本篇文章我们主要介绍正运动技术动态链接库环境配置以及EtherCAT运动控制器在ROS下的单轴运动。
2024-03-17 11:11:13 377
377 
本文以正运动技术EtherCAT运动控制器ZMC432和ZMC408CE为例,介绍正运动技术运动控制器在ROS上的应用开发。
2024-03-17 11:06:06452 
组成数控系统的关键部件——实时操作系统,是一系列关键技术中的关键。当前国产数控系统的方案几乎都采用国外的实时操作系统,一些是采用Windows+国外实时操作系统的方案,能够在一定程度上降低开发
2024-03-15 09:42:5864 
TMCM-1290是一款4-36V供电的智能集成步进电机驱动器+控制器模块,它融合了步进电机的运动控制和驱动功能,为现代工业应用提供了高效、可靠的解决方案。以下是关于TMCM-1290的详细介绍
2024-03-10 20:44:08
实时高性能需求尤其突出。面对以上挑战,合作伙伴翌控科技基于米尔STM32MP135开发板发布开放式高实时高性能PLC控制器解决方案,将高精准数据采集、预处理、存储、通信与高实时控制融为一体,为控制系统
2024-03-07 20:06:14
本文以正运动技术EtherCAT运动控制器ZMC432和ZMC408CE为例,介绍正运动技术运动控制器在ROS上的应用开发。
2024-03-06 11:47:51627 
数控编程中,G代码(也称为指令代码)是一种用于控制数控机床运动、辅助功能和工作过程的指令。在数控编程中,通过一系列的G代码指令的组合和排列,可以实现机床各种复杂的加工操作。本文将为您详细介绍数控编程
2024-02-14 15:51:00691 调用同一套API函数库,易与现有的工业控制系统集成,极大地提高了工程师进行二次开发的效率,加速设备的部署和应用。PCIE464产品硬件性能特点
(1)可选6-64轴运动控制,支持EtherCAT总线/脉冲
2024-01-24 09:48:21
加减速控制是CNC 系统的关键技术之一,也是实现数控系统高实时性的瓶颈。在CNC装置中,为了保证机床在启动或停止时不产生冲击、失步、超程或振荡,必须对进给电机的脉冲频率或电压进行加减速控制。
2024-01-19 15:02:35106 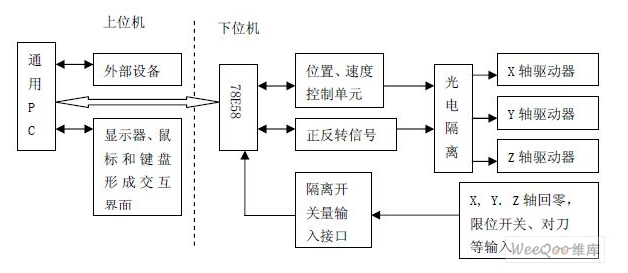
基于 PC 总线的控制器以DSP 作为处理器,以PC 机作为信息处理、人机交互和联网通信平台,运动控制器以插卡形式嵌入PC 机,即“PC+运动控制器”的模式。
2024-01-19 14:43:34122 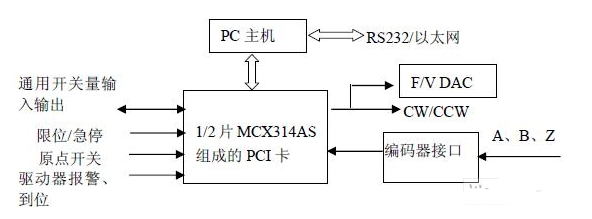
安川运动控制器具有高精度、快速响应和稳定可靠的优势,支持多种控制模式和传感器配合,提供实时监控和精确调整功能。北成新控以核心控制器为平台,为不同客户提供专用控制系统,助力企业数智化转型。
2024-01-11 11:00:05108 
SuperCAT是凌华科技打造的基于软件控制的EtherCAT运动控制器,其核心的控制软件来自于凌华二十多年运动控制经验的积累,整合了凌华脉冲卡和EtherCAT总线卡的所有功能,系统通讯周期相比硬件的EtherCAT总线卡得到了大幅提升,同时可以满足更多轴数的应用需求。
2024-01-09 11:57:44259 
PLC控制网关的功能特点 PLC控制网关是一种连接PLC (可编程逻辑控制器) 和网络的设备,用于实现远程监控、远程控制和数据传输等功能。PLC控制网关具有多种功能特点,下面将详细介绍其主要特点
2023-12-25 15:12:38247 环境中,对机器人进行了正逆运动学仿真测试。接着,对单轴和多轴伺服系统进行了控制测试,最终实现了机器人的轨迹规划实体控制。
在整个项目中,LabVIEW的功能被充分利用,特别是在算法实现、数据处理方面
2023-12-21 20:03:18
