梯形图中的继电器、接点、线圈不是物理的,是PLC存储器中的位(1=0N;0=0FF);编程时常开/常闭接点可无限次引用,线圈输出只能是一次。
2023-09-21 14:12:59 77
77 
尽管梯形图与继电器电路图在结构形式、元件符号及逻辑控制功能等方面类似,但它们又有许多不同之处,梯形图有自己的编程规则。
2023-09-21 09:43:14159 
初学PLC梯形图编程,应要遵从必定的规则,并养成一个好习惯。下面以三菱FX系列PLC为例,简略介绍一下PLC梯形图编程时需求遵从的规则,希望对咱们有所帮助。有一点需求阐明的是,这篇文章虽以三菱PLC为例,但这些规则在其它PLC编程时也可相同恪守。
2023-08-20 09:51:15498 
在没有给出输入/输出设备定义和PLC的I/O配置的情况下,应根据PLC的I/O接线图或梯形图和指令语句表,做出输入/输出设备定义和PLC的I/O配置。
2023-08-20 09:21:15121 解析PLC梯形图程序设计
2023-06-30 11:14:25476 
PLC梯形图编程是一种用于计算机控制系统中的图解语言。其主要使用者是工厂广大电气技术人员,为了适应他们的传统习惯和掌握能力,通常PLC不采用微机的编程语言,而常常采用面向控制过程、面向问题的“自然语言”编程。
2023-06-26 14:24:08628 
虽然PLC程序编写每个人有每个人的思路,但是最终的模式都是相通的。本文以三菱PLC的简单梯形图编程方法为例,分享一下万能的编写模板。
2023-06-09 09:23:561314 
PLC初学者必须掌握的七大梯形图
2023-05-25 16:44:38 4
4 ,梯形图的设计称为编程。梯形图编程中,用到以下四个基本概念: 1.软继电器 PLC梯形图中的某些编程元件沿用了继电器这一名称,如输入继电器、输出继电器、内部辅助继电器等,但是它们不是真实的物理继电器,而是一些存储单元(软
2023-05-12 16:24:201123 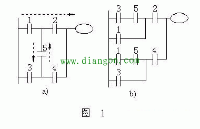
在没有给出输入/输出设备定义和PLC的I/O配置的情况下,应根据PLC的I/O接线图或梯形图和指令语句表,做出输入/输出设备定义和PLC的I/O配置。
2023-05-06 10:06:32277 控制的逻辑并根据该逻辑编写梯形图逻辑程序。而篇文章,我们将详细地写在梯形图(LAD)PLC程序为这个简
单的水泵系统,并在部分本示例的第3部分,我们将使用 PLC 模拟器S7-PLCSIMV16对其进行测试。
2023-04-18 10:33:300 语言。它是在继电器控制电路的基础上演绎出来的,具有形象、直观、实用的特点,电气技术人员容易接受。梯形图通常由触点、线圈两个基本编程要素构成。为了解梯形图,需要清楚以下几个基本概念。 1) 能流:在梯形图中
