电子发烧友网报道(文/章鹰)PC行业的诺曼底时刻到来了,在Windows和MacOS盘踞电脑操作系统多年后,华为接连推出全球首款鸿蒙PC和首款折叠鸿蒙PC,它们的出现让世界看到中国给AI PC行业
2025-05-20 09:08:49 9598
9598 
在移动操作系统竞争进入“深水区”的当下,用户对于系统体验的期待早已不再局限于功能的简单叠加,而是追求一种从底层架构革新带来的全方位飞跃。HarmonyOS 6的正式发布,正是这样一次对操作系统
2025-12-31 09:09:4295 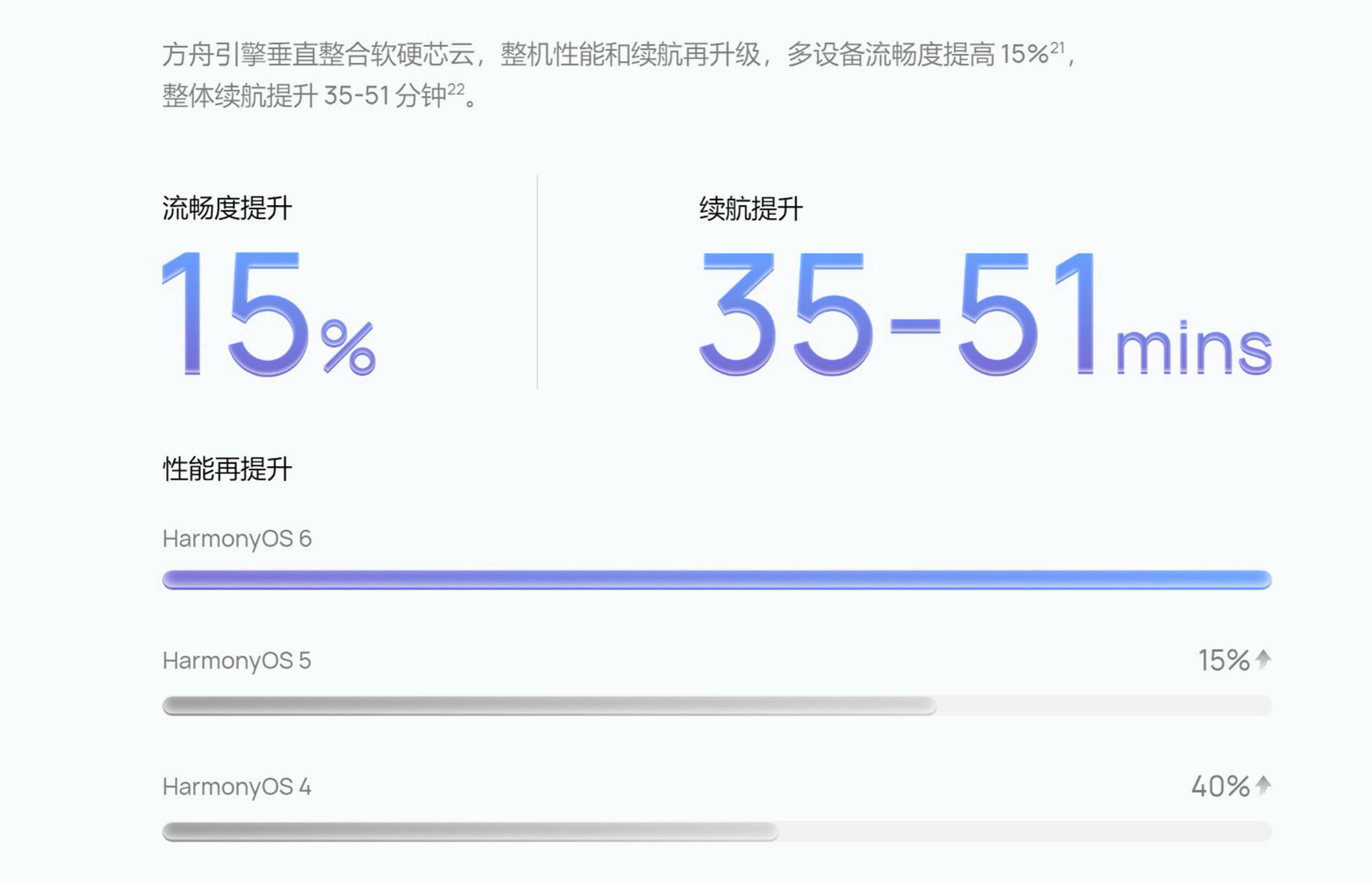
、电力、政务、交通这些“看不见但关键”的领域,你就会明白—— 国产操作系统不是为了重复造轮子,而是为了我们能稳稳地握住方向盘。 1 开源很宝贵,但“可控”更重要 Linux 的强大毋庸置疑,内核稳定、生态丰富、应用广泛,几乎已经成为现
2025-12-25 16:11:13164 人才是产业创新的第一资源,培养本土化的车用操作系统高端人才,对于保障汽车产业供应链安全、赢得未来竞争具有战略性、基础性意义。当前,我国在车用操作系统领域面临跨领域复合型人才严重短缺的挑战,人才供给
2025-12-18 17:11:461015 2025 年 12 月 11 日-12 日,第五届工业操作系统大会在苏州太湖国际会议中心正式召开。本届工业操作系统大会以“AI 赋能,智控领航,新质跃升”为主题,聚焦技术突破、生态协同、行业落地三大核心维度。
2025-12-16 09:13:05327 
、嵌入式操作系统的定义
嵌入式操作系统是专门为资源受限的嵌入式设备(比如 STM32 单片机、物联网模块、工业控制器)设计的微型操作系统,核心作用是:管理硬件资源、调度多任务、提供标准化接口,让开
2025-12-09 10:33:10
前面有讲过竞争冒险的问题,如果有多个进程对文件进行I/O操作,容易产生竞争状态、导致文件中的内容与预想的不一致的问题,由此引入文件锁。
内核提供的锁机制用于对共享资源的访问进行保护,而文件锁是一种
2025-12-08 16:08:50
Lora基站在物联网应用中具有重要的地位。首先,Lora基站可以实现对物联网设备的远程监测和控制,为物联网应用提供了强大的功能支持。其次,Lora基站具有较强的抗干扰能力和较长的电池寿命,可以在恶劣
2025-12-03 07:09:03
11月17日,以“生态共融·智驱未来”为主题的2025龙蜥操作系统大会(OpenAnolis Conference)在北京成功举办。千余位全球技术大咖、业界精英和行业开发者齐聚一堂,深入探讨AI时代下操作系统产业发展的新趋势、新挑战与新路径,共话龙蜥社区引领操作系统创新发展的实践路径与未来展望。
2025-11-20 11:40:13717 2025年11月14-15日,以“智跃无界,开源致远”为主题的操作系统大会&openEuler Summit 2025在北京隆重举办。本次大会由开放原子开源欧拉(OpenAtom
