提出了一种基于人类使用的2D语义图以亚米精度定位图像的算法,OrienterNet,通过将BEV图与OpenStreetMap中开放可用的全局地图相匹配来估计查询图像的位置和方向,使任何人都能够在任何可用地图的地方进行定位。
2023-05-04 09:15:00 285
285 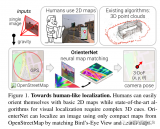
依托机器视觉的机器人定位系统包含摄像机系统和控制系统。 其中摄像机系统中包括计算机(具有图像采集卡)、摄像机,主要收集视觉图像,并应用机器视觉算法。
2022-11-30 16:05:49451 二维图像尺寸测量仪侧重于双远心镜头的整体成像(拍照式),结合高分辨率工业相机及高精度图像分析处理算法,通过软件计算后实现测量。外形设计充分利用空间结构,以及人性化设计理念,小巧精致,占地面积小。拍照
2022-10-14 17:13:17
在这几个领域中,一个最基本的算法就是产品识别和定位,比如视觉引导机器人,要在图像中识别出要抓取的产品,并定位出坐标,才引导机器人到指定的产品位置。
2022-10-11 15:38:46679 中图仪器VX系列二维图像尺寸综合闪测测量仪采用双远心高分辨率光学镜头,结合高精度图像分析算法,并融入一键闪测原理。只要在视场范围内,单次可以测量多个工件,小微型工件甚至可以测量几十个。只需一键,仪器
2022-07-05 15:03:23
中图仪器VX3000系列二维图像尺寸批量测量仪器可以满足各类零部件轮廓尺寸快速测量需求,工件无需定位,任意摆放,一键完成二维平面尺寸测量,搭载光学非接触式测头还可实现高度尺寸、平面度等参数的精密快速
2022-05-19 15:06:11
分析结果以及用、田所设计的交互式虚拟二维声源定位系统软件的使用表明, 该算法是实用和有效的。[hide][/hide]
2009-12-10 16:24:07
室内定位系统方案中,UWB定位技术目前应用较多,得益于UWB定位10-30厘米的超高定位精度。 目前根据使用场景的不同,UWB定位系统的定位维度分为以下4种:0维定位、一维定位、二维定位、三维定位
2021-09-26 15:22:207310 基于灰狼优化算法的机器人源定位追踪
2021-06-19 11:49:29 5
5 ,更能充分地提取图像信息,获取更具有鲁棒性的特征,因此基于深度学习的方法已成为二维人体姿态估计算法研究的主流方向。然而,深度学习尚在发展中,仍存在训练规模大等问题,研究者们主要从设络以及训练方式入手对人体姿态
2021-04-27 16:16:077 针对 Taylor算法在TDOA三维定位中受到外界条件的影响而导致大范围求解失败的问题,开发TDOA三维定位算法仿真软件并对 Taylor算法在TDOA三维定位中的应用进行仿真,找到 Taylor
2021-03-24 15:12:3118 介绍了一种基于Altera公司Cyclone2系列Flea芯片的图像搜索定位视觉识别系统。该系统利用了0V9653 CMOS摄像模块的分窗口拍摄模式获取焊点图像。在Flea中根据一定的图像处理算法获取图像的轮廓,并实现自动搜索定位焊点的功能。
2021-02-03 14:46:268 定位技术是机器人实现自主定位导航的最基本环节,是机器人在二维工作环境中相对于全局坐标的位置及其本身的姿态。目前SLAM (Simultaneous Localization and Mapping即时定位与地图构建)是业内主流的定位技术,有激光SLAM和视觉SLAM之分。
2020-12-26 10:59:431061 视觉定位是自动驾驶和移动机器人领域的核心技术之一,旨在估计移动平台当前的全局位姿,为环境感知和路径规划等其他环节提供参考和指导。国内知名互联网公司-美团无人配送团队长期在该方面进行深入探索,积累
2020-11-13 10:50:054070 
为了进一步提高混沌系统的混沌特性,为图像加密算法提供更可靠的混沌系统,增强图像加密算法的安全性,提出了一种基于二维反三角超混沌系统的新型图像加密算法。首先,在一维三角混沌函数的基础上构建了一个二维反
2020-08-31 14:23:007 当前机器视觉在各种导航系统中的应用日渐成熟,这种技术正是建立在数字信号和图像处理成熟理论和算法基础之上,本系统借鉴机器视觉导航技术主要为智能型道路划线车提供精确的定位,以使划线车能够准确的获知在道路
2020-08-18 17:20:002 ;(4)将草莓放置在盘中。这4步中的前两步属于定位步骤,在整个机器手的设计中具有重要地位。因此,如何设计精准的定位算法是草莓机器手设计的关键。目前主流的定位算法大多基于机器视觉技术。
2020-03-02 08:07:00961 为了进一步提高混沌系统的混沌特性,为图像加密算法提供更可靠的混沌系统,增强图像加密算法的安全性,提出了一种基于二维反三角超混沌系统的新型图像加密算法。首先,在一维三角混沌函数的基础上构建了一个二维反