2023-04-17 15:16:470 PLC的软件编程语言与一般计算机语言相比,具有明显的特点,它既不同于高级语言,也不同于一般的汇编语言,且要满足易于编写和调试的要求。
早期的PLC仅支持梯形图编程语言和指令表编程语言,现根据
2023-04-16 10:06:091095 初学PLC梯形图编程,应当遵从一定的规则,并养成一个好习惯。下面以三菱FX系列PLC为例,简略介绍一下PLC梯形图编程时需要遵从的规则,希望有所帮助。有一点需要阐明的是,这篇文章虽以三菱PLC为例,但这些规则在其它PLC编程时也可遵守。
2023-04-14 16:20:021173 梯形图是一种PLC编程语言,也被称为梯形逻辑(Ladder Logic)。之所以称为梯形图,是因为这种程序由一条条水平线构成,看起来很像梯子。
梯形图是为电气工程师发明的,它是一种图形化
2023-04-14 15:40:557649 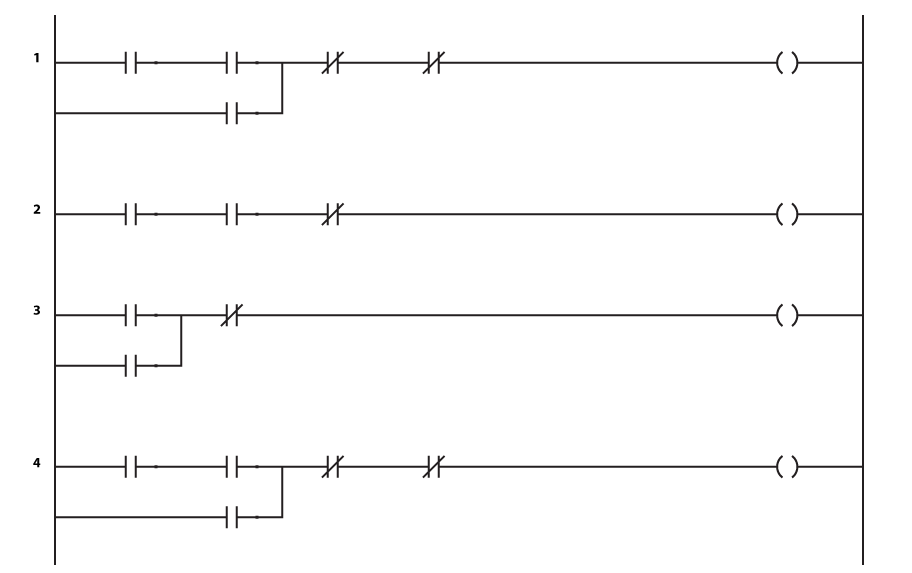
虽然PLC程序编写每个人有每个人的思路,但是最终的模式都是相通的。本文以三菱PLC的简单梯形图编程方法为例,分享一下万能的编写模板。
2023-04-12 09:37:403012 梯形图的每个水平线称为一条“路线”(或称“程式线”),每个垂直线称为一个“逻辑元件”,通常包括常开/常闭接点、触发器、计数器、计时器等。逻辑元件在梯形图中的位置表示它们的逻辑关系和运行顺序。
2023-03-22 16:08:411646 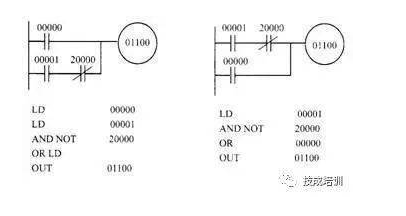
PLC梯形图编程语言是一种用于编写自动化应用程序的编程语言。它的名称来自梯形图的形状,每个梯形代表一个逻辑功能块。梯形图编程语言是一种图形化编程语言,具有易于理解和调试的优点,这使得它成为自动化应用程序中最流行的编程语言之一。
2023-03-17 15:48:15498 在PLC梯形图编程语言中,程序员通过将不同的逻辑功能块连接在一起,来构建自动化控制流程。逻辑功能块可以是一个标准逻辑运算,例如与、或、非,也可以是更高级的功能块,例如计数器、定时器等等。
2023-03-17 15:25:231235 PLC梯形图编程是一种用于计算机控制系统中的图解语言,它采用梯形图的形式描述程序的逻辑关系,以实现实时控制和自动化控制。PLC梯形图编程的核心概念是梯形图。梯形图是一种由水平和垂直线条构成的图形,通常用于表示电路的逻辑关系。在PLC梯形图编程中,梯形图用于表示一个程序的逻辑关系。