2025-11-20 09:36:35312 
应用。EV10AS180A转换器本身并不直接依赖或支持特定的操作系统,其核心功能是完成模拟信号到数字信号的转换,属于硬件层面的数据处理设备。硬件独立性:EV10AS180A作为一款高性能ADC,其工作原理
2025-11-18 09:18:19
。
RT-Thread :国产开源系统,集成GUI、网络协议栈、文件系统等组件,兼容POSIX接口,适合物联网设备。
嵌入式操作系统
μClinux :针对无MMU处理器设计,支持
2025-11-14 06:18:31
实时嵌入式操作系统(Real-Time Embedded Operating System)是专门设计用于嵌入式系统的实时操作系统。嵌入式系统是一种特殊的计算机系统,通常是用于控制、监测或执行特定
2025-11-13 06:30:43
在linux中,将程序的运行空间分为内核空间与用户空间(内核态和用户态),在逻辑上它们之间是相互隔离的,因此用户程序不能访问内核数据,也无法使用内核函数。当用户进程必须访问内核或使用某个内核函数时,就得使用系统调用(System Call)。在Linux中,系统调用是用户空间访问内核空间的唯一途径。
2025-11-08 12:42:20645 摘要随着物联网和嵌入式系统的发展,实时操作系统(RTOS)的安全性和性能需求日益提高。传统基于C语言的RTOS在内存安全和并发控制方面存在局限,容易导致缓冲区溢出、数据竞争等问题。本项目以
2025-11-07 17:37:326653 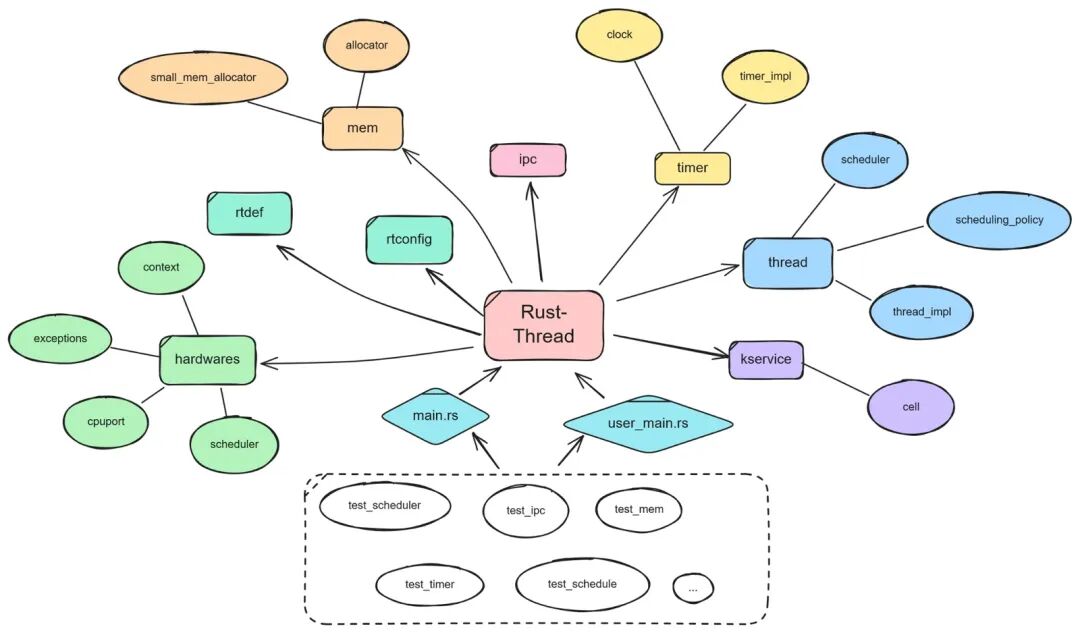
Linux操作系统的十大优势 Linux操作系统作为一种开源、自由的系统,已经广泛应用于个人计算机、服务器、嵌入式设备等多个领域。它的多样化特性和强大的功能使其成为现代计算环境中不可或缺的一部分
2025-11-06 15:32:30177 在qemu上体验芯来RISC-V处理器运行鸿蒙LiteOS-M内核
1.本文概述
2.下载qemu
3.下载鸿蒙LiteOS-M
4.运行与测试
5.gdb调试
1.本文概述
由于前几天
2025-10-31 09:04:54
最近,亮钻多款RK3568/RK3588主板和主机,获得银河麒麟桌面操作系统(工业版)的官方认证,双方产品相互兼容、稳定运行。
2025-10-22 10:49:38732 的关键步骤。学习物联网需要进行实践操作,通过实践操作掌握物联网的相关技术和应用。可以通过购买物联网开发板和传感器,自己动手制作一个简单的物联网系统,通过实践操作掌握物联网的基本技术和应用。
2025-10-14 10:34:26
健康、智能制造等领域。以下是一些常见的职业方向: 物联网工程师:从事物联网系统的设计、开发、测试、维护和升级等工作,包括传感器、无线通信、云计算、大数据等技术的应用。 嵌入式软件工程师:负责开发
2025-10-11 16:40:39
。而所有物联网嵌入式终端设备的核心就是物联网操作系统。行业的发展带动人才的需求,全国高校也在不断探索、改革和深化嵌入式人才培养体系,以满足产业界对嵌入式/物联网系统
