使用加速度传感器与陀螺仪来精确推算出具体的位置。爱普生(EPSON)就基于这种环境,研发出了这一款高精度导航陀螺仪——XV7001BB。
2024-03-20 09:36:56 68
68 
EPSON除了有源无源晶振、实时时钟模块以及可编程晶振让大家广为熟知,并且它的陀螺仪传感器技术也在相关领域成为了基石,承担着举足轻重的作用,今天就让南山电子小编来带大家了解一下爱普生(EPSON)应用于割草机惯性导航高性能陀螺仪传感器SGPM01。
2024-03-19 11:38:5558 
STM32H743VGT6用来测量秒误差能达到的最高精度是多少
2024-03-14 07:26:46
以激光陀螺仪为核心部件的导航系统是一种惯性导航系统,相对于大家耳熟能详的GPS和北斗等卫星导航系统,熟知惯性导航系统的人很少。
2024-02-23 18:09:091201 据麦姆斯咨询报道,近期,惯性传感器研发商原极(上海)科技有限公司(简称:原极科技)获得数千万元A轮投资。
2024-01-23 09:39:21393 
漂移误差、随机误差、系统误差这三种误差到底是怎么引发的?如何对矢量网络分析仪校准呢? 漂移误差、随机误差和系统误差是在矢量网络分析仪(简称VNA)测量过程中可能出现的三种误差类型。它们的引发原因和解
2024-01-19 15:42:16201 关于惯性测量单元的应用场景阐述
2024-01-19 11:25:22288 无锡瑞吉星电子的RJX-IMU-164系列;
参数如下:
一 、概述
RJX-IMU-16460高精度惯性测量单元是一款小型高精度MEMS惯性测量单元,可与ADIS-16460实现原位插拔替换、内部
2024-01-18 13:46:16
据麦姆斯咨询报道,综合电子元器件全球制造商村田(Murata)近日发布了一款新的6轴MEMS惯性传感器SCH16T-K01,可实现高精度机器控制和定位应用。
2024-01-17 09:59:57483 
量程内所引入的偏差。由于数字电压表采用了分段模拟量程或模块化模拟量程的方式,量程上存在许多切换开关和电阻等元件,这些元件的特性会引入一定的误差。此外,电阻器的精度以及切换开关的接触不良等因素也会导致量程误差的产生
2024-01-16 15:35:48248 编辑:镭拓激光小幅面精密激光切割机是一种高精度的加工设备,切割精度是衡量性能重要一项。切割精度误差范围的大小直接影响到加工质量和生产效率。解和掌握小幅面精密激光切割机的切割精度误差范围对于实际应用具
2024-01-16 11:17:08118 
一般描述M-G552PJ1是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角速率和线性加速度,并提供了高稳定性和高精度的测量能力与使用的高精度补偿技术。通过控制器局域网(CAN)接口
2024-01-12 10:56:27 0
0 M-G370PDS0是一个小的形状因子惯性测量单元(IMU),具有6个自由度:三轴角率和线性加速度,并提供高稳定性和高精度的测量能力精密补偿技术。各种校准参数被存储在IMU的存储器中,并且是
2024-01-11 09:55:450 AD转换器具有很高的精度和准确性,但它们仍然会存在误差。本文将详细探讨AD转换器产生误差的原因。 第一,量化误差是AD转换器最主要的误差源之一。当模拟信号被离散化为数字信号时,模拟信号的连续幅度范围会被划分为一系列的离散量化级别。量化误差是指模拟信号的实际值与离
2024-01-09 11:02:48455 工程监测中振弦采集仪的精度校正与误差分析 工程监测中,振弦采集仪是一种常用的测量设备,用于测量结构物的振动情况。为确保测量结果的准确性,需要对振弦采集仪进行精度校正和误差分析。 工程监测中振弦采集
2024-01-05 14:49:12118 
在对LTC6806的芯片测试后转换出的结果与实际有较大误差,在±50mv左右,请问在操作中哪些问题可能造成转换后的精度较差?同时通过辅助寄存器读到的2nd Reference Voltage约为2.9V,实际测量为2.5V,请问是否与之存在关系。
2024-01-04 08:02:43
,电流有效值:1.140A,PF值0.973,有效功耗:259.1W
其中电压有效值有1-5V的误差,有效功耗也有误差,但此数据是未进行校正的,请问正确吗?