2023-03-17 15:07:552542 PLC梯形图编程的主要要素包括输入、输出和逻辑元件。其中,输入和输出指的是PLC系统与物理世界之间的接口,如传感器和执行器;逻辑元件则用于描述输入和输出之间的逻辑关系。PLC梯形图编程的逻辑元件包括控制器、计数器、定时器、触发器、比较器、逻辑运算符等,它们可以组合使用,以实现复杂的控制功能。
2023-03-17 14:50:041688 PLC梯形图编程具有很好的可读性,因为使用图形化的方法来呈现程序结构和编程逻辑。梯形图可以清晰、直观地表示控制系统的逻辑关系,使得程序员可以在不具备深入的编程技术的情况下,理解和修改程序。此外
2023-03-17 14:32:103215 PLC梯形图编程是一种用于计算机控制系统中的图解语言,它是为了方便工程师进行程序设计和维护工作而发展出来的。与其他编程语言类似,PLC梯形图编程语言也具有一定的语法和规则,但它与C/C++或Java等高级编程语言相比,更加简单明了。
2023-03-17 14:07:29366 梯形图编程是基于逻辑组件(与门、或门、非门)以及控制元件(计数器、定时器、比较器等)来构建过程控制程序的方法。在PLC中,梯形图通常是在集成开发环境(IDE)中编写的,其中PLC程序员使用图形化编辑器创建逻辑和控制元件的连接。
2023-03-16 18:20:512026 梯形图编程是一个广泛应用于PLC编程的编程语言,它有一个与电子电路图非常相似的框架,但是它的目标是编写和执行自动化过程控制程序。
2023-03-16 18:02:501428 PLC梯形图语言是一种用于编程可编程逻辑控制器(PLC)的图形化编程语言。它类似于电路图,其中使用不同的图形符号表示不同的逻辑元件,例如触点、线圈、计数器、定时器等。逻辑元件可以通过连接逻辑线(通常用来表示电线)来实现逻辑连接。
2023-03-16 17:39:141763 PLC梯形图的语句表是指将梯形图对应的程序逻辑,转化为文字形式的表格。这个表格中会列出每个逻辑元件的名称、参数、描述以及连接的输入输出点,以方便程序员进行编写和调试。
2023-03-16 17:18:202173 PLC(可编程逻辑控制器)是一种常用于工业自动化领域的控制器设备,它能够对生产过程进行精细的控制和管理。在PLC的程序设计过程中,梯形图是一种常用的设计方法,以下是PLC梯形图的设计方法。
2023-03-16 16:46:23982 在PLC梯形图中,逻辑上的输入和输出被表示为一个类似于梯形的图形。输入和输出被连接到梯形的顶部和底部,逻辑操作则被表示为在梯形图中的水平线路。水平线路上的逻辑操作可以包括逻辑门、定时器、计数器等功能模块。
2023-03-16 16:18:231503 PLC梯形图是根据PLC程序设计的逻辑流程图画出来的。PLC程序设计的逻辑流程图是由输入、处理和输出三个部分组成的,用于描述PLC系统中控制逻辑的运作过程。在梯形图中,输入和输出通常表示为开关、传感器和执行器等硬件元件,而所有的处理逻辑则以梯形的形式展现。