2025-09-26 18:19:19466 
一个硬件SPI两个CS操作两个norflash,怎么互斥操作两个norflash,有一个norflash被模拟成U盘,会在中断中操作spi。
2025-09-26 06:18:27
”,站在新的起点上,通过创新与开放,持续为产业创造新价值。鸿蒙智联万物,打造AI原生的全场景终端操作系统;鲲鹏昇腾全面开源开放,为世界提供坚实的算力底座;华为云做智能世界黑土地,加速千行万业智能化;开放、合作、共赢,构建可持续发展的人才生态。
2025-09-20 15:54:431613 我在用nrf24L01官网下载的例程包,用stm32进行开发,串口助手显示互斥锁错误,有朋友遇到这个问题吗
2025-09-10 06:05:21
选择合适的实时操作系统(RTOS,Real-Time Operating System)可能会影响你在不同行业的职业发展路径。
2025-09-09 14:47:41930 大会成功举办。作为中国首个基于6.6内核的商业版操作系统,银河麒麟V11正式发布,以“新架构、新特性、新体验、新价值”为产业注入新动力,这不仅是一次技术飞跃,更是中国操作系统又一划时代之作!
2025-09-04 16:30:58836 近日,龙芯中科受邀参加“麒麟遨天·共承长”2025中国操作系统产业大会,见证银河麒麟操作系统V11的正式发布。龙芯桌面CPU(3A5000/3A6000)、服务器CPU(3C5000/3D5000
2025-09-02 10:44:19740 、位操作(直接决定代码效率),通过 串口通信程序 练手(如单片机与 PC 数据互传)。 硬件基础懂数电模电(逻辑门、放大电路)、常用元件(电阻 / 电容 / 三极管),能看懂 51 单片机最小系统
2025-09-02 09:44:33
2025年8月26日,茅以升科教基金会道路交通委员会发布了2024年度“茅以升科学技术奖—交通运输科学技术奖”表彰决定。其中,由深开鸿等多家单位、企业共同基于开源鸿蒙操作系统开发完成的《公路机电
2025-08-28 19:12:29637 2025年8月26日,茅以升科教基金会道路交通委员会发布了2024年度“茅以升科学技术奖—交通运输科学技术奖”表彰决定。其中,由深开鸿等多家单位、企业共同基于开源鸿蒙操作系统开发完成的《公路机电
2025-08-28 17:40:58874 
实时互动成为关键挑战。 面对电力物联网终端规模大幅增加、设备复杂度提升、协议标准不统一的现状,电力操作系统作为新一代智能终端的“指挥中枢”,正发挥着至关重要的作用。 --- 01 电力操作系统的战略意义 电力操作系统作
2025-08-25 15:57:59458 物联网和智能系统的快速发展,嵌入式成为当前最热门最有发展前途的IT应用领域之一。随着MCU内部的Flash及RAM空间的不断增大,价格越来越低,实时操作系统(RTOS)将成为面向电子系统智能化领域
2025-08-23 10:06:27925 
什么是物联网智库?
