20 15:33:4924 为了实现复杂的运动与导航控制,需获取控制对象的空间姿态信息,设计了基于四自由度(4DoF)IMU惯性测量传感器和C8051F330单片机的姿态测量系统。介绍了ADIS16300惯性测量传感器的
2010-07-21 15:25:1123 三自由度的机械爬虫的运动原理随着科学的发展,智能机器人在不知不觉中,逐步代替人类从事危险的工作,完成困难的任务:从深入火场救人,到探索无尽
2009-03-06 20:26:141981 
机器人机构!资料来源网络,如有侵权,敬请见谅
2015-11-20 15:33:220 工业机器人领域的典型设计,本文通过对多自由度的机器人运动控制进行典型的分析研究。
2016-05-25 14:03:399 19自由度机器人_动作例程,感兴趣的小伙伴们可以瞧一瞧。
2016-11-17 18:35:231 6自由度机器人 双足竟步机器人研究报告 加代码
2017-04-10 11:19:1266 仿人机器人 THBIP-I及其步态 (HumanoldrobotTHBIP,Iandits@alkinggait) 清华大学 自主研制的仿人机器人 呻 IP--重约 130kg,高 172cm
2017-09-16 09:14:598 什么是工业机器人的自由度? 通常作为机器人的技术指标,反映机器人动作的灵活性,可用轴的直线移动、摆动或旋转动作的数目来表示。机器人机构能够独立运动的关节数目,称为机器人机构的运动自由度,简称自由度
2017-09-26 16:06:253 目前已经开发出了多种类型机器人机构,运动自由度从3自由度到7或8自由度不等,其结构有串联、并联及垂直关节和平面关节多种。目前研究重点是机器人新的结构、功能及可实现性,其目的是使机器功能更强、柔性更大
2017-10-16 16:30:2211 本论文以螺旋理论为基础,提出一种系统的结构综合方法。根据各条支链对运动平台所提供的反螺旋约束的线性关系,研究了构成五自由度并联机器人机构的各条支链所有可能的运动副组合以及它们的空间几何条件。利用这一方法,设计出一组结构对称的五自由度并联机器人。
2017-10-17 14:51:586 理想的少自由度并联机构的所有分支最好具有完全相同的结构,保持结构的对称,以满足各向同性的要求。以单开链支路为单元,提出了一种新型的对称的少自由度的并联机器人机构。研究结果表明,该机构的运动平台具有
2017-10-23 16:24:5015 针对假肢自动化测试不可重复性和可能对测试病人造成的不安全问题,本文设计了一种基于两自由度髋关节运动和MSP430单片机的机器人假肢控制系统。设计的机器人可在矢状面平面重复两个自由度臀部运动,将跑步机
2017-11-10 10:21:359 对机器人进行相应的优化设计可以使机器人具有更好的结构性能与工作性能。以一种三自由度冗余驱动混联机器人为研究对象,对该机器人尺寸参数无量纲化并分析该机器人可达的工作空间,进而在混联机器人工作空间中找出
2018-01-05 14:24:191 已有的三自由度Delta机器人为研究对象,按照其结构参数使用三种方法进行工作空间的仿真,对仿真结果进行对比分析,用实验室实物测量的数据进行验证。结果表明:三种仿真方法得到的工作空间相同,说明三种仿真方法都是可行的,其中基于Matlab位置正解法的仿真方法
2018-01-05 16:13:291 机器人机构能够独立运动的关节数目,称为机器人机构的运动自由度,简称自由度(Degree of Freedom),由DOF简写表示。
2018-01-17 10:03:2011466 积累和放大、位置反解容易等优点, 与串联机构在应用上形成了互补关系。目前, 对并联机器人研究较多的是6 自由度( 6DOF) 并联机器人, 但在某些场合2~5 个自由度即可满足使用要求, 这类少于6 自由度