。利用EtherCAT技术的优异性能,可以实现用传统现场总线系统所无法实现的控制方法。
正运动技术的ZMC464运动控制器,实际测试过100us可以带16轴EtherCAT伺服运行,500us可以带
2023-12-13 11:37:40
西门子 840D 数控系统在制造企业中的应用较为广泛,该系统主要分为数控与驱动系统及人机界面两部分,系统的正常运行需要这两部分的协调配合。在实际生产过程中,该系统具备稳定
2023-12-07 10:49:42653 ;
③使能完成设置基本运动参数ATYPE、UNITS、SPEED、ACCEL、FWD_IN、REV_IN等轴参数,再发送运动指令便可驱动电机;4. 设置完成后即可建立通讯,通讯成功“控制器状态”-“槽
2023-12-05 09:29:57
新代数控系统维修注意事项
2023-11-23 16:27:07403 了解一下西门子840D数控系统故障维修与诊断方法
2023-11-23 10:46:361394 严格来讲,编码器只会告诉你改如何定位,要如何执行,是需要靠数控系统(或者PLC或运动控制器之类控制器)控制伺服或者步进电机来实现定位的,编码器好比人的眼睛,知道电机轴或者负载处于当前某个位置,工业
2023-11-13 08:07:17868 
请问我要测xy轴方向的运动用什么传感器 只测一个平面
2023-11-10 06:09:27
你们正点原子的mini四轴飞行器的控制器是多少位的
2023-11-08 07:40:08
、用户多任务程序。运动控制器支持多任务编程,各任务可以独立执行,任务间不受影响。通过划分任务,程序模块化,简化错误处理,提高系统灵活性和响应能力。这种方法在3C电子、印刷包装、机器人等领域的运动控制中具有
2023-11-07 09:52:36
今天,正运动小助手给大家分享一下全国产EtherCAT运动控制边缘控制器ZMC432H如何使用Python+QT实现连续轨迹加工。 01 功能简介 全国产EtherCAT运动控制边缘控制器
2023-11-06 16:03:52278 
镜运动控制器是正运动技术推出的高性能总线双振镜运动控制器,专为工业激光+振镜+运动控制方面的应用而设计,通过EtherCAT总线和脉冲轴接口能实现多轴运动控制。
ZMC408SCAN总线控制器支持
2023-11-06 10:30:40
手册及例程源码。以下为各个功能部分API指令一览表;1、控制器连接
2、控制器信息获取
3、基本轴参数设置
4、基本运动控制
5、VR寄存器
6、Table寄存器7、Modbus寄存器
8
2023-10-26 15:11:35
运动控制系统其实运动控制系统是一个比较大的系统,就像前面的通信系统一样,通常会由众多的组成部分构成。运动控制系统会综合信号分析与处理、自动控制、通信等的内容。运动的要素抽象来讲,运动的要素可概况
2023-10-25 08:07:52814 全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立式运动控制器,最多支持32轴运动控制,同时支持正运动远程HMI功能,能提供网络组态显示,可实时监控和调整参数配置。
2023-10-22 10:51:57459 
数控系统参数是数控机床的灵魂,数控机床软硬件功能的正常发挥是通过参数来设定的。机床的制造精度和维修后的精度恢复也需要通过参数来调整,所以数控机床没有参数等于是一堆废铁。数控机由于数控系统参数全部丢失
2023-10-21 09:27:18747 电子发烧友网站提供《16位单片机数控系统对普通车床进给系统进行改造设计方案.pdf》资料免费下载
2023-10-19 10:11:10 0
0 电子发烧友网站提供《基于数控系统单片机测控技术应用与实现.pdf》资料免费下载