2025-08-07 06:45:52
作为润芯微在智能汽车领域的重要成果,启航操作系统通过智慧内生物联网操作系统创新架构,围绕人的生活、出行,开放扩展汽车软硬件生态,极简打造多元智能空间体验,真正实现了人、车、家跨端的连接互通。
2025-08-05 17:12:48851 近日,在 deepin-ports SIG 与超睿科技的合作努力下,深度操作系统 deepin 25 现已能通过搭载主线内核的通用 ISO 镜像,在超睿科技的 RISC-V 桌面主机 DP1000 上成功安装并流畅启动。
2025-08-05 11:27:201124 树莓派操作系统是什么?树莓派操作系统是由树莓派基金会专为树莓派开发的官方操作系统。它基于DebianLinux发行版,并针对树莓派的ARM架构进行了专门优化。树莓派操作系统有多个版本,包括带有完整
2025-07-28 18:26:261024 
科东软件受邀参加“数字化与智能制造技术论坛”,带来“AI+智造”的精彩分享。在“AI+智造”深度融合的时代洪流中,工业操作系统作为底层基座的重要性日益凸显。鸿道Intewell操作系统已成为驱动中国制造业智能化跃迁的关键力量。
2025-07-23 17:02:32470 
,它支持安装在 32 位和64 位 CPU 硬件上。
通常的讲,Linux 这个词本身只表示 Linux 内核,但是人们已经习惯用 Linux 来形容整个基于 Linux 内核的操作系统,并且是一种
2025-07-14 15:28:04
鸿道Intewell操作系统是一款面向工业场景的国产实时操作系统,采用弹性微内核架构,具备强实时性、确定性调度和混合关键系统能力。其技术架构支持纯实时型、实时扩展型及虚拟化型三种部署模式,已成
2025-07-02 15:21:17499 
历经 Preview、Alpha、Beta 三轮社区共创测试,deepin 25 于今日发布亮相!本次版本以 “万物向新” 为核心,四大革新特性全面进化,1000+ 项优化修复落地,为广大开发者与用户朋友们带来更可靠、更流畅、更自由的开源操作系统体验。
2025-07-01 16:57:191171 在科技行业,华为开发者大会向来是备受瞩目的盛会,每一次召开都如同投下一颗重磅炸弹,引发广泛关注与热烈讨论。今年的华为开发者大会更是亮点纷呈,诸多利好消息不断涌现,其中不少内容对教育版SmartEOS操作系统产生了深远影响。
2025-06-30 15:54:46709 如何为 Android 操作系统/设备生成 APK ?
2025-06-30 07:12:45
之间的互联互通。这使得在物联网应用中,多个设备可以协同工作,从而提高了系统的整体效率。总之,物联网蓝牙模块具有低功耗、传输距离远、安全性高、易于集成和支持多设备连接等多种优势,使得其在物联网应用中得到了广泛的应用。随着技术的不断进步,蓝牙模块的性能将会进一步提升,为物联网应用提供更好的支持。
2025-06-28 21:49:31
电子发烧友原创 章鹰 6月20日下午,在华为HDC2025开发者大会上,华为终端BG董事长余承东宣布鸿蒙6操作系统正式发布。鸿蒙6 Beta版也面向开发者正式启动。 鸿蒙6为大家带来全新的全场景互联
2025-06-22 12:13:2410463 
情况;网络通信技术保障数据在不同设备、系统间稳定传输,像 4G、5G 甚至未来的 6G 网络;大数据与云计算技术则对海量的感知数据进行存储、分析和处理,挖掘其中有价值的信息,为决策提供支持。 物联网
2025-06-16 16:01:22
。
智能家居:与人类生活息息相关的智能家居将成为物联网行业的重要发展方向。随着人们对生活品质的追求不断增加,智能家居系统将更加普及,实现家居设备的互联互通。从智能灯光、智能家电到智能安防系统,物联网
2025-06-09 15:25:17
鸿道工业操作系统采用微内核虚拟化架构,将具身机器人大脑和小脑融合,提供了软硬一体技术,不仅降低了电子架构成本和功耗,还提高了系统的实时性和开发效率。此外,该操作系统还提供一站式工具和拖拉拽式编程方式,降低了开发门槛,同时支持C、C++等高级别开发模式,满足深度专业机器人厂家的需求。
2025-05-28 13:51:47365 。而所有物联网嵌入式终端设备的核心就是物联网操作系统。行业的发展带动人才的需求,全国高校也在不断探索、改革和深化嵌入式人才培养体系,以满足产业界对嵌入式/物联网系统
2025-05-26 17:50:22498 