2019-11-05 16:43:542 可以知,TDOA定位算法通过UWB信号进行基站的同步,定位精度高,UWB标签功耗低,且标签容量可以达到上千个,数据延时也非常低,是UWB定位系统方案的首选定位算法。 以上就是UWB定位的三种
2019-11-01 18:55:1314661 算法决定了室内定位的模式。室内定位种类虽然比较多,但是室内定位算法一般都是通用的。总结起来室内定位有3种常见的定位算法。 一、室内定位算法-近邻法
2019-09-26 18:54:3125465 算法。首先给出基于深度学习网络的系统整体结构;其次,搭建目标检测多层卷积神经网络(CNN),生成自主驾驶机车前方视野范围内行人的二维坐标及边界框的尺寸;再次,通过多项式拟合计算出图像中行人到机车之间的第三维距离;最后
2019-03-28 16:49:5212 本文主要设计一种残缺二维码的识别算法,通过设计具备记忆能力的神经网络,建立残缺二维码与电缆信息的映射关系,从而在二维码因外界原因出现残缺的时候,能够读取与之对应的电缆信息。该算法中的神经网络采用
2018-11-19 16:01:4425 的定位模式。室内定位种类虽然 多 ,但是 室内定位 算法很多都是通用的,总结起来有下面 3 种常用的算法。 一、 近邻法 最简单的方式,直接选定那个信号强度最大的 AP 的位置,定位结果是热点位置数据库中存储的当前连接的 Wi-Fi 热点的位置。 二、 基于无线信号
2018-07-27 10:50:3211011 
目前RFID定位主要采用LANDARC及其衍生的方法。较常采用的方法是在一个二维平面上,每隔1~2 m摆放一个参考标签,而且需要4个以上的远距RFID读取器,硬件成本较高。
2018-05-02 10:06:006064 
信息来对未知节点进行定位,因此,将定位算法分为基于距离的定位算法以及距离无关的定位算法。 在无线传感器网络的节点定位过程中,未知节点在x轴和y轴方向上的定位精度较z轴更重要。为此,在RSSI高斯混合(RGM)算法的基础上提出一种基于平面投影的定位算法。通过
2018-03-12 14:16:440 三维节点定位问题主要应用于医疗保健、安防及紧急控制等系统。精确的三维节点定位有助于无人系统的发展,无人系统能够通过无线传感器网络( Wireless Sensor Network, WSN)检测
2018-03-12 13:46:460 基于无线通信和网络技术的三维空间定位是目前物联网领域的一个研究热点,针对当前三维目标定位算法的精度低、复杂度高、功耗大等实际问题,提出了一种新型的分布式三维定位机制。该算法采用合作位置感应算法
2018-02-27 16:21:060 针对城市环境中全球定位系统( GPS)信号易受到高层建筑遮挡而无法提供准确位置信息的问题,提出了一种基于建筑物竖直侧平面特征及建筑物二维轮廓地图的移动机器人定位方法。该方法利用车载视觉,首先对两视图
2018-01-30 16:04:131 针对接收信号强度值( RSSI)的时变特性降低定位精度的问题,提出了一种基于二维网格特征参数融合的室内匹配定位算法。该算法融合RSSI和信号到达时间差(TDOA)构建网格特征参数模型,基于二维网格
2018-01-29 11:52:370 未知节点距已知节点可能的椭圆运动轨迹,进而运用牛顿迭代法求解所构造的二次轨迹方程组,实现对未知节点的定位.同时,对定位可能出现的错误进行了概率分析,得出错误概率与锚点个数之间的函数关系,实验定位与传统算法相
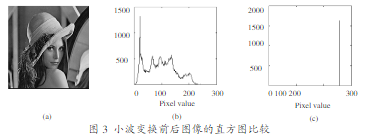
2018-01-05 16:28:131 针对如何检测数字图像内容是否完整、有无篡改,提高认证图像质量的问题,提出了一种基于二维直方图移位的图像认证算法。首先,在棋盘格结构中利用两种预测差值计算方法构建原始图像的二维直方图,由预先设定的参数
2018-01-03 13:40:100 为了提高WSN节点定位精度,针对测距误差对定位结果的影响,提出基于模糊C均值聚类的定位算法。算法首先利用多边定位算法得到若干个定位结果,利用模糊C均值聚类算法对定位结果进行聚类分析,然后,根据聚类
2017-11-09 17:47:1310 特性,增加了样本的多样性,克服了重采样过程中的粒子退化问题,并针对二维平面机动模型进行仿真。仿真实验表明,本文算法能够适用于机载无源定位系统,能够有效的提高滤波精度,跟踪性能优于经典的粒子滤波算法。
2017-11-08 15:32:321 。但是目前各种RFID 定位算法均是。二维算法6-8,文中提出种RFID.三维矫正定位算法,与原有LANDMARC系统相比,定位精度
2017-10-31 16:08:0413 二维直线阈值分割法所需要的阈值点,由此得到一条阈值直线,根据这条直线在二维图像中对其进行划分。该算法抗噪性能优秀,比基于二维Otsu 法叶的直方图法和二维直线阈值法耗费时间更少,而且过程更简单,更加适用于实时应用中。