2018-10-07 10:57:005510 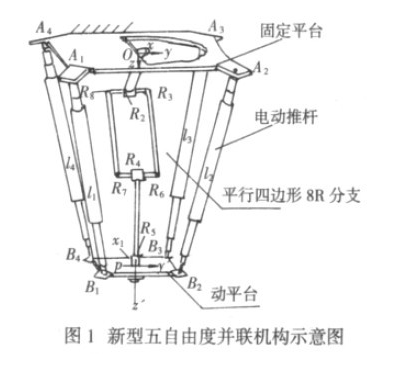
近几十年来,随着我国经济持续发展及科学技术的突飞猛进,码垛机器人在码垛机、弧焊、喷涂、点焊、搬运、涂胶、测量等行业有着越来越广泛的应用。码垛机器人是一个在三维空间中具有较多自由度,并能实现诸多拟人
2018-12-01 23:48:14543 现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。
2019-03-17 09:23:0225892 现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。
2019-04-10 13:49:5310535 六自由度运动平台是典型的并联运动机构,由六支作动筒,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支作动筒的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
2020-03-07 16:54:001244 6自由度双足机器人是模仿人类的下肢运动制作的机器人。使用了3对舵机,分别模仿人体下肢的臀关节、膝关节、踝关节。
2020-03-12 15:49:0012 本文对双足竞步机器人机械结构、控制系统进行设计并对其步态规划进行研究,成果成功应用于全国机器人大赛双足竞步机器人项目竞赛中。 首先,对双足竞步机器人的自由度进行配置;根据自由度的配置把机器人的机械
2020-03-24 16:29:0012 本文对一种新型的二自由度并联机器人进行分析。机器人可以放置在一个固定方向的平面刚体。首先详细介绍了机器人的运动结构,然后分析了一些运动的问题,如正向和逆向的运动学,速度,和奇异点。对工作和装配
2020-03-26 16:27:297 必须能够在空间任意移动和保持任意姿态,因此需要6个自由度。从运动学的观点看,在完成某一特定作业时具有多余自由度的机器人,叫做冗余自由度机器人,又叫冗余度机器人。例如,6自由度机器人去执行印制电路板装配作业就是一个
2020-06-04 08:00:004 码垛机按智能化水平分为机器人码垛机和机械式码垛机两种。 按行业可分为:食品饮料行业码垛机器人、水泥自动装车码垛机器人、工业品码垛机器人等。 机器人码垛机一般分为线性运动起重机式码垛机器人、机械
2020-08-29 10:11:344017 有4轴或6轴,是可以自动控制,重复编程,并多自由度多用途的操作机。码垛机器人工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。 以XYZ直角坐标系统为基本模型,以伺服电机、步进电机为驱动的单轴机械臂为基本工作单元,以滚珠
2020-09-02 10:52:571465 坐标机器人的技术特点: 1.自由度运动,每个运动自由度之间的空间夹角为直角 2.自动控制的,可重复编程,运动均按程序运行 3.一般有控制系统、驱动系统、机械系统、操作工具等组成。 4.灵活,多功能
2020-10-26 14:16:451376 码垛机器人相对于传统的码垛机而言,效率、功能、自由度更高,且易于维护。腾阳为各种类型的包装和码垛作业提供对应的关节机器人,他能很方便的集成在任何生产线中,并很好的处理纸箱、塑箱、瓶类、袋装桶装等物料
2020-11-06 17:27:29657 可码垛400-800次,适用于码垛袋装、箱装、灌装、瓶装等包装物。 坐标机器人码垛机是机电一体化高新技术产品,它有4个自由度,自由度越高,发挥的作用越大,可以按照要求的编组方式和层数,完成各种产品的码垛,使垛型紧密、整齐。码
2020-11-26 12:33:15814 ADIS16305:精密四自由度传感器过时数据表