未校正的精度能达到多少呢?谢谢
2023-12-26 07:55:11
伺服位置误差大的原因及解决方法 伺服电机是一种精密控制装置,可以实现高精度、高稳定性的位置控制。然而,伺服电机在使用过程中常常出现定位误差过大的问题。本文将从机械结构、控制系统、环境因素、测量误差
2023-12-25 13:57:521840 关于AD9748精度问题,根据PDF介绍高5位开关32路电流总和,低3位为八分之一的每一路Ic,也就是说低三位是决定最小精度分辨率的,为什么在使用过程中输入控制字0x8,0x9,0x0A,输出电压
2023-12-22 07:50:36
。然而,由于电路中的元件本身的内部阻抗以及其它因素,会导致在电压分压过程中出现一定的误差。在没有电压跟随器的情况下,我们可以采取一系列的方法来降低误差。 首先,我们可以选择使用更高精度的电阻元件。在电路分压中,电阻
2023-12-20 15:35:48377 和采样保持,如果选的参考源很好的话AD精度就会提高,外置的采样保持器往往比AD内部的采样保持器要好。
我的问题是:ADC的所有误差都有哪些?有没有这种讲所有误差并且有公式的资料没?我想计算下,再和实际的电路结果对比下,看看哪里可以改进。谢谢各位大牛!
2023-12-19 08:04:46
AD7793的参考电路CN0355中的5%精度电流源通过5K电阻转换成1.05V的参考电压,而这个电压通过ADA4096放大10倍成为压力电桥的恒压电源,请问这个误差放大后是如何抵消的?
2023-12-08 08:24:11
数据转换器中的噪声与误差之间有什么关系,在设计中该如何考虑这两者,比如说我在设计时应该考虑ADC的失调和增益误差,还是考虑ADC的SNR?
2023-12-07 08:06:19
关于惯性导航的7大误解
2023-12-04 15:32:25254 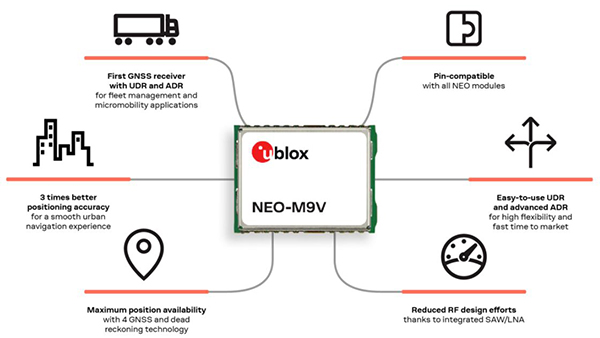
输入误差。输入误差通常由输入信号的不确定性以及输入电压测量误差引起。输入信号的不确定性包括信号源的频率漂移、幅度波动以及相位误差等。输入电压测量误差主要由输入电压测量电路引起,包括电压测量仪器的精度问题以及电
2023-12-01 11:51:161745 你好,关于AD4114 噪声误差 我没有找到SNR、ENOB等参数,应如何计算?