2017-10-30 18:21:3615 为了在生产过程中实现对被测工件尺寸和其它参数精确、快速和可靠测量,设计了一种嵌入式二维图像测量系统;介绍了其硬件电路原理及实现、二维图像测量原理、图像处理算法和应用程序开发;对系统电路的重要单元模块
2017-09-22 16:08:148 车牌识别(LPR)技术是计算机视觉、图像处理技术与模式识别技术的融合,是智能交通系统中一项非常重要的技术。一般说来,车牌识别前期的处理技术至关重要,其前期技术包括:车牌的定位、车牌图像的二值化及字符分割。本文主要针对车牌定位算法进行研究。
2017-09-06 15:14:246 在足球机器人的各种关键技术中,机器视觉是应用范围最广,最为基本的技术之一。移动机器人视觉的研究主要集中在颜色模型建立、目标识别、定位以及跟踪等方面。仿人机器人视觉系统的识别与定位算法也是目前的研究
2016-09-21 11:31:5552 移动机器人视觉的研究主要集中在颜色模型建立、目标识别、定位以及跟踪等方面。目标的实时识别与定位是足球机器人在足球赛中精确踢球的前提。文章主要是针对目前足球机器人在视觉系统上所存在的问题进行了颜色模型建立及目标定位算法的改进,加入了目标追踪算法,确保目标识别与定位的准确。
2016-09-19 11:18:422412 基于目前思坦水声定位系统主控软件系统,采用了水声二次定位系统的水声传播原理,结合水面GPS定位技术,针对水下目标的位置坐标进行精确确定技术的方法编写的定位算法,通过思坦水声定位系统主控软件测试和大量实验,软件已经大量使用,研究的水下二次定位系统的定位算法可行性。
2015-12-24 15:43:108 移动机器人激光全局定位系统的算法研究移动机器人激光全局定位系统的算法研究
2015-12-18 16:29:3814 提出了一种新的二维DCT和IDCT的FPGA实现结构,采用行列快速算法将二维算法分解为两个一维算法实现,其中每个一维算法采用并行的流水线结构,每一个时钟处理8个数据,大大提高电路
2012-01-12 10:35:5459 为了实现快速稳定无偏定位跟踪,提出了一种新的双站纯角度快速渐进无偏定位跟踪算法。该算法通过对未知状态变量含二次约束的伪线性方程进行约束最小二乘(CLS)极小化处理,最
2011-10-08 15:33:1830 本内容提供了复杂背景图像中的车牌定位算法
2011-05-19 10:50:1747 摘要! 以利用投影特征将二维数据简化为一维的算法为基础! 提出了一种基于平移量的机器 人灰度图像匹配算法!以减少计算时间并提高计算效率 本算法实时性强!时间复杂度小 经过实验
2011-03-29 16:43:2236 文中提出新的高精度, 快速二维声源定位算法。计算机采集四个声音传感器, 一个风速传感器和一个风向传感器的信号, 计算出声源的位置和当地的声速。用语言进行的仿真分析结
2010-07-08 16:10:08134 二维最大相关法图像分割算法充分利用了图像像素的灰度分布信息和各像素间的空间相关信息,因此算法的抗干扰能力强、图像分割效果好。但该算法的搜索空间大、计算时间长。
2010-07-08 14:51:4718 一种基于二维离散小波变换的医学图像增强算法
噪声是影响医学图像质量的最重要的因素之一。去除噪声,增强图像以提高图像质量是医学图像处理的重要课题。传
2010-02-22 17:15:5151 针对相干分布式信源二维波达方向估计算法多采用谱峰搜索导致计算复杂度较大的问题,该文提出了一种二维波达方向分离估计算法。该算法通过将积分形式的相干分布式信源方向
2009-11-24 15:19:3715 以 QR 矩阵码为例,介绍一种实用的二维条码识别算法。首先探讨了二维条码的定位与分割算法,利用Hough 变换与Sobel 边缘检测把条码图像从原始采集的图像中有效地分割出来;然
2009-08-12 17:30:0639 本文提出一种将时空二维混沌应用到数字水印中去的算法。首先利用时空二维混沌直接生成信息模板,加入到作品图像离散余弦变换(DCT)域的频率成分中去。合法使用者通过时
2009-07-15 11:13:0410 对机器视觉二维反求测量系统进行了研究,以实现二维复杂平面边缘尺寸的数字化录入。采用虚拟网格技术实现大场景下的测量标定。利用双CCD 分区域获取图象,通过设置规则参照
2009-07-11 11:05:1810 本文介绍了一种采用激光定位技术,利用二维CMOS图像传感器(OV7110)作为敏感元件、通过CPLD接口电路与DSP处理器链接组成的二维图像位移传感器,此传感器通过通讯接口输出实时
2009-07-02 09:18:5229
正在加载...
 电子发烧友App
电子发烧友App


















 工商网监
工商网监
评论