。
四、行业趋势与未来兼容性
1)开源与自主可控
Linux的开源性使其成为企业构建自主物联网生态的首选,避免闭源系统(如VxWorks)的授权限制和安全隐患。例如,华为LiteOS等国产物联网系统
2025-05-26 10:32:12
电机控制、传感器采集等实时数据处理场景。 在LuatOS开发中, 用于实时操作系统(RTOS)相关功能的核心库 ——提供了定时器管理、系统控制、内存监控、路径配置等底层操作接口,为物联网设备提供可靠的实时系统基础支撑。 本文以A
2025-05-21 16:02:27559 
国产操作系统加速崛起——鸿蒙电脑补齐鸿蒙生态最重要拼图 5月19日,首次应用鸿蒙操作系统的个人电脑(PC)在四川成都正式发布。这标志着我国拥有了完全自主可控的电脑操作系统,国产操作系统在个人电脑领域
2025-05-21 11:41:28568 为何要在Windows上模拟树莓派操作系统?在Windows上模拟树莓派操作系统是利用虚拟化技术进行开发、测试和学习,而无需物理树莓派硬件,这是一种强大的方式,并且允许您在WindowsPC上的受控
2025-05-20 16:23:27877 科技作为鸿蒙生态核心共建者,携多款基于警用鸿蒙操作系统的智能终端设备亮相,助力警务工作迎来更智能、更高效的鸿蒙时代。 警用鸿蒙操作系统(警鸿OS)基于开源鸿蒙深度定制,通过创新的微内核架构和分布式技术,实现警务装备间的
2025-05-19 20:26:28612 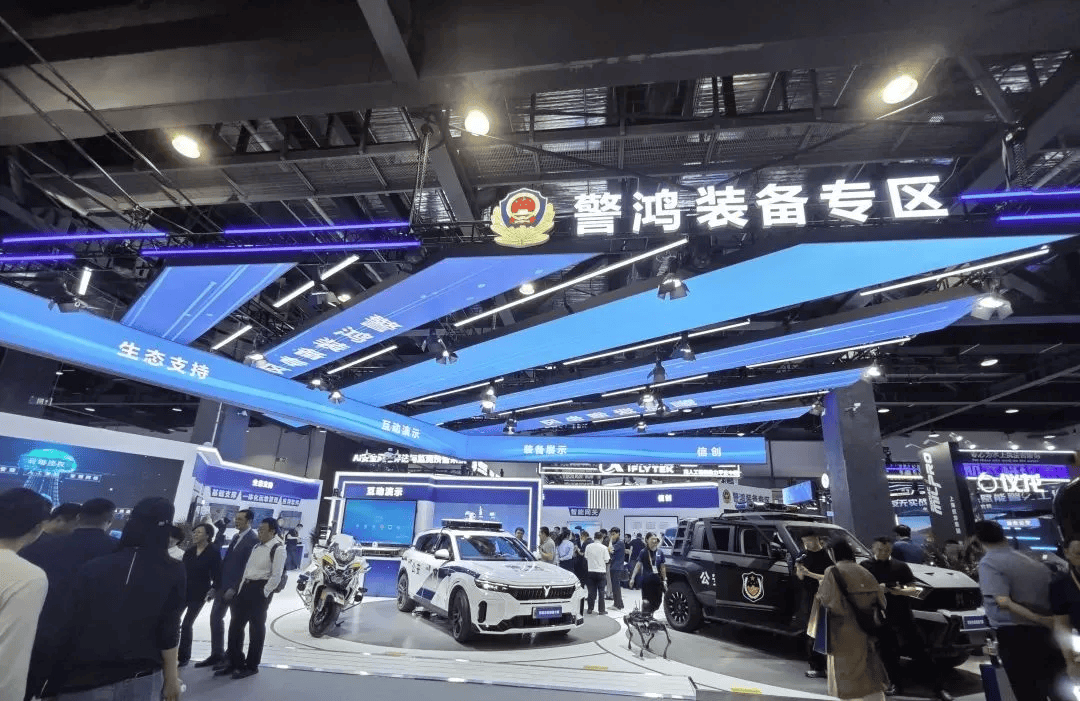
操作系统的实时性赋能东土科技的鸿道(Intewell)工业操作系统作为国内唯一通过汽车、工业控制、医疗、轨道交通四项功能安全认证的系统,为标准体系中的技术层架构提供了底层支持。其微内核虚拟化架构可将人形机器人电子架构成本降低50%、功耗减少60%,并支持算力芯片虚拟化,使大模型运行效率提升40%。
2025-05-16 14:44:20606 ,降低了系统阻塞风险。 在LuatOS开发中,用于实时操作系统(RTOS)相关功能的核心库——提供了定时器管理、系统控制、内存监控、路径配置等底层操作接口,为物联网设备提供可靠的实时系统基础支撑。 本文以Air780EPM模组为例,分享RTO
2025-05-16 13:56:33444 [首发于智驾最前沿微信公众号]在智能网联与生成式AI技术深度融合的浪潮下,汽车操作系统已经从最初的简单资源管理平台,演化为承载感知决策、执行控制与安全防护的智能化中枢。理想汽车自主研发的星环OS
2025-05-13 10:54:251013 
从2021年鸿蒙电脑原型机开始,华为历时五年打磨,正式推出搭载鸿蒙操作系统的鸿蒙电脑,使华为“1+8+N”全场景生态更加完善。从鸿蒙手机、鸿蒙平板,到鸿蒙电脑,华为智慧办公全新升级为鸿蒙办公,华为终端全面进入鸿蒙时代。 从内核
2025-05-08 14:20:015935 
@ohos.net.khMqtt (MQTT物联网通讯协议)
说明:
本模块首批接口从API version 8开始支持。后续版本的新增接口,采用上角标单独标记接口的起始版本。
目前支持3.1.1
2025-05-08 07:51:43
近日,第二十一届上海国际汽车工业展览会现场,开源车用操作系统新版本代码上线仪式在中国电科展台成功召开。全球首个开源智能驾驶操作系统微内核龘EasyAda V2.1和首个规模化、量产级安全车控操作系统
2025-04-30 09:17:13870 近日,普华基础软件开源车用操作系统媒体发布会在上海中国汽车会客厅召开——全球首个开源智能驾驶操作系统微内核龘EasyAda、开源安全车控操作系统小满EasyXMen全新版本正式发布。现场,普华基础软件开源项目技术团队专家就开源项目新版本技术亮点、新增功能及社区治理与运营等进行详细解读。
2025-04-25 16:18:53857 ArkTS语言基础
KaihongOS是面向全场景的万物智联技术底座,在OpenHarmony基础上技术创新和系统能力增强的跨设备的操作系统,它支持多种设备类型。ArkTS是KaihongOS
2025-04-23 06:31:54
近年来,“国产操作系统”这个词越来越频繁地出现在政策文件、企业采购清单和行业新闻里。尤其是在“信创”浪潮下,无论是政府机关还是央企国企,都在加速替换国外操作系统。但面对市面上琳琅满目的国产系统,很多人难免困惑:国产操作系统到底哪家好?政企单位都在用哪些?