2023-12-01 06:19:46
导航的方法和手段有许多,最传统的是航图导航,最流行的是卫星导航,最具独立性的是惯性导航;无人机上用到的是卫星导航和惯性导航。
2023-11-29 11:41:241111 
电子发烧友网站提供《使用ADIS16470和PNI地磁传感器RM3100构建的捷联惯性导航系统.pdf》资料免费下载
2023-11-22 10:34:480 华测导航推出的新一代cgi-430高精密惯性导航系统以系统全体频率的gnss基础卡和6轴战术级imu为基础,使用中国领航员的新一代贴合算法引擎,结合gnss、ins、dr信息进行计算。
2023-11-14 14:34:02552 pcb线路板的烘烤工艺解说
2023-11-10 14:11:35728 在被动微流控方法中,惯性微流控因具有简单、易于制造和高通量的特性而被认为是一种良好的过滤和分离方法。
2023-11-02 09:09:38259 
在组合导航系统中,IMU提供快速、实时的运动和姿态信息,但IMU存在累积误差,通常会与卫星定位结合使用,对IMU的数据进行校准,提高长期的导航精度。
2023-11-01 15:38:281337 
直线导轨的误差匹配度是评估导轨之间配合精度的重要指标,导轨之间的配合精度越高,误差匹配度就会越好,反之则越差。
2023-10-31 17:48:05619 
关于RL78/G13系列R5F100BEANA产品ADC采集误差过大的问题
2023-10-30 17:20:36385 
电路设计中偏置电流是如何引起误差的呢? 在电路设计中,偏置电流是一种非常重要的参考电流,它被用来控制电路的工作状态。然而,偏置电流也会引起误差,这些误差可能会对电路的性能和精度产生不利影响。 偏置
2023-10-30 09:12:08338 的影响。 一、ADC失调误差的计算 先来了解什么是ADC失调误差。ADC(Analog-to-Digital Converter)将模拟信号转换为数字信号,其中一个重要参数是ADC转换精度。ADC失调误差就是ADC转换精度不准确的现象。 ADC失调误差又可以分为偏置误差和增益误差两种。其中,偏置误
2023-10-25 11:50:35320 ,随着MEMS陀螺仪的兴起,在车辆导航、机械控制等领域,精确导航的竞争一直在对峙。 导航核心——陀螺惯性测量单元 在高精度的捷联惯导系统中,陀螺惯性测量单元是绝对的核心。很长一段时间以来,激光陀螺仪都是中高精度惯导系统
2023-10-24 01:11:001283 转换的应用中,ADC的精度影响到整个系统的质量和效率。为了能够达到应有的精度,用户需要了解ADC误差是如何产生的和影响它的参数。转换精度不是仅仅依赖于ADC模块的性能和功能,它与该模块周边应用环境
2023-10-10 06:26:23
什么是高精度地图
高精度地图:(1)是和普通导航电子地图相对而言的服务于自动驾驶系统的专题地图(2)是包含道路形状、道路标记、交通标志和障碍物等地图元素(3)是涵盖道路交通状况实时动态信息,(4
2023-10-07 14:24:35
详细解说pcb板表面绝缘层
2023-09-28 09:55:541494 前文《 深度剖析GNSS高精度定位原理 》介绍了高精度卫星定位技术相关原理,本文继续展开介绍RTK定位原理及误差解析。目前主流民用卫星定位技术在城市这种复杂场景下的定位精度通常为几米到几十米,而实现一些特殊应用的理论定位精度要逼近厘米级。那么该如何实现定位精度数量级的提升?
2023-09-28 09:19:093685 
由于视觉导航技术的应用越来越普及 ,因此 ,有必要对视觉导航中的关键技术及应用进行研究。文章对其中的图像处理技术和定位与跟踪技术进行了详细研究 ,并与此相对应 ,介绍的相关的应用。