2023-03-16 16:02:206077 PLC梯形图是一种基于图形化表示方式的程序设计语言,用于描述程序的逻辑流程及控制流程。它主要以梯形结构来表达程序的逻辑关系,类似于电气原理图中的电路结构。
2023-03-16 15:48:2811310 PLC梯形图(Programmable Logic Control Ladder Diagram)是一种编程语言,通常用于控制工业自动化系统中的可编程逻辑控制器(PLC)。梯形图由电气工程师和编程人员使用,用于编写PLC程序,该程序在设备和机器上执行不同的逻辑流程控制。
2023-03-16 14:50:293970 PLC梯形图(Programmable Logic Control Ladder Diagram)是一种编程语言,通常用于控制工业自动化系统中的可编程逻辑控制器(PLC)。梯形图由电气工程师和编程人员使用,用于编写PLC程序,该程序在设备和机器上执行不同的逻辑流程控制。
2023-03-16 14:32:012600 PLC(可编程逻辑控制器)梯形图是一种常用的编程语言,用于控制工业自动化系统中的各种机器和设备。它是一种图形化编程语言,通过以梯形图的形式表示电路的逻辑关系,实现对工业控制进行编程。
2023-03-15 15:13:521109 最近在学PLC 想用multisim进行仿真,但是找不到画梯形图的工具包,望各位大侠指教
2013-08-23 00:09:10
这次主要介绍的是上一篇三菱SWOD5C-FXTRN-BEG-C PLC模拟仿真编程软件所使用的梯形图指令
2023-03-01 17:39:235666 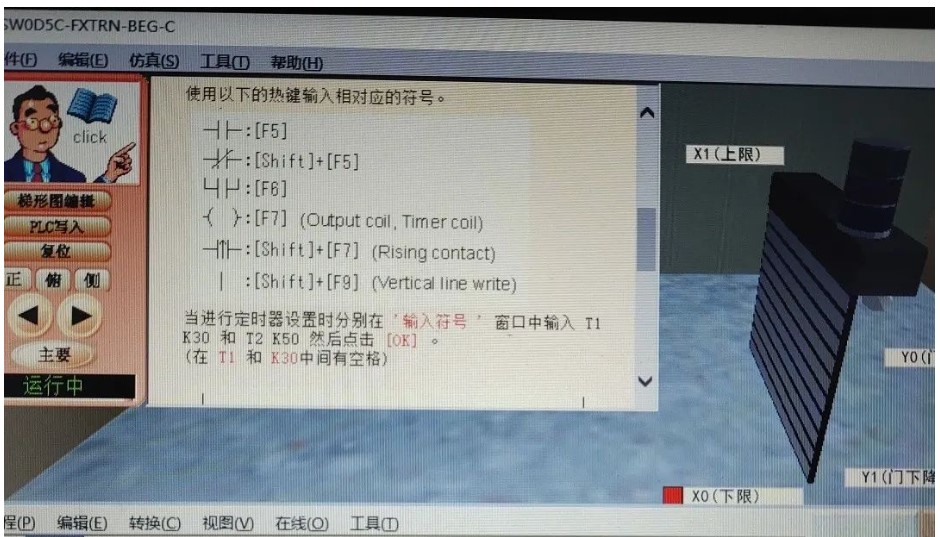
初学PLC梯形图编程,应要遵循一定的规则,并养成良好的习惯。下面以三菱FX系列PLC为例,介绍一下PLC梯形图编程的方法,希望对大家有所帮助。
2023-02-11 09:24:11999 人员用到最多的编程方式是梯形图(LAD),同样也是各大PLC生产厂商的一种标配。与此同时,德国西门子plc旗下的博图编程软件在很早就推出与梯形图(LAD)相媲美的另一种编程方式:结构化编程语言(SCL)。
2022-11-03 17:42:168921 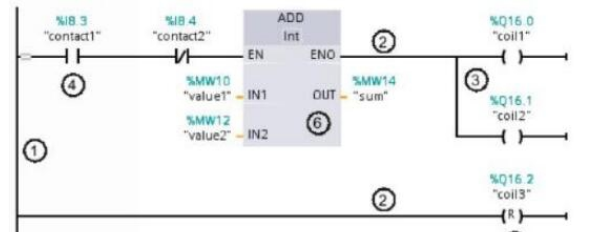
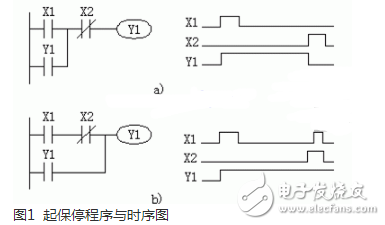
1、梯形图由多个梯级组成,每个线圈可构成一个梯级,每个梯级有多条支路,每个梯级代表一个逻辑方程;
