 电子发烧友App
电子发烧友App


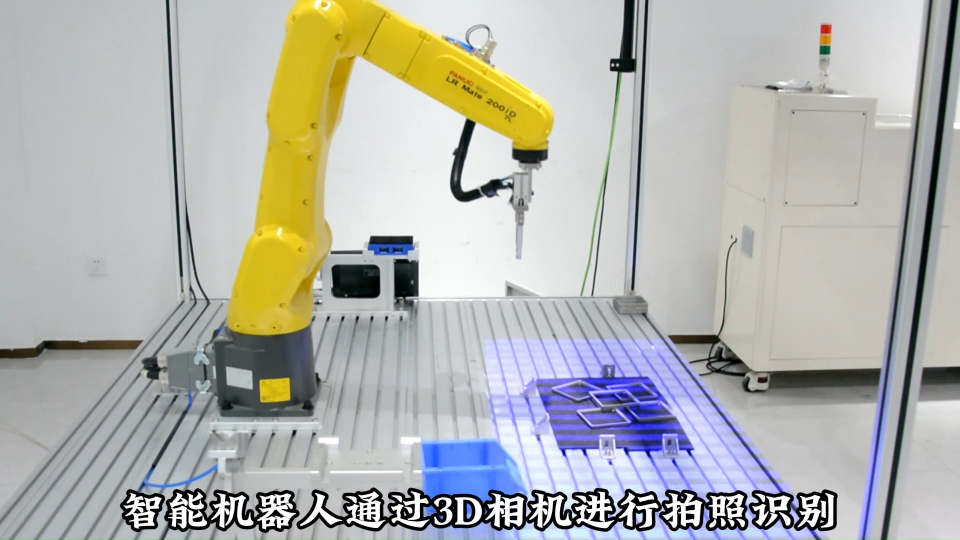
给机器人一双“明亮的眼睛”—— Pickit 机器人3D视觉系统
- 机器人(200947)
- 3D视觉(27281)


相关推荐

机器视觉运动控制一体机在光伏汇流焊机器人系统的解决方案
生产线的柔性和自动化水平。此外,我们的解决方案通过降低废品率有效减少能源消耗,助力实现环保和可持续发展目标。借助我们高度集成的硬件和易用的RTFuse机器人系统平台,让客户享受到快速的投资回报,真正实现高效、环保的智能制造。
2024-02-28 15:01:45

机器人激光焊接机
产品特点1、适合于大幅面空间焊接,机器人智能化操作,灵活可靠,可以六轴联动,可任意空间焊接,不局限于平面焊接;2、可以根据生产需求而定制夹具;3、实现双工位或多工位焊接操作,节省产品安装夹具时间
2024-01-04 13:57:58
【开源项目】Emo:基于树莓派 4B DIY 能笑会动的桌面机器人
置于底座上,并为电源线的自由移动预留了充足的空间。为了提高机器人运动的稳定性,我们还特意使车身与底座轻微接触。
另外,我们特意选择蓝白配色方案,因为蓝白组合能提升机器人的视觉吸引力。
3D 打印
我们
2023-12-26 15:18:26
开源项目!教你如何复刻自平衡赛车机器人、智能家居中控、竞技机器人先进模糊控制器等
开源项目作品
为了方便大家更好提升自己,电子发烧友小编为大家整理了一些工程师大佬设计的开源项目作品,供大家可以参考学习,希望对广大工程师有所帮助。
1.用全志R128复刻自平衡赛车机器人,还实现
2023-12-26 09:17:46
LabVIEW的六轴工业机器人运动控制系统
将系统分为算法实现和仿真模块、DSP控制模块、及机器人驱动模块,以验证算法的有效性。
KUKA KRAGILUS工业机器人的实体控制测试:最终,项目工业机器人的实体控制。在LabVIEW建立的3D仿真
2023-12-21 20:03:18
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
深圳开鸿数字产业发展有限公司(以下简称”深开鸿“)OpenHarmony生态建设能力和在新兴行业领域的技术创新实力,也标志着OpenHarmony在新兴行业领域又向前迈进了一步。
夸父人形机器人由深开
2023-12-20 09:31:19
蓝芯科技正式发布全球首款「纯」3D视觉移动机器人VMR产品
基于领先的核心技术LX-MRDVS®(蓝芯-移动机器人深度视觉系统),围绕SMT贴片自动化生产,蓝芯科技正式发布全球首款「纯」3D视觉移动机器人VMR产品。
2023-12-18 11:29:42 513
513
513自动移液机器人, 全自动移液工作站
大大提高了工作效率,也极大地提升了实验精度。自动移液机器人是一种能够代替人工进行精确液体操作的自动化设备。它通过精密的机械结构和先进的控制系统,实现了对微小液体体积的准
2023-12-06 11:21:24
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递
2023-11-30 16:01:01
西门子1200PLC与海康机器人SC2000系列视觉传感器顺畅连接
在某车厂汽车生产线上,需要将西门子1200PLC与海康机器人SC2000系列视觉传感器,顺畅连接,工程师现场添加了Modbus TCP转Profinet网关,实现了PLC和视觉传感器之间的通讯
2023-11-07 11:20:38