2023-09-25 08:09:38
机构指出,GNSS/IMU的组合导航系统,可充分发挥GNSS长期高精度性能和IMU短期高精度性能的优势,为自动驾驶汽车提供连续、高精度和高可靠的位置信息。MEMS IMU作为一个重要的传感器应用领域
2023-09-20 08:46:54252 电子发烧友网站提供《HPM系列MCU 高精度ADC之误差分析和设计指南.pdf》资料免费下载
2023-09-19 15:45:340 A:ZPM正在面向高性能大众市场开发惯性测量单元(IMU)及传感器。我们申请专利的技术方案结合了MEMS和硅光子学技术来测量加速度和角速率,其噪声相比传统的MEMS电容式测量方案低100-10000倍。
2023-09-18 15:32:28294 卫星发射的信号,实现完成定位导航等服务功能。
因为这个芯片关乎到定位的精度与否,而且使用场景也很复杂,这就给其射频前端提出了很高的要求;其次,又因为这些芯片很多情况下需要应用到由电池供电的移动设备上
2023-09-18 14:14:31
快乐解说MCU:CW32的工作电压特性
2023-09-18 10:56:25240 ,广和通将携手华大北斗在标准精度单双频定位、高精度RTK、惯性导航定位等GNSS产品类型上进行合作。融合华大北斗卓越的芯片级高精度定位技术与广和通模组研发及推广能力,多款高性能GNSS模组产品将快速
2023-09-13 09:58:17
电子发烧友网站提供《Xilinx:关于PTP精度的最佳平台.pdf》资料免费下载
2023-09-13 09:28:090 ST的ISM330DLC系统级封装将3D加速度计和3D陀螺仪相结合,是专为符合工业4.0要求而设计的最新一代高性能6轴MEMS惯性模块。ISM330DLC具有一流的精度和灵活性以及超低功耗,可满足
2023-09-13 08:15:12
高精度GNSS定位定向模组M20D结合了全球导航卫星系统(GNSS,如北斗、GPS)和惯性测量单元(IMU)的技术,以实现无人配送车的导航和定位。下面是M20模组实现无人配送车导航定位
2023-09-11 18:01:04470 
惯性导航系统是一种利用惯性测量单元(如加速度计和陀螺仪)来测量和跟踪物体位置、方向和速度的技术。在无人驾驶领域,惯性导航系统通常与卫星导航系统(如北斗、GPS)结合使用,以提供更高精度和更可靠的定位
2023-09-11 17:56:101271 
应用提供高精度、高灵敏性、低功耗的解决方案。
• 支持所有民用导航卫星系统,支持北斗三号信号体制
• 同时接收 L1、L5 双频多模信号
• 显著提高卫星定位精度至亚米级,优异的抗多径干扰功能提升城市峡谷中场景下定位表现
• 高集成度表贴模块,最优性价比高精度定位方案
*附件:TAU1201.pdf
2023-09-11 09:36:56
5月18日,中国卫星导航定位协会在京发布《2023中国卫星导航与位置服务产业发展白皮书》。白皮书显示,2022年我国卫星导航与位置服务产业总体产值达到5007亿元人民币,较2021年增长6.76
2023-09-11 09:35:53
ALLYSTAR 北斗高精度定位终端是一款支持 5G 通讯、集 GNSS 导航技术、惯性传感技术于一体的车载智能终端。基于华大北斗自研的全系统多频低功耗高精度 GNSS 芯片,结合高精度 GNSS
2023-09-08 14:29:58
高端工业级PDA普遍具备高精度的导航定位功能,支持GPS定位信息获取、GPRS信息传输、GIS显示、GPS导航等。 由于工业级PDA实际作业场景中存在各种干扰源,如电磁干扰、温度变化等,这些干扰源会对导航定位功能的精度产生负面影响。为保