2022-10-31 11:09:15822 初学PLC梯形图编程,应当遵从一定的规则,并养成一个好习惯。下面以三菱FX系列PLC为例,简略介绍一下PLC梯形图编程时需要遵从的规则,希望有所帮助。有一点需要阐明的是,这篇文章虽以三菱PLC为例,但这些规则在其它PLC编程时也可遵守。
2022-09-13 11:25:321394 梯形图中的继电器、接点、线圈不是物理的,是PLC存储器中的位(1=0N;0=0FF);编程时常开/常闭接点可无限次引用,线圈输出只能是一次。
2022-09-06 11:41:552477 电子发烧友网站提供《PLC Arduino NANO可编程梯形图.zip》资料免费下载
2022-08-01 10:23:125 三菱PLC(可编程逻辑控制器)编程实例项目例程,制冷控制系统梯形图(日本人编的,有英文注释,三菱FX2N-128MR-001)
2022-05-11 14:56:365 plc梯形图转换设计方法是将继电器电路图转换成PLC内部具有相同原始功能的梯形图。这种等价转换是一种简单快捷的编程方法,转换方法有很多优点。 首先,是原继电器控制系统经过长期使用和测试,证明能够完成
2022-01-06 11:27:003232 ,梯形图的设计称为编程。 梯形图编程中,用到以下四个基本概念: 1.母线 梯形图两侧的垂直公共线称为母线(Bus bar),。在分析梯形图的逻辑关系时,为了借用继电器电路图的分析方法,可以想象左右两侧母线(左母线和右母
2021-12-08 17:56:024475 plc 步进电机往返运行梯形图如下:
2021-07-30 09:44:1018983 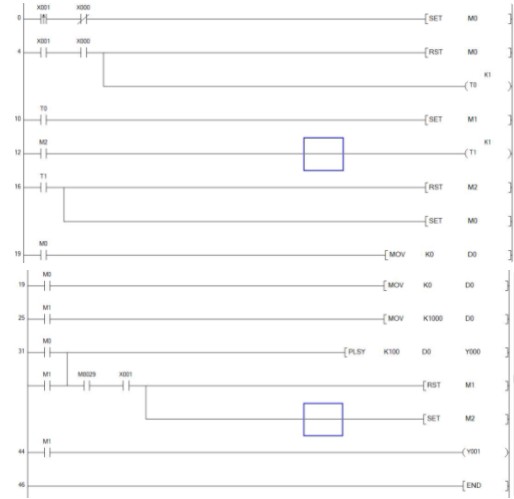
随着科技发展进步,越来越多发电气开始使用变频器,PLC,既然说到PLC 我们就要介绍梯形图,梯形图可以设计电路,梯形图能够有效的将电气原理图转化为梯形图,进而对PLC进行编程,输入指定的程序来控制现场的自动化设备。
2021-05-03 10:16:116121 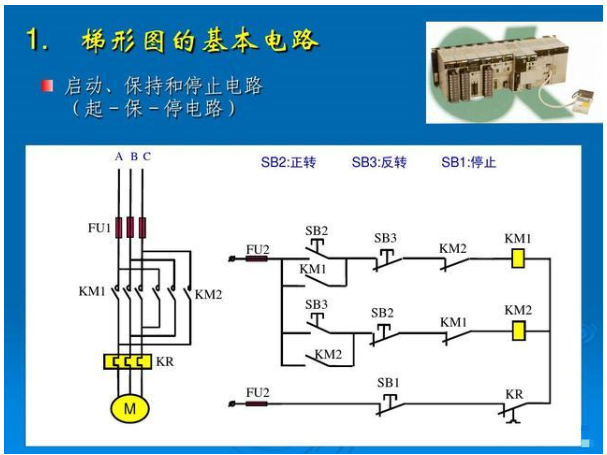
梯形图是plc最基本,也是最简单的编程语言,梯形图以其直观易懂,便于入门,吸引了广大菜鸟的狂热追捧,而梯形图之所以如此受欢迎,就是因为它把逻辑傻瓜化,让你一看就懂,而复杂的梯形图逻辑都是简单逻辑
2021-05-01 17:42:0030399 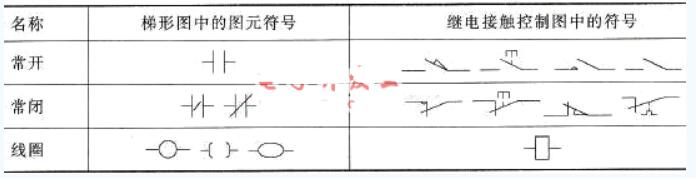
梯形图中所使用的输入、输出、内部继电器等编程元件的“常开”、“常闭”触点,其本质是PLC内部某一存储器的数据“位”状态。程序中的“常开”触点是直接使用该位的状态进行逻辑运算处理;“常闭”触点是使用该位的“逻辑非”状态进行处理。
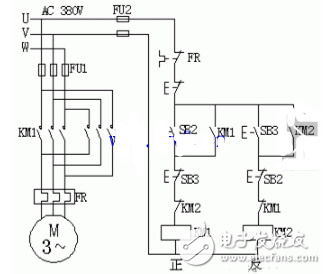