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
2023-10-21 20:59:28
利用Arduino让机器人学会识别标识并作出行为
教你用Arduino让机器人学会识别标识并作出行为。你的人工智能小车从此有了眼睛!材料单:跟踪机器人底盘视觉传感器Arduino Uno电动机驱动板18650 Li-离子电池
2023-09-27 07:36:55
稳石机器人|日化行业智慧物流:打造高效绿色供应链
减少40%、效率提升60%、产品质检率99%、安全系数90%)
智能制造正在日化行业中迅猛发展,成为新一轮科技和产业革命的先导。作为日化发展的头部企业,正积极驾驭智能制造的浪潮,不断探索创新。稳石机器人
2023-09-21 13:45:14
【开源资料】使用ESP32C3超简单制作迷你四足机器人
用esp8266做过小四足机器人,这次用esp32C3重制了,主要的原因是C3有蓝牙可以用蓝牙遥控非常方便边,随时连接随时玩不占用手机WiFi。
而且esp32C3虽然管脚不多,但在8路舵机的控制
2023-09-21 11:15:37
ai人工智能机器人
的运营成本、人力成本还在不断提高(如:办公场地的租金、员工的工资、社保公积金、节假日福利等)。
如今的智能电话机器人,每天的电话拨打量可达800-1000通,相比人工提高了3-5倍,大大缩短了名单的筛选
2023-09-21 11:09:59
手部康复外骨骼机器人
迈步手部康复外骨骼机器人,机器人可以带动手指完成两种康复运动——双向弯曲运动和内收外展运动。机器人可适应不同患者的手指尺寸,外骨骼手的长度可调节,长时间佩戴不会使患者产生疲劳感。手部康复外骨骼机器人
2023-09-20 17:38:02
下肢外骨骼康复机器人
下肢外骨骼康复机器人BEAR-A1利用仿生学、人体工学、机器人技术,为下肢运动功能障碍者提供康复训练。通过对患者髋、膝关节提供助力完成康复训练,可以有效降低治疗师工作强度,提高康复训练效率,提高患者
2023-09-20 17:31:33
下肢外骨骼康复训练机器人
。 BEAR-H系列 外骨骼机器人是全球首款采用了柔性驱动器作为动力输出的外骨骼机器人。 BEAR-H1 拥有带动力的6关节(双侧髋、膝、踝),和髋
2023-09-20 17:25:48
基于DM642机器视觉系统的设计与实现
机器视觉自起步发展到现在,已有15年的发展历史。应该说机器视觉作为一种应用系统,其切E特点是随着工业自动化的发展而逐渐完善和发展的。
目前,国际上视觉系统的应用方兴未艾,1998年的市场规模为46亿
2023-09-20 07:58:22
基于Matlab和VR技术的移动机器人建模及仿真
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
2023-09-20 06:24:09
小安神童值班机器人
产品介绍小安值班机器人是集电力监控系统、动环辅控系统、巡检机器人“三合一"功能产品,在自学习算法和大数据的加持下,具备强大的AI能力,可实现配电室的数字化及无人值守。 特色功能全感知电力
2023-08-22 14:57:47
【IoT毕设】机智云平台+STM32+树莓派的草莓采摘机器人控制系统
本帖最后由 机智小编 于 2023-8-16 17:37 编辑
一、前言
本草莓采摘机器人控制系统是由江西理工大学机械工程专业的程鹏胜设计开发完成。针对某草莓种植基地模块化种植的高架草莓人工
2023-08-16 17:35:54
