 电子发烧友App
电子发烧友App


基于3G技术的浮动车交通信息采集系统研究
0 引 言
近年来,第三代移动通信技术(3G)已经在世界上有些国家成功商用,在不同的环境条件下,它能够提供384 Kb/s~3 Mb/s的传输速度,这样的速率足以胜任传递交通信息的要求,因此通过3G移动通信技术更能实现交通信息的交互和实时传递。浮动车信息采集是伴随着ITS新技术应用而在近几年发展起来的一种交通流信息采集技术,浮动车技术研究已经成为我国智能交通系统(ITS)的热点。
本文从分析浮动车信息采集系统功能人手,提出了基于3G数字移动通信技术的浮动车信息采集的一种新的解决方案。
1 浮动车信息采集系统功能
浮动车辆通常是指装有定位和无线通讯装置的车辆,其所采集的数据一般包括时间、位置坐标、瞬时速度、行驶方向、运行状态及其他内容。浮动车交通信息采集是指通过采集浮动车辆运行数据并进行分析处理,将其应用于交通信息服务、交通管理和停车诱导等方面。浮动车交通信息采集系统主要实现功能如图1所示。

1.1 浮动车交通流数据采集
浮动车辆交通流数据采集是指浮动车量通过GPS定位装置等,采集运行数据并通过无线通讯网络将运行数据传回信息控制中心。为了能够建立有效的、系统性的交通流运行数据,必须确定浮动车数量规模、采集频率和传输频率等参数。
1.2 交通流数据处理
交通流数据处理是指采用地图匹配方法将浮动车采集到的车辆数据与数字电子地图数据库中的道路信息进行比较,通过一定的匹配算法确定出车辆可能的位置和最可能的行驶路段。浮动车地图匹配算法是系统设计关键之一。
1.3 路段交通流状态分析
交通流分析是在地图匹配基础上估算路段旅行时间和平均速度,通过路段旅行时间和平均速度估算的结果与预先设定的阈值比较,判断路段畅通、拥挤、堵塞等不同状态,并将路段的实时交通流状况显示在电子地图或可变情报板上,从而为交通服务、交通管理和出行者提供实时直观的交通状态信息。
1.4 信息无线传输
信息无线传输是指以无线接入网(RAN)和分组交换公共数据网(Packet Switched Public DataNetwork,PSPDN)之间的网关实现浮动车采集信息的互传。无线互连除了能够实现数据的高速传输功能外,车辆驾驶员还能够通过它接人Internet,随时随地收发电子邮件和娱乐等。
2 基于3G技术的浮动车信息采集系统设计