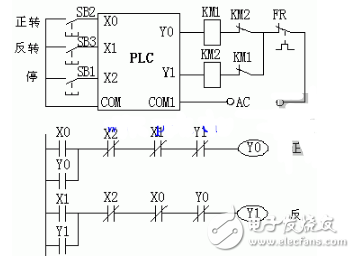
2021-03-23 15:04:191410 如图5-5所示为采用plc控制三相异步电动机正反转的外部I/O接线图和梯形图。实现正反转控制功能的梯形图是由两个起保停的梯形图再加上两者之间的互锁触点构成。
2021-03-23 14:57:186697 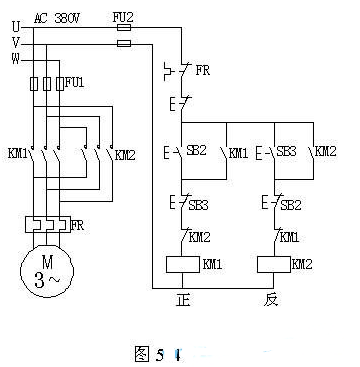
利用梯形图编程,首先必须确定所使用的编程组件编号,PLC是按编号来区别操作组件的 。我们选用的FX2N型号的PLC,其内部组件的地址编号如下表所示,使用时一定要明确,每个组件在同一时刻决不能担任几个角色。
2021-03-16 15:28:252833 本文档的主要内容详细介绍的是PLC编程梯形图的基本规则和编程实例说明包括了:1.线圈右边无触点,2.触点可串可并无限制,3.线圈不能重复使用,4.触点水平不垂直,5.触点多上并左,6.顺序不同结果不同。
2020-11-05 15:31:0058 PLC梯形图编程,应要遵循一定的规则,并养成良好的习惯。下面以三菱FX系列PLC为例,介绍一下PLC梯形图编程的方法,希望对大家有所帮助。 01 梯形图的基本画法 02 基本程序段 03 梯形图
2020-09-27 10:13:465171 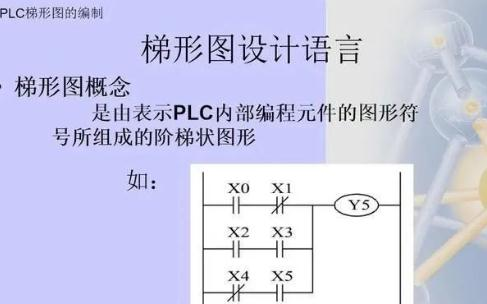
PLC梯形图编程,应要遵循一定的规则,并养成良好的习惯。下面以三菱FX系列PLC为例,介绍一下PLC梯形图编程的方法,希望对大家有所帮助。
2020-09-24 10:57:554842 
在日常的工作中,大家掌握了plc的基本编程指令之后,就可以根据控制要求编写简单的应用程序了。但是想要提高编程质量和编程效率,还必须了解编写梯形图程序的基本规则和基本编程方法。
2020-09-01 11:01:578218 
尽管梯形图与继电器电路图在结构形式、元件符号及逻辑控制功能等方面相类似,但它们又有许多不同之处,梯形图具有自己的编程规则。
2020-06-04 11:30:463022 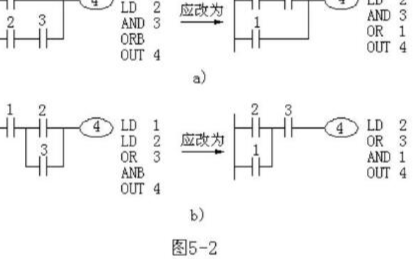
梯形图逻辑控制顺序的设计,可以从手工绘制梯形图开始。在绘制过程中,设计员可以在仔细分析机床工作原理或动作顺序的基础上,用流程图,时序图等描述,信号与机床运行间的逻辑顺序关系,然后再据此设计梯形图
2020-06-04 09:52:242823 本文档的主要内容详细介绍的是PLC梯形图基础教程资料说明包括了:第一章 可编程序概述,第二章 熟悉上机教材,第三章 编程,第四章 实例演练,第五章 故障处理
2020-05-19 08:00:007 一个用以控制风扇开始/停止操作的简单自锁电路,梯形图适用三菱FX系统PLC。