profinet转ethernet网关连接发那科机器人配置案例
机器人连接的远程I/O的IP地址即PROFINET转EtherNet网关ethernet端的IP地址;
10、添加一个链接;
11、设置好从站IP(本例为192.168.0.5)厂商ID为
2023-08-03 17:58:40
如何实现ABB机器人和视觉系统的TCP/IP通讯
随着工业现场需求的日益变化,机器视觉在机器人集成项目中的应用越来越广泛。在视觉与机器人的配合中,要解决的问题有很多,比如视觉的内外参标定,视觉系统和机器人间的标定问题,视觉和机器人间的通讯等等。
2023-07-14 11:01:314037
4037
AGV控制器:科聪叉式移动机器人控制器
FRC5000系列叉式移动机器人控制器,适用各类常见的叉式移动机器人,内置激光导航算法,支持单舵轮、双舵轮底盘运动模型。FRC5000系列自带丰富的I/O资源和各种通讯接口,支持CANopen
2023-07-11 10:26:45
AMR控制器:科聪AMR移动机器人控制器
MRC3100系列AMR移动机器人控制器,适用潜伏顶升式、协作(复合)式、辊筒式等差速底盘类型移动机器人,内置激光导航及二维码导航算法,支持差速底盘运动模型。MRC3100系列自带丰富的I/O资源
2023-07-11 10:12:02





电机配件柔性供料系统,机器人自动化上料工作站
柔性供料/震动盘是主要以小型电子产品为主,那么中大型其它产品就不能解决了吗?不是!我们针对柔性供料所研发的系统,它是可以适用于所有电子产品。柔性供料系统它包含CCD视觉、CCD视觉控制系统与机器人
2023-06-29 14:46:57
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
,移动机器人导航技术大致可分为以下几种:
01激光导航
激光导航分为激光反光板导航与激光自然导航两种方式:
1、激光自然导航
激光自然导航是一种无需使用反射板的自然导航方式,它不再需要通过辅助导航标志(二维码
2023-06-28 09:52:41
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
量,保证移动机器人按照规划路径顺利地到达目标位置。而开环控制则是根据预先设定的控制量进行运动控制,不考虑机器人当前状态的影响。开环控制相对简单,但精度较低,常用于一些简单的任务。
然而由于自主导航系统
2023-06-28 09:36:32
自编程机器人,售后难做吗?
自编程是如何完成的。
自编程其实也不是很高深的问题。
当用户给出参数时,有时也包括逻辑。
例如用户说,如果设备打开完毕,执行一个命令。
这个例子就包括了一个如果。你的智能机器人只需要生成一个
2023-06-08 16:20:45
如何快速地让机器人投入生产
不能完成的技巧性的工作。
所以机器人是一种模拟人手的技巧性设备。它的主要内容就是。
绕
转
穿
钳
拿
放
给
总之,它的主要内容就是研究人手的基本动作。
而研究人手的动作的主要内容就是研究一次动作的每
2023-06-06 16:18:33
利用Arduino Nano制作一个四足机器人遇到HC-05蓝牙模块问题,可以用ESP8266替换Arduino吗?
我在 Arduino Nano 的帮助下制作了一个四足机器人。但我经常遇到 HC-05 蓝牙模块的问题。所以现在我正在考虑用 ESP8266 替换 Arduino。谁能帮我这个?
2023-06-02 08:12:06
无法使用该数据来驱动我的机器人数据是怎么回事?