2023-10-18 11:14:481 FANUC是当今世界上数控系统科研、设计、制造、销售实力最强大的企业,在规格系列上是当今世界上最完整的,并基于其强大的科研实力和严密步骤,努力不断开发高端商品,牢牢占据了国内中端数控机床市场的绝大多数的份额。
2023-10-17 10:18:001886 全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立式运动控制器,最多支持32轴运动控制,同时支持正运动远程HMI功能,能提供网络组态显示,可实时监控和调整参数配置。
2023-10-16 09:49:53422 
电子发烧友网站提供《基于ARMS和FPGA的嵌入式数控系统设计原理.pdf》资料免费下载
2023-10-10 09:33:472 点位运动控制:即仅对终点位置有要求,与运动的中间过程即运动轨迹无关。相应的运动控制器要求具有快速的定位速度,在运动的加速段和减速段,采用不同的加减速控制策略。
2023-10-09 17:10:10556 早期的运动控制技术主要是伴随着数控技术、机器人技术和工厂自动化技术的发展而发展的。早期的运动控制器实际上是可以独立运行的专用的控制器,往往无需另外的处理器和操作系统支持,可以独立完成运动控制功能、工艺技术要求的其他功能和人机交互功能。
2023-10-09 16:43:18252 
全国产EtherCAT运动控制边缘控制器的轴参数设置与单轴运动例程讲解。
2023-09-27 15:42:26353 
PCL6143运动控制器的原理及应用 可以用于设计开发相应的芯片电路。介绍了PCL6143 的功能结构、主要寄存器以及指令系统。设计了一款基于PC104总线的四轴运动控制卡, 介绍了如何编写运动控制卡的功能函数库。
2023-09-26 08:14:08
运动控制器就是控制电动机的运行方式的专用控制器:比如电动机在由行程开关控制交流接触器而实现电动机拖动物体向上运行达到指定位置后又向下运行,或者用时间继电器控制电动机正反转或转一会停一会再转一会再停。
2023-09-21 16:26:411760 
运动控制器是一种电子设备,通常与运动控制软件配合使用,用于控制机器人、数控机床和其他自动化设备移动或执行各种任务。运动控制器主要由一台计算机和相关的硬件组成,如数字信号处理器(DSP)和模拟/数字
2023-09-21 08:08:39470 应用中占据主导地位。PLC具有可编程性、灵活性、稳定性和可靠性等特点,适用于各种简单至中等复杂度的运动控制应用,如中小型制造和过程控制应用中。 专用控制器是针对特定应用设计的控制器。它们通常具有高度优化的算法和特性,以适应特定的控制任务。专用控制器在某些特定应
2023-09-19 09:58:30443 
自主设计 了一种双核四轴运动控制器 。该 运动控制器 以 MCX314As与 STM32为核心 硬件 。该控制 器不仅能够完成 四轴 的位置 、速度和 s曲线 的加减 速控 制等功能 ,还 能够
2023-09-19 08:08:55
集运动控制器、机器人控制系统和六轴伺服驱动于一体
⚫ 体积小、功率密度高、集成度高,适合20KG以下机器人 ⚫ 采用多自由度和非线性控制算法,实现高动态响应、高精度的电流、速度及位置控制⚫ 支持
2023-09-07 07:57:07
上节课程我们介绍了全国产EtherCAT运动控制边缘控制器ZMC432H的硬件接口与功能,本节课程我们主要讲解一下正运动API函数封装原理以及自定义API封装例程。
2023-08-28 15:08:19660 
在功能、性能上已经非常接近了。只是形式上它们大多数仍然保留了原有的特征,即:运动控制器主要面向运动控制系统,伺服轴(运动轴)是它的主要控制对象;PLC主要面向逻辑控
2023-08-08 08:09:46820 “现在 PLC 的运动控制功能越来越强了,圆弧插补、螺旋插补、电子凸轮都能轻松胜任了,那运动控制器和具备运动控制功能的 PLC 的差别在哪里,运动控制器以后的优势又在哪里?”