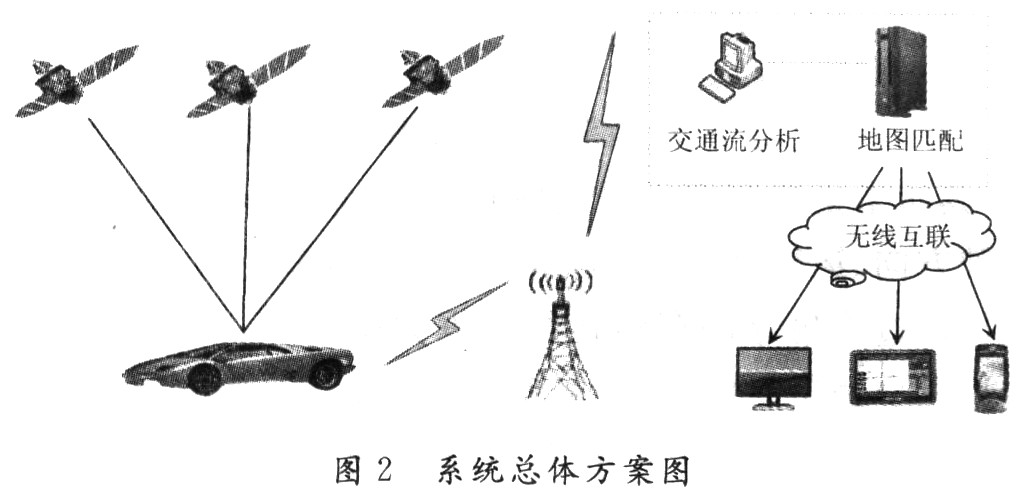
根据以上浮动车信息采集系统应具备的功能分析,本文提出的基于3G移动通信技术浮动车信息采集系统由浮动车数据采集、地图匹配、交通流分析和3G无线互联网络四个子系统组成,系统网络总体方案如图2所示。系统各子系统设计分别阐述如下。
2.1 数据采集子系统
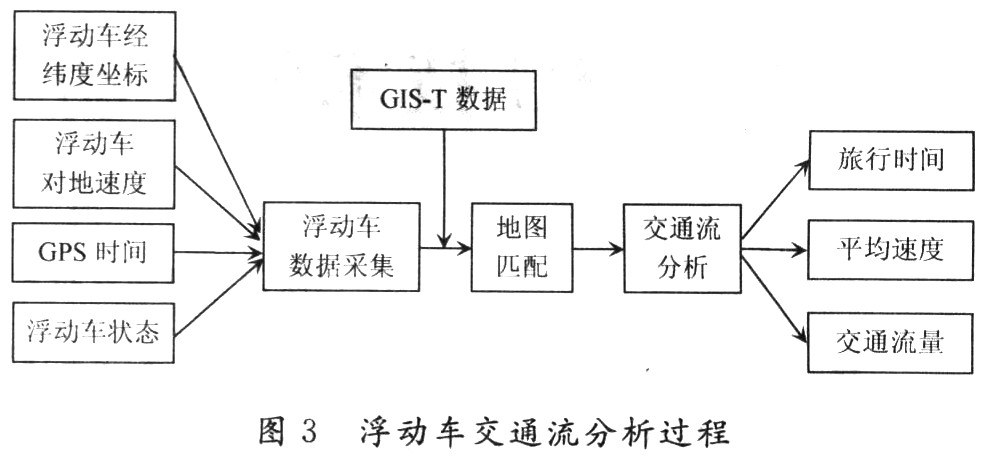
数据采集子系统通过路网上行驶的安装在浮动车上的车载端GPS接收器采集车辆运行数据;通过车载端的无线通信终端设备采用3G通信技术将上述信息实时传输给数据控制中心,同时还接收数据中心发送的命令。该子系统主要完成以下数据采集:车辆交通流、时间、车辆位置经度及纬度、速度、方向角和运行状态等,如图3所示。
系统设计时主要考虑以下参数:浮动车覆盖率、计算时间间隔、采集时间间隔、测量时间等。通过仿真实验得出每个时间间隔内横断面浮动车数量计算公式为:
Np=P·(Q·ta/60)
一般情况下,在高速公路上只要浮动车覆盖率为3%时即可,在城市道路上覆盖率为5%即可达到满意效果。采集时间间隔必须考虑覆盖率。浮动车覆盖率低,采集间隔应该缩小,反则增大。可以在工作站运用一些更加精巧的估计算法来减小其对实时性的影响,一般取采集频率为1 min,上传中心频率为5 min。当数据的年龄超过10 min时,对实时速度数据进行简单线性衰退处理基本能对实时的估计起到比较满意的效果。
2.2 地图匹配子系统
地图匹配是实现整个浮动车采集信息系统功能的关键,目的是减小GPS数据和GIS数据的匹配误差。为此,要对数据进行预处理并确定匹配路段。
2.2.1 数据预处理
数据预处理包括对GIS数据和地图数据预处理两个方面。
由于GIS数据一般是以矢量格式存储且所有路段都是以曲线形式表现的,为此,先将路段曲线预分割成为多条首尾连接的有向线段,从而使每条路段变成了一些线段的集合。这样可以大大提高后续地图匹配的速度和效率。
为了缩小匹配路段的范围和针对性(方向),还要对地图数据预处理。首先进行地理坐标系转换,使浮动车定位数据和地图库数据所采用的地理坐标系一致。其次通过一定算法确定候选路段,常用的算法有:网格法、概率统计法、误差椭圆法、条带分割法等。本文采用网格法。该方法的原理是将电子地图按照一定的网格进行划分,然后找到GPS点所在网格,该网格所包含的路段就是候选路段。