我正在开发一些 WSN 机器人,
我现在正在使用 2 个 ESP8266,一个充当 WSN 传感器节点,另一个充当机器人节点,
机器人在从其他 WSN 传感器节点获取数据时正在工作(现在亮起LED
2023-05-22 09:55:59
机器人如何计算简单的运动
模型要具备齿轮,导轨几种基本的运动原理。
要分辨基本图形,视觉模型要能分辨圆形,方形和三角形。
有了这两点,机器人就基本上能计算开模和注塑这种简单的工作了。要替代人类的工作,还要进一步学习。
2023-05-19 20:40:25
浅谈儿童陪护机器人
机器人的长期稳定运行。对于控制算法的实现,可以采用PID控制器或者模糊控制器,以达到更加精准的控制效果。
最常见的是TB67S249FTG芯片,它是一种适用于双极性步进电机的驱动芯片,采用了先进
2023-05-11 15:12:45
深圳泰科伺服机器人关节无刷直流伺服电机
定位, 且转动惯性小,动态响应快。主要应用包括自动化生产线,机器人关节,机器人关节、医医疗仪器及设备、精密仪器和工业控制系统,以及其他许多的应用。
2023-04-20 10:07:10
深圳泰科伺服RDM机器人无刷伺服电机驱动器
RDM协作机器人关节伺服驱动模块是一款基于FPGA 先进技术开发而成的高性能、直流供电、结构极其紧凑的全数字通用伺服驱动器,最大功率可达 1000W。通过EtherCAT/CANopen 总线控制
2023-04-19 15:39:40
深圳泰科智能RJU14机器人关节模组-体积小巧-结构紧凑
RJU系列关节模组——面向商业、生活服务类应用一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身
2023-04-19 15:23:14
深圳泰科智能机械臂RJS14机器人关节模组
泰科关节机器人具备哪些优势? 一、编程简单可以让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏
2023-04-19 15:13:28
广东机器人关节模组报价
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 15:03:00
深圳泰科智能RJSII系列机器人关节模组
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 14:54:26
泰科智能协作机器人机械手臂 小型桌面式机器人 模组机器人
深圳泰科智能TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作
2023-04-19 11:43:30
泰科智能TB6-R10六轴工业协作机器人 机械手臂 桌面式机器人 支持定制
深圳泰科智能TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作
2023-04-19 11:39:15
关节型机器人-深圳泰科智能机器人
负荷的需求。既有强大的通用性、 协作性与开放性,适用于物流装配、流水线生产、上下料、AGV、3C电子、科研、医疗等行业。TA6系列协作机器人安装简单(安装方式任意
2023-04-19 11:14:26
六轴关节型协作机器人
。既有强大的通用性、 协作性与开放性,适用于物流装配、流水线生产、上下料、AGV、3C电子、科研、医疗等行业。TA6系列协作机器人安装简单(安装方式任意角度)及用
2023-04-19 10:58:47
RJU系列机器人关节模组
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:53:03
广东机器人关节模组
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:48:11
广东机器人柔性旋转执行器
,让机器人开发更自由高精度绝对值编码器,精准控制运动轨迹,多圈绝对值编码器分辨率标配16单圈和16多圈,保障机器人定位更精准、运行轨迹的稳定性更好减少机器人开发过程
2023-04-19 10:40:37
深圳泰科智能关节机械手6轴TB6-R3协作机器人-结构紧凑-适合狭小工作空间
TB6-R3协作机器人是一款灵活的小型工业协作机器人,其精巧的机械结构设计,外形紧凑,能够适应狭小的工作空间,及高精密的工作任务需求;这款协作机器人自重仅为11.5KG,有效负载为3KG,工作半径达666mm,是轻型装配和高精度控制的理想选择。
2023-04-19 10:18:50
深圳泰科智能机械臂 TB6系列六轴桌面协作机器人
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-19 10:05:39
深圳泰科智能机械手臂 TB6-R10六轴协作机器人-防护等级高-合适恶劣工作环境
TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、航天、科研、教育等多个行业、多场景的自动化需求。
2023-04-19 09:38:36
深圳泰科智能TB6-R15机械手臂6轴工业协作机器人
TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作机器人功能强大、高自重负载比、高可靠性、模块化关节设计,易于末端扩展外部设备,可以实现快速安装部署。
2023-04-19 09:27:59
六自由度 人机协作机器人 工业机械臂