2023-08-28 11:38:05331 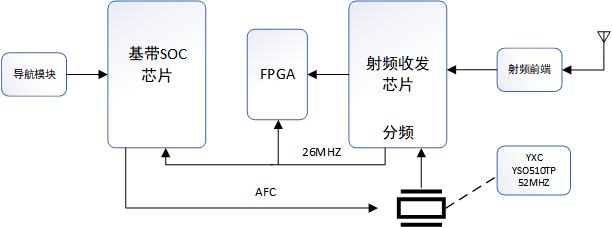
发射的信号,并通过计算信号传播时间来确定自身位置。 高精度定位:GNSS导航系统可实现高精度的定位,当使用差分GPS或RTK技术时,定位精度可以达到厘米级别,使得无人机在复杂环境中也能精确飞行和定位。 惯性导航:M20D定向模组集成了惯性导航系统,其中包括陀螺仪和
2023-08-25 17:23:131817 
INS-811是一款高性价比车规级组合导航定位系统,内置集成了战术级6轴MEMS惯性测量单元和RTK功能的高精度卫星定位模块,能够在各种严苛环境中实时提供位置、航姿、速度信息,也可以提供加速度
2023-08-24 17:21:35702 
M21 模组基于北云科技新一代 22nm 制程高性能车规级 GNSS SOC 芯片 Alice 研制内置高精度测量引擎、导航引擎、惯性导航单元以及功能安全引擎,符合 ASIL B 功能安全等级,支持
2023-08-23 18:39:19331 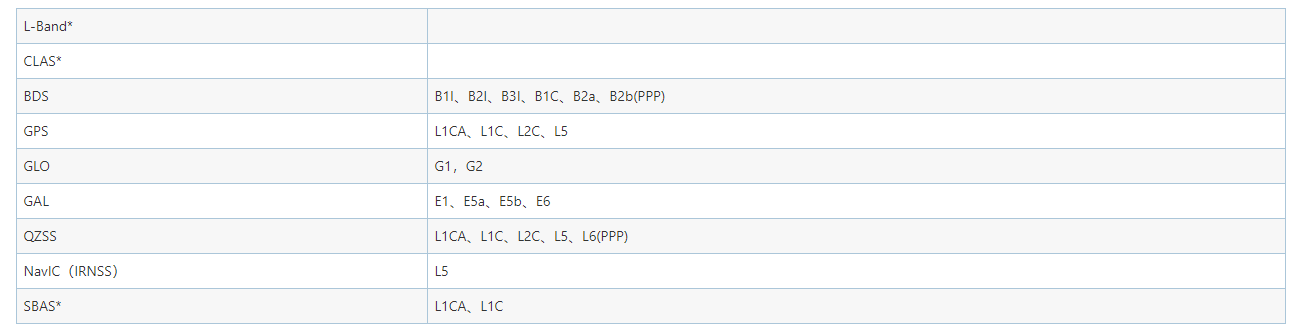
高端工业级PDA普遍具备高精度的导航定位功能,支持GPS定位信息获取、GPRS信息传输、GIS显示、GPS导航等。
2023-08-23 09:42:18206 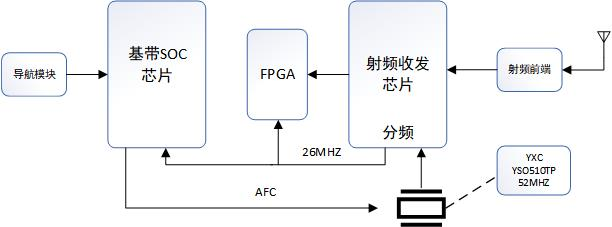
GNSS是一种由多颗卫星组成的导航系统组成,GNSS在无人驾驶中扮演着至关重要的角色。GNSS接收机中高精度定位模组M22,通过接收卫星信号发送精确的定位和时间信号,使得地面接收设备可以准确地确定
2023-08-22 18:20:241570 
惯性导航技术是惯性技术的核心和发展标志,惯性导航系统 (Inertia navigation system,INS) 利用陀螺仪和加速度计 (统称为惯性仪表) 同时测量载体运动的角速度和线加速度,并通过计算机实时计算出载体的三维姿态、 速度、 位置等导航信息。
2023-08-22 09:56:072984 
时间来确定自身位置。 高精度定位:GNSS导航系统可实现高精度的定位,当使用差分GPS或RTK技术时,定位精度可以达到厘米级别,使得无人机在复杂环境中也能精确飞行和定位。 惯性导航:M20D定向模组集成了惯性导航系统,其中包括陀螺仪和加速度计等传感器。这些传
2023-08-21 17:45:05523 
这个陀螺状的设备叫高级惯性参考球 (AIRS)制导系统,是“和平卫士”洲际弹道导弹导航系统的核心。马丁·米勒在《大规模杀伤性武器:核时代的幽灵》一书中这样评价:AIRS重新定义了洲际弹道导弹的精度概念。
2023-08-11 11:21:43386 与惯性导航系统相比, 天文导航系统误差不随时间积累, 而与GPS等无线电导航技术相比又不易受到欺骗、干扰和破坏. 目前, 现代天文导航系统主要以星敏感器、紫外月球敏感器和红外地球敏感器作为
2023-08-10 10:10:531881 
:
1.支持所有民用导航卫星系统,支持北斗三号信号体制(B1C,B2a)
2.同时接收L1、L5双频多模信号
3.显著提高卫星定位精度至亚米级,优异的抗多干扰功能提升城市峡谷仲场景下定位表现
4.高级
2023-08-09 15:30:20
STM32H743VGT6用来测量秒误差能达到的最高精度是多少。
2023-08-09 07:24:33
本篇文章列出了影响模数转换精度的主要误差。这些类型的误差存在于所有模数转换器中,转换质量将取决于它们的消除情况。STM32微控制器数据手册的ADC特性部分规定了这些误差 值。规定了STM32 ADC