2025-04-17 15:34:245839 
鸿道Intewell操作系统是推动新型工业化的国家战略操作系统,是国内首个通过汽车(ISO26262ASIL-D)、工业控制(IEC61508SIL3)、医疗仪器(IEC62304ClassC
2025-04-16 11:40:57960 电子发烧友原创 章鹰 车用操作系统主要包括车控操作系统和车载操作系统两部分,前者负责汽车驾驶相关功能,目前正逐步向智能驾驶方向演变,智能驾驶系统方面,QNX则占据垄断地位;后者用于人机交互和车载信息
2025-04-15 01:16:006220 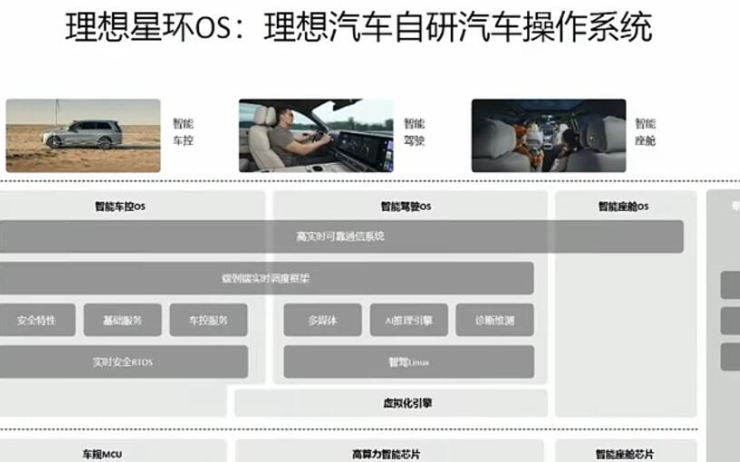
麒麟操作系统 Kylin V10 SP3 是一款基于 Linux 的操作系统,广泛应用于政府、企业和个人用户。本文将详细介绍如何在计算机上安装麒麟操作系统 Kylin V10 SP3,帮助您顺利完成安装并开始使用。
2025-04-11 15:32:353557 
领域专家,围绕具身智能与系统、硬件与内核、云原生与虚拟化等领域探讨最新技术趋势和未来发展方向。其中,近年来愈发重视自主可控操作系统发展的智能汽车领域,也成为本届会议的讨
2025-04-01 21:00:09868 ,还是智能家居系统对环境数据的智能响应,nRF54H20 都能凭借其出色性能,为未来高级终端产品提供强有力的支持。
nRF54L 系列:物联网应用的革新者
去年,Nordic 推出的 nRF54L
2025-04-01 00:18:48
2025年3月,SEGGER发布满足周期定时分辨率要求的下一代安全实时操作系统embOS-Ultra-MPU,该系统基于成熟的embOS-Classic-MPU和embOS-Ultra操作系统构建。
2025-03-31 14:56:151128 近日华为推出首款全面搭载原生鸿蒙操作系统HarmonyOS 5的手机HUAWEI Pura X,标志着华为终端已全面进入原生鸿蒙的时代,预示着华为终端产品将为用户带来更加流畅、智能和安全的使用体验。
2025-03-28 09:38:12823 近日,智芯公司自主研发的“枢纽”操作系统获颁由TÜV南德意志集团(以下简称TÜV南德)授予的功能安全操作系统产品认证证书,TÜV南德大中华区高级经理莅临智芯公司颁发证书。
2025-03-26 14:04:55849 近日,深开鸿自主研发的KaihongOS工业实时操作系统内核,成功通过中国泰尔实验室的检测认证,符合自主自研要求。这标志着深开鸿在操作系统自主研发方面获得了新的成果,有力地推动了国产工业操作系统
2025-03-24 17:02:591033 近日,中国医学装备协会医院物联网分会学术年会第六届医院物联网大会暨医院物联网产品展览会(2025HIOTC),在重庆国际博览中心成功举办。会上,华为数据通信产品线医疗行业解决方案总监康鹏龙发表了题为“星河AI高品质医院网络,加速医院物联网智慧化发展”的演讲,全面展示了华为在医疗行业的创新成果。
2025-03-24 15:02:44980 如果你喜欢用RaspberryPi构建多个项目,那么仅通过更换microSD卡就能切换发行版这一功能简直太棒了。此外,RaspberryPi系列兼容众多操作系统,每个系统都有其独特的优势。随着新款
2025-03-24 14:50:423355 现场层操作系统的自主可控、安全可信问题,助力企业数字化转型,实现工业互联网的数字化、网络化、智能化。鸿道Intewell操作系统源于防务领域的“道”系统,已有30多年技术积累和批量列装经验,广泛应用于百种装备,装机量超过5万套。
2025-03-18 14:52:32790 的基础设施。