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。-
2023-04-19 09:22:29
深圳泰科智能TB6-R5机械手臂6轴关节型协作机器人
TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产应用需求。模块化
2023-04-19 09:16:32
深圳泰科智能RJU系列新型协作机器人关节模组-提供一体化解决方案
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 08:48:46
深圳泰科智能机器人关节无刷直流伺服电机
定位, 且转动惯性小,动态响应快。主要应用包括自动化生产线,机器人关节,机器人关节、医医疗仪器及设备、精密仪器和工业控制系统,以及其他许多的应用。
2023-04-18 17:35:19
深圳泰科智能RJS系列机器人关节模组
模组组成的最小机器人自重仅15kg。安装简单RJS关节模组简化了机器人的装配流程,装配过程不再有繁复的零件组装和走线,一台6轴机器人仅需要2-3小时便能快速完成。
2023-04-18 14:04:34
深圳泰科智能RDM机器人无刷伺服电机驱动器
RDM协作机器人关节伺服驱动模块是一款基于FPGA 先进技术开发而成的高性能、直流供电、结构极其紧凑的全数字通用伺服驱动器,最大功率可达 1000W。通过EtherCAT/CANopen
2023-04-17 18:13:06
深圳泰科智能机器人SHD系列旋转执行器
,让机器人开发更自由高精度绝对值编码器,精准控制运动轨迹,多圈绝对值编码器分辨率标配16单圈和16多圈,保障机器人定位更精准、运行轨迹的稳定性更好减少机器人开发过程
2023-04-17 18:01:33
深圳泰科智能TA6-R5机械手臂 6轴桌面式协作机器人
。既有强大的通用性、 协作性与开放性,适用于物流装配、流水线生产、上下料、AGV、3C电子、科研、医疗等行业。TA6系列协作机器人安装简单(安装方式任意角度)及用
2023-04-17 17:57:19
泰科智能机器人 TA6-R5协作机器人
。既有强大的通用性、 协作性与开放性,适用于物流装配、流水线生产、上下料、AGV、3C电子、科研、医疗等行业。TA6系列协作机器人安装简单(安装方式任意角度)及用
2023-04-17 17:49:50
泰科智能机器人RJU14机器人关节模组 一体化关节模块
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 17:40:55
上下料机器人 分拣机器人 焊接机器人 喷涂机器人 垛码机器人 推荐泰科智能机器人
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。
2023-04-17 16:36:37
机器人关节模组
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 16:25:29
六轴关节机械手臂-深圳泰科智能机器人
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 16:12:03
六轴抓取机械手-深圳泰科智能机器人
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:57:13
协作机器人-深圳泰科智能机器人
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3
2023-04-17 15:49:48
国产协作机器人-深圳泰科智能机器人
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3
2023-04-17 15:40:56
工业协作机器人-深圳泰科智能机器人
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:31:15
柔性关节机器人-深圳泰科智能机器人
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:25:07
桌面式协作机器人-深圳泰科智能机器人
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:15:06
深圳泰科智能RJSII系列机器人关节模组
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:07:26
广东机器人关节模组报价
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:02:00
扫地机器人是如何实现液位检测的
口上面,当机器人开始加水时,传感器会检测水位并将数据发送到一个微处理器。微处理器会根据清水箱的容量,来判断是否需要再次填充水。如果水位已满,机器人将停止加水。污水箱中也有水位传感器,但这个传感器测量
2023-04-15 11:21:46
如何实现拥有强悍功能智能巡检机器人
,越来越多的管道被铺设在地下,如此大面积的地下管廊该如何快速而精准的维护呢?考虑到地下管廊环境复杂并且具有一定的危险性,地下空间智能巡检机器人便应运而生,可以为地下管廊加装智能机器人巡检监测系统和处置系统
2023-04-12 15:49:23







 工商网监
工商网监
评论