2023-08-06 09:30:011203 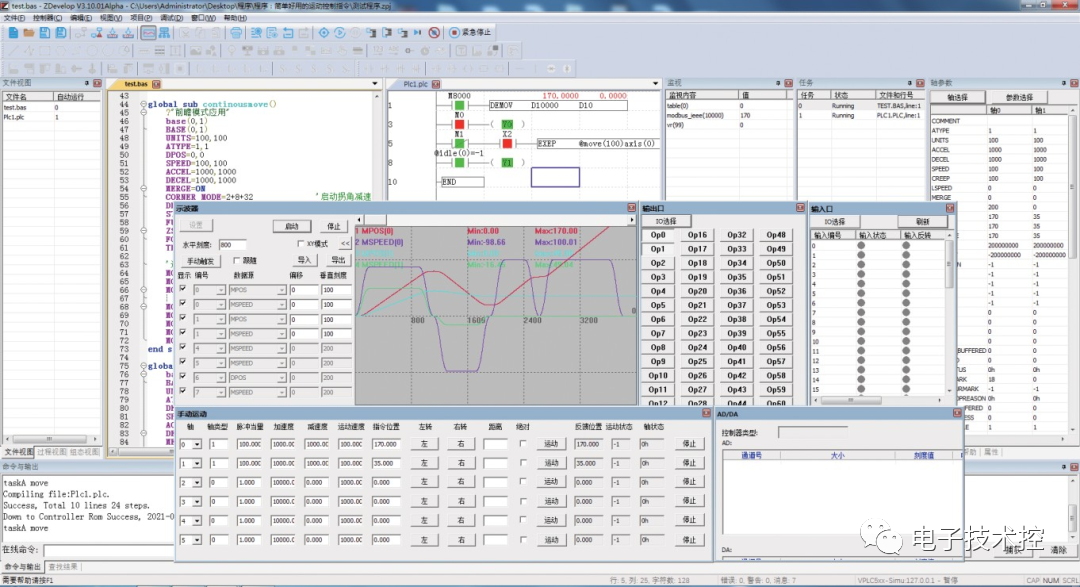
的发展,工业机器人应用越来越广泛,PLC也不再是简单的可编程逻辑控制器,各个品牌厂家都推出了自己的运动控制型PLC,来实现一些运动控制功能,与此同时,运动控制卡及运
2023-08-04 08:09:121072 运动控制器是一种电子设备,通常与运动控制软件配合使用,用于控制机器人、数控机床和其他自动化设备移动或执行各种任务。运动控制器主要由一台计算机和相关的硬件组成,如数字信号处理器(DSP)和模拟/数字
2023-07-31 17:42:41554 全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立式运动控制器,最多支持32轴运动控制,同时支持正运动远程显示功能,能提供网络组态显示,可实时监控和调整参数配置。
2023-07-29 09:15:24446 
定时器控制器提供单周期模式、周期模式、双态模式与连续计数模式,还提供由外部脚位来对事件计数功能,以及用来捕捉或重置定时器的输入捕捉功能。
2023-06-26 08:05:00
运动控制器的工作原理是将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置(点位、运动轨迹、插补等)控制、速度控制、加速度控制、转矩或力的控制。
2023-06-25 10:44:542153 
运动控制器是一种特殊的控制器,用于控制电机的运行模式:例如,电机通过冲击开关控制交流接触器,将电机拉到指定位置,然后下降或使用时间继电器控制电机的前后旋转,或先停一会儿,再停一会儿。运动控制在机器人和数控机床领域的应用比在专用机床中更复杂,因为后者的运动形式更简单,通常被称为通用运动控制。
2023-06-12 17:17:231383 典型的运动控制器卡和模块包括运动控制IC、微处理器以及用于处理高速编码器信号的DSP或定制ASIC。控制器向驱动器或放大器提供速度和旋转方向信号,进而提供适当的电压和电流(功率)水平来操作电机。要设计具有反馈的鲁棒且容错的运动控制系统,必须在设计期间在系统级别解决以下事项:
2023-06-12 14:51:11424 
(SCARA、Delta、6 关节)、电子半导体设备(检测类设备、装类设备、锁附类设备、焊锡机)、点胶设备、非标设备、印刷包装设备、纺织服装设备、舞台娱乐设备、医疗设备、流水线等应用场合。功能特点:最多 32 轴运动控制。脉冲输出模式:脉冲/方向或双脉冲或正交脉冲。支持编
2023-06-09 16:16:351 系列高性能多轴运动控制器可用于机器人(SCARA、Delta、6 关节)、电子半导体设备(检测类设备、组装类设备、锁附类设备、焊锡机)、点胶设备、非标设备、印刷包装设备、纺织服装设备、舞台娱乐设备、医疗设备、流水线等应用场合。产品功能:◆ 控制器本体支持 4 轴
2023-06-07 17:24:580 (SCARA、Delta、6 关节)、电子半导体设备(检测类设备、组装类设备、锁附类设备、焊锡机)、点胶设备、非标设备、印刷包装设备、纺织服装设备、舞台娱乐设备、医疗设备、流水线等应用场合。功能特点:◆ 最多达 16 轴运动控制。◆ 脉冲输出模式:脉冲/方向或双脉冲。◆ AXI
2023-06-05 17:38:060 (检测类设备、组装类设备、锁附类设备、焊锡机)、点胶设备、非标设备、印刷包装设备、纺织服装设备、医疗设备、流水线等应用场合。功能特点:控制器最多支持 16 轴运动控制。脉冲输出模式:脉冲/方向或双脉冲。支持编码器位置测量,可以配置为手轮输入模式。每轴最
2023-06-01 17:02:160 ZMC 是正运动技术推出的网络运动控制器型号简称。ZMC4 系列支持正运动 XPLC 的功能,可以通过网络来做组态显示。ZMC460N 高性能多轴运动控制器是一款兼容 EtherCAT 总线(其中
2023-06-01 16:37:520 管理
轴运动操作界面直接调试伺服、步进
虚拟控制器仿真,脱机开发
支持C#/C++......