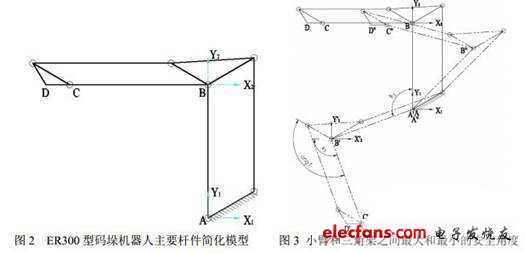
2021-05-09 15:47:293 基于码垛任务的实际需要,码垛机器人通常具有四自由度。与一般垂直型六自由度串联工业机器人的结构不同,码垛机器人通过在肩部串联两个平行四边形结构使得腕关节旋转轴一直与地面垂直,从而使被抓持物处于水平状态;码垛机器人本体分别在垂直和水平方向上的大码垛范围,是衡量码垛机器人工作性能的重要参数。
2021-05-31 15:18:122100 码垛机械手臂主要由执行机构、驱动机构和控制系统三大部分组成。高速码垛机器人机械手臂是一种多自由度的全自动关节式机械手,其机械系统主要由4个关节部分组成能实现4种运动,基座旋转、连杆结构的手臂结构前后和上下运动、手腕回转动作与手爪的伸缩和抓取运动并由交流伺服电机驱动。
2021-08-23 16:44:491463 随着物流、食品和化工等行业的不断发展,码垛机器人发挥着越来越重要的作用,它不只可以准确、有效地完成码垛作业,而且可以降低工人的劳动强度,提高生产效率,是面向工业领域的多关节机械手或多自由度的机器人。码垛机器人的维护与保养需要注意些什么呢?
2021-10-08 10:47:482975 直角坐标机器人是工业机器人中的一种,在工业应用中,能够实现自动控制的、可重复编程的、运动自由度包含三维空间正交平移的自动化设备。也称桁架机器人或龙门式机器人,其工作的行为方式主要是通过完成沿着
2022-01-18 13:37:35762 提出一种用于物流系统的5自由度移动机器人系统,并对系统组成与功能进行了详细讨论。该系
统机械臂由一种简洁高效的新型钢丝绳传动机构构成——行星‘8字形缠绕方式,整个结构紧凑高效,在减轻质最
的同时
2022-09-13 15:01:480 主体,即是机座和执行机构,包括臀部、腕部和手部,有些机器人还有行走机构。大多数工业机器人有3-6个运动自由度,其中腕部通常有1-3个运动自由度
2023-01-05 11:59:162349 工业机器人自由度一般分为4个自由度,或者6个自由度,关节机器人主要是模仿人的手臂进行设计的。
2023-03-16 12:20:301656 主体 - 即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3-6个运动自由度,其中腕部通常有1-3个运动自由度;
2023-03-24 12:23:40811 主体 - 即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3-6个运动自由度,其中腕部通常有1-3个运动自由度;
2023-04-20 12:41:35493 机器人模块中集成了一个拥有6自由度的高效机器人核心,在路径规划中,通过PLC-Open Part 4确保了最高自由度,同时仅通过调整参数就能非常方便地完成取放运动,无需机器人方面的专业知识。
2023-04-21 11:26:07268 随着机器人变得日益成熟,它们已经能够应用到处理越来越多的工业工序。6自由度(6Dof)机器人能够执行复杂的动作,因而可以在许多复杂的工业任务当中展示良好的性能,比如码垛、搬运、涂胶和焊接等。6自由度机器人可以提举和灵活地操纵重型载荷,并通过复杂的几何运动对载荷进行精确操控。
2023-05-18 17:34:21721 
杂乱环境及有害环境下操作以维护人身,因而码垛机器人在许多范畴都有着广使用。因而码垛机器人定要取代人力劳作。 全自动码垛机器人主要由机械主体、伺服驱动系统、手臂机构、末端执行器(抓手)、末端执行器调节机构以及检测机构
2023-08-29 14:33:05473
 电子发烧友App
电子发烧友App















 工商网监
工商网监
评论