2023-08-04 10:35:201197 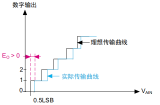
;精度;误差所谓加工精度是指零件加工后的几何参数(尺寸,几何形状和相互位置)与理想零件几何参数相符合的程度,他们之间的偏离程度则为加工误差。加工误差的大小反映了加
2023-07-31 22:31:48556 
精度高、定位范围广和误差不随时间累积等优点,但其自主性差、易受外界遮挡和干扰、接收机数据更新频率低等缺点。因此工程上常常将两者互补结合使用,组成卫星/惯性组合导航系统。
2023-07-23 17:17:05652 
MEMS(微机电系统)是指集机械元件、微传感器、信号处理与控制电路、接口电路、通信和电源为一体的完整的微机电系统。MEMS惯性传感器可以组成低成本的INS/GPS组合导航系统。它是一种非常适合构建小型捷联惯导系统的惯性传感器。MEMS惯性传感器的突出特性使其在许多民用和军事领域具有广阔的应用前景。
2023-07-19 09:21:571286 陀螺仪和加速度计是IMU的主要部件,其精度直接影响惯性系统的精度。在实际工作中,由于各种不可避免的干扰因素,陀螺仪和加速度计会产生误差。从初始对准开始,其导航误差随着时间的推移而增大,尤其是位置误差
2023-07-14 13:45:421987 关于安全光幕PNP和NPN解说
2023-07-14 10:34:521898 
据麦姆斯咨询报道,近期,无锡凌思科技有限公司(简称:凌思科技)宣布其开发的IMU500高精度汽车级MEMS惯性测量单元(IMU)已开始批量生产。
2023-07-14 10:17:26338 惯性系统是一种自主航位推算导航系统,它利用惯性传感器、参考方向和初始位置信息来确定载体的方位、位置和速度。它至少应包括一个惯性测量装置、一台数字计算机、一个控制显示装置和一个专用精密电源。
2023-07-06 15:24:522282 
惯性导航系统(Inertial Navigation System,Ins),顾名思义,是利用惯性定律,来进行位姿推算的导航系统。
2023-07-03 16:23:18455 
定位消除了星钟误差,对于在距离基准站1000km的用户,可以消除星钟误差和对流层引起的误差,因而可以显着提高动态定位精度。
**GNSS导航优点:**通常用于室外远距离的跟踪和制导,其精度取决于卫星在
2023-06-28 09:52:41
等;对表面之间的相互位置而言,就是绝对的平行、垂直、同轴、对称等。零件实际几何参数与理想几何参数的偏离数值称为加工误差。 1、简介 加工精度主要用于生产产品程度,加工精度与加工误差都是评价加工表面几何参数的术语。
2023-06-26 15:30:35682 动作捕捉系统的一般性结构主要分为三个部分:数据采集设备、数据传输设备、数据处理单元,惯性式动作捕捉系统即是将惯性传感器应用到数据采集端,数据处理单元通过惯性导航原理对采集到的数据进行处理,从而完成运动目标的姿态角度测量。
2023-06-26 10:17:46694 INS622-2A是一款标准车载组合导航定位系统,内置集成了战术级6轴MEMS惯性测量单元,具备RTK功能高精度GNSS定位模块及车载里程计实现组合导航。能够在各种严苛环境中实时提供组合后的位置、航姿、速度信息,也可以提供加速度、角速度等信息。
2023-06-13 16:44:51704 
定位几大类。其中地图匹配定位技术利
用道路物理信息与预制高精度地图,实现实时的自动驾驶定位。在卫星定位、惯性导航系统出现明显误差时,地图匹配定位技
术可为自动驾驶系统提供实时定位修正信息,因此对自动驾驶系统至关重要。