数据传输速率和稳健性: 由于 LPWAN 技术通常用于不频繁发送/接收数据的设备,因此许多技术都针对这种使用情况进行了优化。然而,某些操作(如远程固件更新)需要更高的数据传输速率。这正是蜂窝物联网的优势所在,因为它既能满足不频繁的数据传输,也能在需要时提供更密集的数据传输。
2025-03-17 11:42:20
本文立足人工智能时代用户、应用和系统的需求,分析“外挂式模型”演进路径下的操作系统发展困局,提出通过“模型-系统-芯片”的全栈协同设计来构建模型原生操作系统,并进一步探讨了面临的机遇与挑战,以及业界
2025-03-14 17:46:04995 
无法在基于 Windows® 10 物联网企业版的目标系统上使用 英特尔® Distribution OpenVINO™ 2021* 版本推断模型。
2025-03-05 08:32:34
RT-Thread官方将在上海(RT-Thread大本营)发起为期三天的嵌入式操作系统专业培训班!本次培训将会深入讲解RT-Thread嵌入式实时操作系统的核心概念、实战技巧和应用场景!无论企业团队
2025-02-27 17:27:45889 鸿道Intewell操作系统是由科东软件自主研发的新型工业操作系统,历经30多年研发积累,采用微内核架构和自主研发的Hypervisor虚拟化技术,保证系统高实时性、高可靠性。鸿道Intewell
2025-02-27 15:21:111099 鸿道Intewell操作系统是科东软件自主研发的新型工业实时操作系统,历经30多年研发积累,采用业界领先的微内核架构,具备高实时、高安全及强扩展的特性,是目前国内唯一通过汽车、工业控制、医疗仪器、轨道交通四项功能安全认证的操作系统。
2025-02-27 10:08:58699 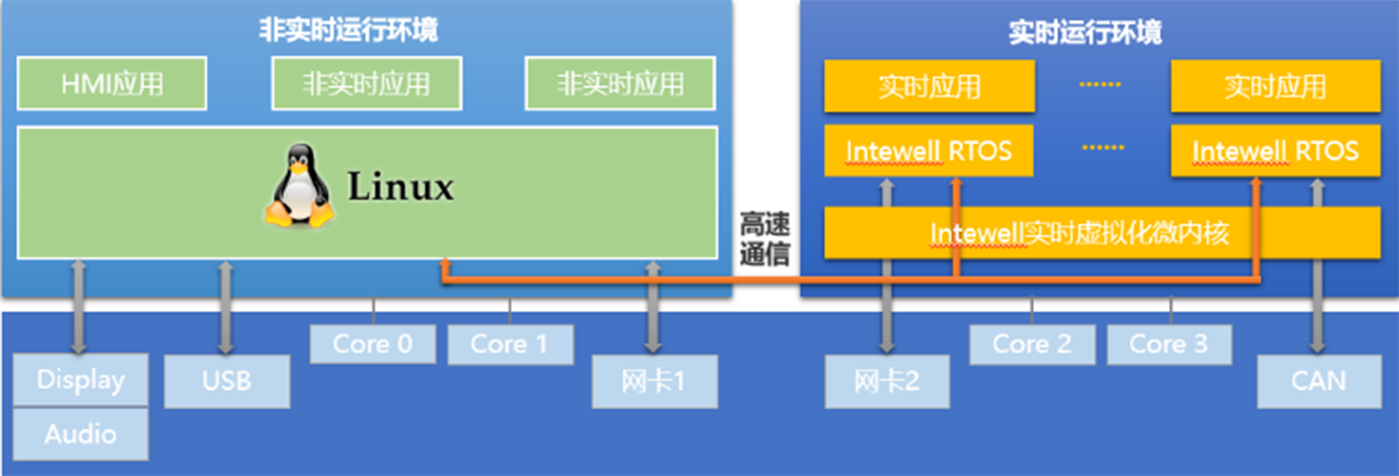
技术与认证中心(CCRC)颁发的EAL5+安全认证,成为我国物联网操作系统内核领域首个获得该国家级权威认证的产品。此次认证彰显了深开鸿在构建自主可控操作系统生态体
2025-02-24 19:26:19837 广泛应用于各类智能设备,HarmonyOS 的每一次动态都紧紧抓住了科技爱好者、开发者以及普通用户的目光。它不仅是华为技术实力的重要体现,更是代表着国产操作系统在全球舞台上的崛起,为万物互联的新时代带来
2025-02-23 16:16:41
鸿道Intewell操作系统采用领先的微内核架构,结合自主研发的Hypervisor虚拟化技术,实现了高实时性、高安全性与强扩展性的完美统一。其独特的Windows/Linux实时扩展架构,支持
2025-02-19 15:03:28786
请问在TI官网购买的am335x开发板能否支持Vxworks操作系统的移植,并进行内核裁剪和BSP开发,是否提供开源的BSP开发源码
2025-02-18 07:02:01
美国对中国芯片实施全方位禁令,从高端到中端,设计到制造,层层设限,试图 “卡脖子”。然而,2023 年中国芯片产业产值不降反升,同比增长超 20%,华为麒麟芯片更是在重重禁令下成功突破。操作系统
2025-02-17 17:08:33916 是机器人感知环境的重要部件,如同机器人的 “眼睛”,能够帮助机器人获取周围环境的三维信息、识别物体和障碍物等,为机器人在复杂环境下的导航、避障和操作提供了关键支持。
传感器技术应用拓展:随着物联网
2025-02-04 06:48:00
有关文档介绍也是比较繁杂,而本书从一个整体的系统性的角度描述了鸿蒙操作系统,从第1章读到第4章的整个感觉浑然天成,特别是在 HarmonyOS LiteOS_M 内核部分内容的描述,让我一般参照源码一边理解书中描述的内容,确实受益匪浅。