2.2.2 匹配路段确定
目前,车辆定位导航采用的算法有:GPS航迹匹配法、模糊逻辑法、A*、双向搜索法等。这些方法在GPS定位和导航中都有非常广泛应用。但由于浮动车数量大、匹配速度要求高,采用上述单一的传统算法都难以满足浮动车地图匹配要求。为此,本文提出分类模型算法的思想。它建立在一个道路网格拓扑结构之上,如图4所示。并且针对道路的实际情况设计了不同的道路匹配算法。
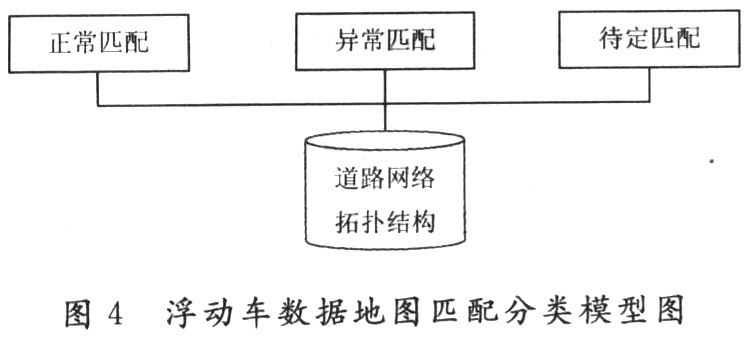
正常匹配模型是整个地图匹配模型的入口,实现正常情况下待匹配道路的匹配,并对其进行排序,检查是否有道路符合道路匹配的条件,如果有,则匹配成功;否则进入下一个匹配模型。
但由于各种误差,如双向车道的反方向车辆,若采用上述道路匹配模型得到的道路可能包含反方向的道路。这样会给后续的延时匹配造成干扰。异常匹配道路模型就是解决以上问题的匹配模型。
对于大型城市的复杂道路,如主辅路、立交桥等,道路与道路之间的距离近,角度差小,有时投影到平面上几乎是重合的。在这样的路网环境下,通过单一GPS数据往往无法确定车辆的确切位置,这时就需要通过相同车辆的多个GPS数据来联合判断车辆的行驶轨迹,待定模型就是解决这类问题的一个迭代模型。在设计以上模型基础上可以采用最小距离算法实现地图匹配。原理是通过计算GPS点到各个候选路段的距离,选择距离最小的那条路段作为匹配路段,GPS点到该路段的投影即为匹配点。
2.3 浮动车交通流分析子系统
交通流分析首先筛选符合条件的浮动车数据,建立动态交通流数据模型,然后以此模型获得浮动车行程时间、平均速度、交通流量等交通信息。
2.3.1 建立交通流模型
由于采集的信息中包含大量车辆,可能会产生一些错误和干扰信息,为了保证所采集的信息尽可能有效,必须对样本进行必要的筛选。本方案首先将这些数据按照车辆ID进行区分,由于每个浮动车的ID在系统中是惟一的,所以根据车辆ID将数据进行分类是有效的。其次,设定一个阈值,当路段上某车辆的GPS数据点数小于一定阈值时,例如速度高于阈值,就认为是干扰数据,该车辆的数据将被剔除。最后,将符合条件筛选出的浮动车辆的GPS数据作为交通流样本模型,并以此样本模型计算每辆独立车辆的行程时间和平均速度。
2.3.2 交通流数据估算