2020-05-12 14:14:1110496 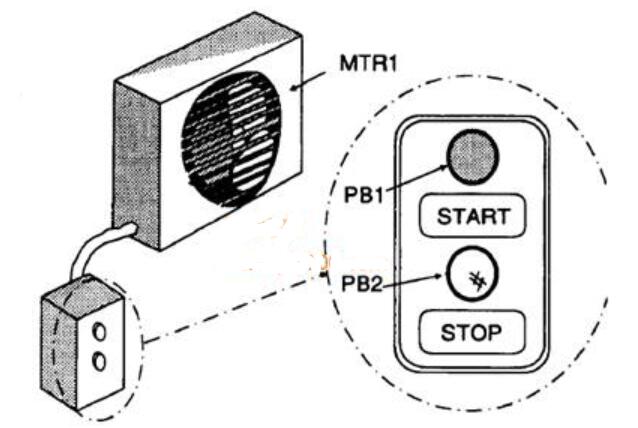
今天给大家分享继电器控制电路与PLC梯形图详解及怎么转换为PLC梯形图
2019-07-26 08:58:3410849 
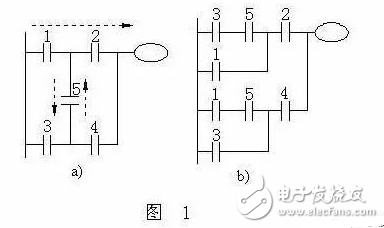
在有几个串联回路相并联时,应将触点最多的那个串联回路放在梯形图最上面。在有几个并联回路相串联时,应将触点最多的并联回路放在梯形图的最左面。
2019-06-20 15:47:157385 
梯形图中所使用的输入、输出、内部继电器等编程元件的“常开”、“常闭”触点,其本质是PLC内部某一存储器数据“位”的状态。在程序中的触点是直接使用该位的状态进行逻辑运算的。因其状态可以反复读取,所以梯形图中的触点可以在程序中被反复使用,没有数量限制。
2019-06-20 15:40:1611391 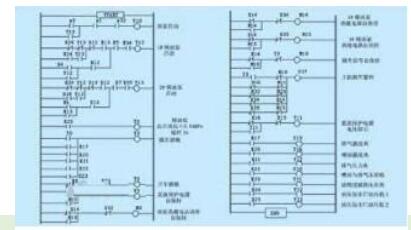
初学PLC梯形图编程,应要遵从必定的规则,并养成一个好习惯。下面以三菱FX系列PLC为例,简略介绍一下PLC梯形图编程时需求遵从的规则,希望对咱们有所帮助。有一点需求阐明的是,这篇文章虽以三菱PLC为例,但这些规则在其它PLC编程时也可相同恪守。
2019-05-11 11:04:394610 
梯形图的编程规则:在上节中所介绍的梯形图的组成特点,也是梯形图编程的一些基本规则,这里再介绍几条。触点不能接在线圈的右边;线圈也不能直接与左母线相连,必须通过触点连接。
2019-01-30 10:04:0010847 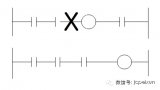
在PLC的编程语言中,梯形图是最为广泛使用的语言,通过PLC的指令系统将梯形图变成PLC能接受程序,由编程器键入到PLC用户存储区去。而PLC梯形图与继电器控制原理图十分相似,主要原因是PLC梯形图的发明大致上沿用户继电器控制电路的元件符号,仅个别处有些不同。
2018-06-22 15:40:0028581 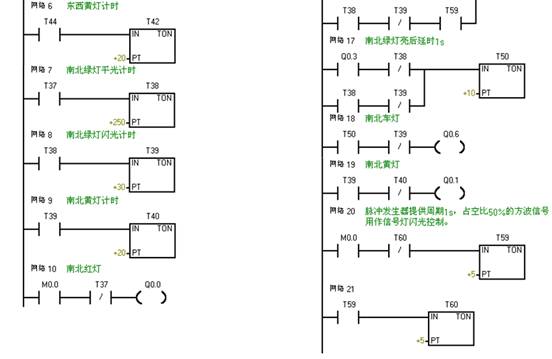
电力人都知道,电气控制电路和PLC是可以有效的转化的,在转化的过程中梯形图必不可少,特别是对于一些刚入门学习PLC的朋友,梯形图就像是电路图和PLC逻辑指令的转换桥梁一样,可以毫不夸张的说:掌握好电路梯形图的转化能够在一定的程度上加深对PLC的学习,当然梯形图在转化的过程中也是有一定的规则的!
2018-06-06 16:50:148563 
本文开始介绍了关于PLC梯形图编程的四个基本概念,其次详细介绍了PLC梯形图编程基本规则,最后介绍了PLC计数器程序梯形图编程实例。