2025-01-31 11:33:31
非常有幸能够获得发烧友的华为鸿蒙系统书籍的阅读资格,自己从事嵌入式软件多年,但是对于操作系统的了解还是比较少的,一直从事MCU的部分开发任务,近两年随着中美关系的紧张化,国产化的操作系统以及国产化
2025-01-25 11:05:42
日前,DeepEdge10芯片已成功完成与国产鸿蒙操作系统的适配工作,标志着该芯片在边缘场景应用领域实现了供应链及操作系统层面的全面国产化安全。 为实现这一适配,技术团队已构建起针对鸿蒙操作系统
2025-01-24 15:31:371406 日前,DeepEdge10芯片已完成国产鸿蒙操作系统的适配。目前已构建适配鸿蒙的芯片编译平台框架,完成图形等子系统的适配。基于DeepEdge10的鸿蒙操作系统桌面环境已经可以成功启动,系统原装应用可顺利运行。
2025-01-24 10:14:181831 领域打造安全创新操作系统产品,现已形成桌面操作系统、服务器操作系统、万物智联操作系统、工业操作系统、智算操作系统产品等为代表的产品线,达到国内最高的安全等级,支持飞
2025-01-24 09:14:294536 
云服务器选择什么操作系统好?选择云服务器操作系统需考虑业务需求、兼容性、安全性、易用性及成本。Linux系统如CentOS、Ubuntu和Debian因稳定、免费且社区支持强大而受欢迎;WindowsServer适合运行特定Windows应用,但成本较高。以下是UU云小编对几种主流操作系统选择的详细介绍:
2025-01-21 10:56:02811 如涉及以下场景,需提前完成相关产品的开通或配置操作。如不涉及,则不需要配置。
场景一:产品开通操作
部分支付场景接入涉及产品开通,未开通产品直接接入,商户请求华为支付开放的API接口时可能会导致
2025-01-21 10:30:15
工业化服务,已应用于芯片生产线、飞机、高铁、电网,机器人、数控机床、汽车电子等领域。鸿道Intewell工业操作系统自推出以来,屡获国内国际权威认可,其功能和性能可以替代VxWorks操作系统,并通过工信部电子五所测试内核及部分关键代码私有代码率100%。
2025-01-16 16:19:22886 近日,积鼎科技的两款核心流体仿真软件VirtualFlow 和 CFDPro 成功通过华为鲲鹏处理器和欧拉操作系统的国产化适配,双方将携手共建自主可控的信息技术产业生态新篇章。
2025-01-15 10:42:551208 
架构师: 负责制定物联网解决方案,设计物联网系统的整体架构,对于整个系统的稳定性、安全性和性能负有重要责任。由于技术要求较高,该岗位通常享有丰厚的薪资待遇。
物联网数据分析专家: 负责对大量物联网数据
2025-01-10 16:47:57
科东软件:国产嵌入式OS龙头科东软件是国内嵌入式实时操作系统的领军企业,其自主研发的鸿道Intewell操作系统可替代VxWorks等海外产品。鸿道Intewell与“道”系统一脉相承,科东软件鸿道
2025-01-10 13:57:36853 RT-Thread官方将在河南-郑州发起为期三天的嵌入式操作系统专业培训班!本次培训将会深入讲解RT-Thread嵌入式实时操作系统的核心概念、实战技巧和应用场景!无论企业团队/工程师是刚接触
2025-01-09 18:46:381430 普华灵智安全车控操作系统(AUTOSAR CP)和普华灵思智能驾驶操作系统(AUTOSAR AP)已与黑芝麻智能武当C1200家族芯片完成适配。
2025-01-06 14:16:421304 
 电子发烧友App
电子发烧友App











 工商网监
工商网监
评论