交通流估算是在计算出了独立车辆的行程时间和平均速度基础上,确定浮动车的样本数并从中抽样进行交通流分析。样本数越大估算结果的可靠性越高,但同时估算速度和效率也就越低。经过仿真实验,认为样本数最小为整个浮动车数目的75 %即可满足估算要求。具体计算如下:
(1)平均速度估算
平均速度可以用两种方法来计算,即时间平均速度和空间平均速度。时间平均速度是指道路某一断面车速分布的平均值,即断面上所有车辆点速度的算术平均值。空间平均速度是指在给定路段上,同一瞬间车速分布的评价值。
(2)行程时间计算
行程时间估计的方法有两种:第一种是直接测量法,把观测路段分成小段,计算浮动车在每一小段的行程时间,然后把这些行程时间进行相加,得到总得行程时间;第二种是间接测量法,根据上面计算出来的路段平均速度,用路段长度除以路段平均速度,得到行程时间。
(3)交通流量估计
交通流量估算是指在单位时间内,通过道路某一地点,某一断面或某一条道路的车辆数,一般流量和空间平均速度具有一定的关系,可以根据上面计算的空间平均值估计交通流量数据。
当独立车辆数目小于最小浮动车样本数时,继续采用以上方法计算交通流参数势必造成很大误差,此时必须使用单个GPSs浮动车的数据进行数据估计。
2.4 3G移动互联子系统
3G移动通信网络实现整个系统之间信息交换的互传,子系统结构如图5所示。
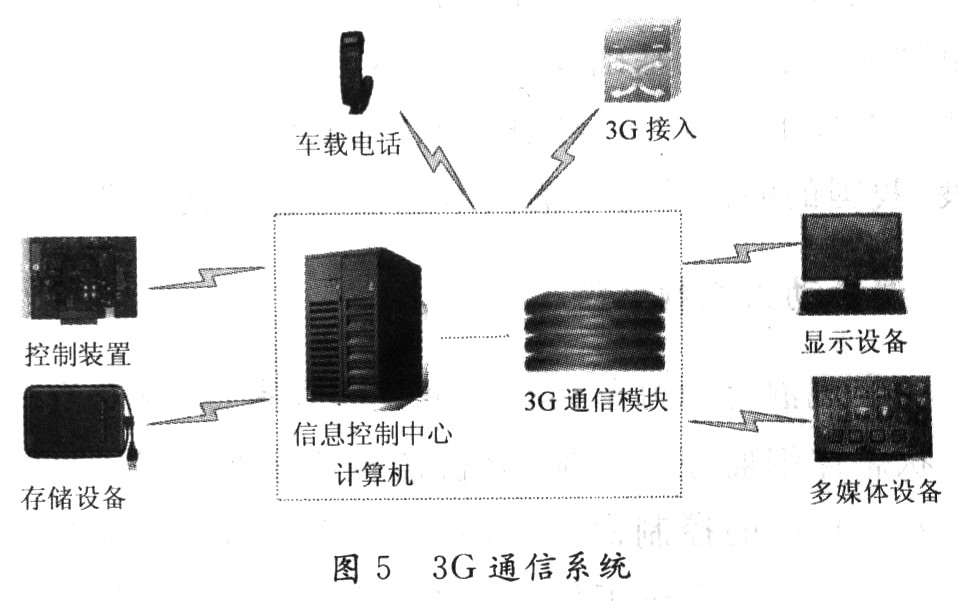
网络服务商可以选用中国移动,也可以选用中国电信。系统设备包括信息控制中心计算机、显示设备、控制设备、存储设备和车载导航设备及个人用户等。其中信息控制计算机用来为移动网络访问服务,这些访问首先经由服务器响应,然后通过服务器互传相应的交通信息。其他设备可以与车载娱乐设备或非导航与无线互连系统共用。例如,显示设备可以用来显示汽车电控仪表系统适合在屏幕显示的信号;音响设备可以和汽车的电视、DVD等系统共用。
3 结语
浮动车交通信息采集系统在智能交通领域受到越来越多的关注,本文探讨了即将在我国广泛推行的3G通信技术和浮动车信息采集系统功能要求,提出了基于3G技术的浮动车信息系统的设计方案,重点描述了浮动车数据采集、地国;科匹配和交通流估算方法。这种新的交通信息采集方法有着建设成本低、实时性强、传输速度高、数据传输量大优点,它的实现和推广应用将会对交通管理和服务提供良好的交通支持。










 工商网监
工商网监
评论