2018-04-26 14:58:536084 
本文开始介绍了PLC的概念和PLC的基本结构,其次阐述了PLC的工作原理,最后介绍了如何看懂plc电路图以及如何看懂plc的梯形图。
2018-03-21 08:52:1988316 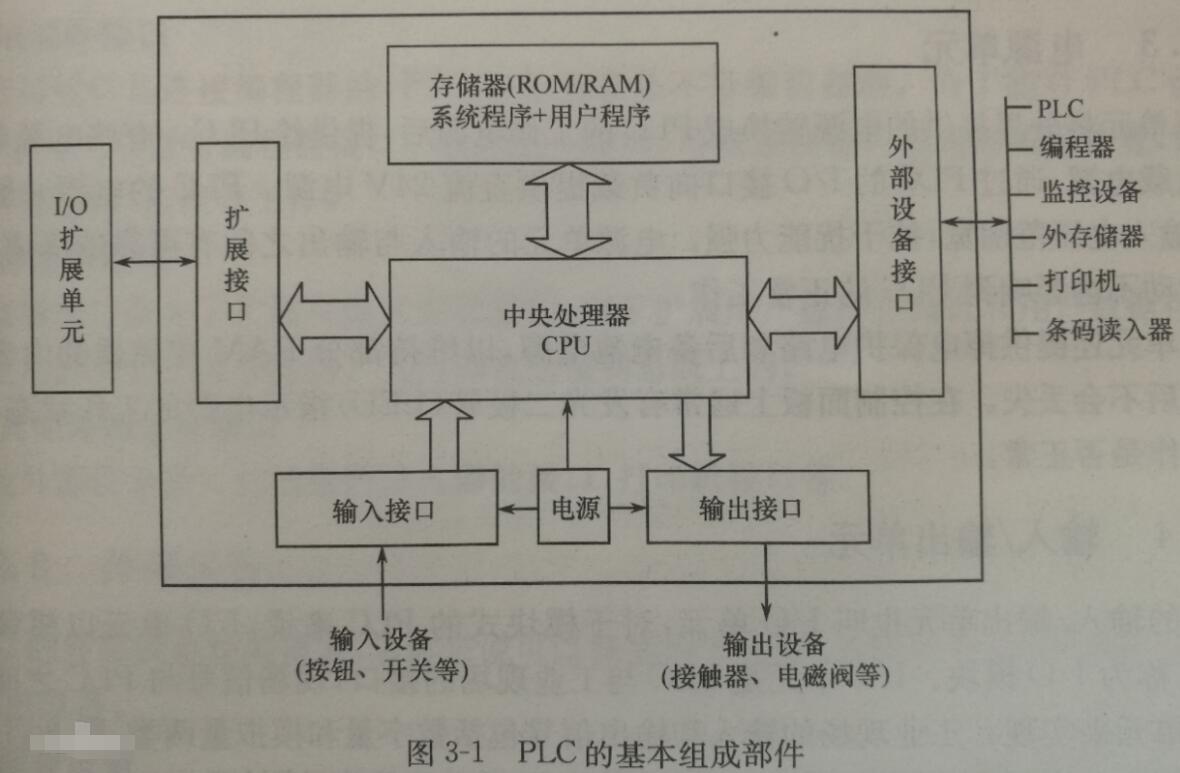
无论传统梯形图或PLC梯形图其工作原理均相同,只是在符号表示上传统梯形图比较接近实体的符号表示,而PLC则采用较简明且易于计算机或报表上表示的符号表示。
2018-02-01 08:47:2540191 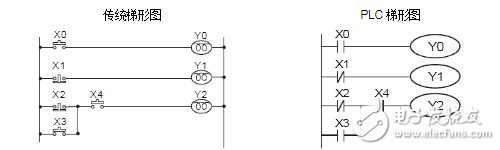
分享11种PLC常用环节梯形图程序及解析
2018-01-24 06:33:5422677 
本章将介绍PLC梯形图程序的基本原理,以及将梯形图程序转换成简码指令(MNEMONIC)的转译法则。
2017-09-26 10:57:1818 FANUC发那科PMC梯形图编程FANUC发那科PMC梯形图编程
2017-01-04 15:04:256 梯形图语言编程说明书,感兴趣的小伙伴们可以瞧一瞧。
2016-11-22 15:40:445 三菱PLC(可编程逻辑控制器)编程实例项目例程——物流分拣系统罗克韦尔RSView组态程序及PLC梯形图程序
2016-11-08 16:03:2859 PLC梯形图程序设计方法及应用实例,感兴趣的伙伴们可以看看。
2016-08-09 14:45:448 PLC梯形图编程基础知识详解,感兴趣的伙伴们可以看看。
2016-08-09 14:45:4412 初学PLC梯形图编程,感兴趣的伙伴们可以看看。
2016-08-09 14:45:4410 对于没有STL指令的PLC,也可以仿照STL指令的设计思路来设计顺序控制梯形图,这就是下面要介绍的仿STL指令的编程方式。
2016-07-28 16:03:292121 电子发烧友网站提供《PLC 梯形图编程软件FLADDER_III_5.7 中文版.rar》资料免费下载
2014-08-22 14:40:3577 文章将向您简单介绍PLC梯形图编程八个必须步骤。
2014-03-24 10:23:117116 根据继电器电路图设计PLC梯形图
PLC使用与继电器电路图极为相似的梯形图语言。如果用PLC改造继电器控制系统,根
2009-12-08 09:35:36868 根据继电器电路图设计PLC梯形图
PLC使用与继电器电路图极为相似的梯形图语言。如果用PLC改造继电器控制系统,根据继电器电路图来设
2009-06-16 13:44:262601
正在加载...
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论