2023-06-07 10:31:550 航空导航技术最大的优点之一是它的精度。这些系统结合了GPS、imu和主机搭载的其它类别的传感器,以令人难以置信的精度计算出车辆的位置。重要的是,还告诉系统:我们对任何时间点的数据的精度是有多可信耐的。这在自动驾驶汽车中尤为重要,因为即使是很小的位置误差也可能是灾难性的。
2023-06-02 16:32:36322 自动驾驶中,一般用到的导航定位技术包括,惯性导航以及GPS定位导航,惯性导航一般用到IMU,此外为了进一步确保定位
的可信度,还会采集轮速,进行航迹推演,最终实现多重定位的融合。
2023-06-01 16:14:050 ANELLO GNSS惯性导航系统(INS)在GPS拒止环境里可提供长达30分钟的连续精确的航位推算。
2023-05-29 09:57:05466 
为确保系统满足所需的精度规范,透彻了解不同的误差源非常重要。决定信号链精度的最关键要素之一是A/D 转换器 (ADC),这是本文的重点。请记住,ADC 的精度可以用绝对精度、相对精度和总未调整误差 (TUE)来表征。
2023-05-22 11:39:071525 
为确保系统满足所需的精度规范,透彻了解不同的误差源非常重要。决定信号链精度的最关键要素之一是A/D 转换器 (ADC),这是本文的重点。请记住,ADC 的精度可以用绝对精度、相对精度和总未调整误差 (TUE)来表征。
2023-05-15 14:06:104338 
、三轴陀螺仪、三轴加速度等;通过在线的自适应组合导航算法,SKG123ND提供实时高精度的车辆定位、测速和测姿信息,在GNSS系统的信号精度降低甚至丢失卫星信号时,不借助里程计信息,SKG123ND利用纯惯性导航技术,也可在较长时间内单独对汽车载体进行高精度定位、测速和测姿。模块可以直接
2023-04-28 15:30:432 、三轴加速度等;通过在线的自适应组合导航算法,SKM-6DM提供实时高精度的车辆定位、测速和测姿信息,在GNSS系统的信号精度降低甚至丢失卫星信号时,不借助里程计信息,SKM-6DM利用纯惯性导航技术,也可在较长时间内单独对汽车载体进行高精度定位、测速和测姿。模块可以直接输出
2023-04-28 15:27:370 陀螺仪是测量角速率的一种器件,是惯性系统的重要组成部分,主要用于导航定位、姿态感知、状态监测、平台稳定等应用领域。MEMS陀螺仪的核心是一颗微机械(MEMS)芯片,一颗专用控制电路(ASIC)芯片及应力隔离封装。
2023-04-28 09:59:135507 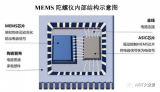
GPS模块的运行需要接收来自导航卫星的信号,经过处理后反馈到车辆导航仪等设备上,这个过程是设备自行运转的,人员无法参与其中,因此存在容易造成GPS定位精度不够的因素。
2023-04-17 15:34:30765 
现在精度最好的imu一个小时会累积几十米的误差,价格上百万美元,用在洲际弹道导弹上的(你老板买得起?)。几万美元价位的imu,一分钟的位置误差计算下来大概是5米,注意是一分钟,由于加速度二次积分后,得到的位置与时间是二次关系,即位置误差随时间呈抛物线增长。
2023-04-06 10:14:252065 车载导航mcu的作用是控制汽车中的导航系统。作为汽车导航控制系统的核心,导航mcu必须有着耐高温和坚固的特性,使之在复杂的汽车内部环境中不容易损坏。 汽车mcu有什么作用mcu是Motor
2023-03-27 14:25:34
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论