动态链接函数库接口,弹性扩展
2023-06-01 09:39:23
正运动MOVESYNC指令实现多轴同步跟随功能。
2023-05-31 09:52:17661 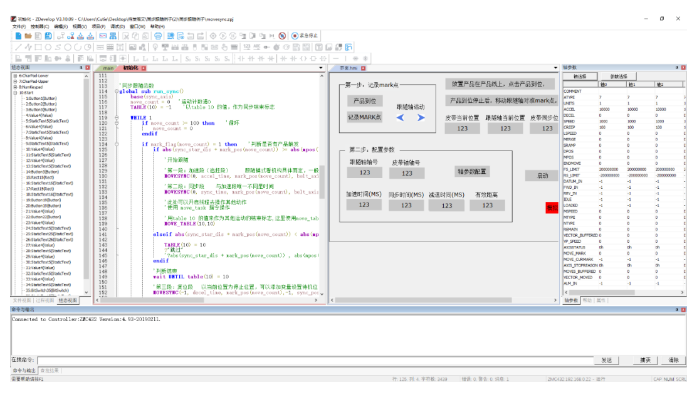
ZMC004WEA 经济型多轴运动控制器是一款兼容 EtherCAT 总线和脉冲型的独立式运动控制器。控制器本身支持 4 轴,最多可扩展至 6 轴,用以实现直线插补、圆狐插补、螺旋插补等简单的轨迹
2023-05-25 16:10:570 数控系统输入至进给驱动单元的除了速度控制信号外,还有伺服使能控制信号,一般为DC + 24 V继电器线圈电压。检查数控系统是否有速度控制信号输出; 检查使能信号是否接通。
2023-05-25 08:53:251268 数控系统的轴耦合功能,使展刀径向位移与轴向进给能够在金属切削加工时做到插补运算,满足外圆、圆弧、倒角等加工要求。与普通数控车床相比,应用展刀技术的车床具有加工效率和精度高,刚性好,机床结构紧凑,操作方便等特点。
2023-05-19 16:52:062670 
XPLC864E 经济型多轴运动控制器是一款集成了 Basic、PLC 梯形图和 HMI 组态三种编程方式于一体的运动控制产品。 XPLC864E 经济型多轴运动控制器是一款兼容 EtherCAT
2023-05-17 14:47:260 本文以正运动技术具备专用手轮接口的运动控制器ZMC408CE为例,介绍手轮、手轮的作用及原理、控制器手轮接口接线以及手轮程序配置。
2023-05-15 10:12:18843 
XPLC108E 经济型多轴运动控制器是一款集成了 Basic、PLC 梯形图和 HMI 组态三种编程方式于一体的运动控制产品。 XPLC108E 经济型多轴运动控制器是一款兼容 EtherCAT
2023-05-12 15:36:270 首先是运动控制器产品的复杂性。运动控制器可以分为PLC、专用控制器和PC-based运动控制器,PC-based运动控制器内部还分成三大细分种类。
2023-05-12 14:37:10240 
MotionRT7是正运动推出的跨平台运动控制实时内核,也是国内首家完全自主自研,自主可控的Windows运动控制实时软核。
1.MotionRT7具备以下特点(1)独立软件安装,适合各种
2023-05-12 09:59:45
相关参数的配置,EtherCAT总线初始化操作,以及初始化成功以后的运动控制。
一、XPLC006E功能简介
XPLC006E是正运动运动控制器推出的一款多轴经济型EtherCAT总线运动控制器
2023-05-11 09:49:04
ZMC408SCAN 激光振镜运动控制器是正运动技术推出的高性能总线双振镜运动控制器,专为工业激光+振镜+运动控制方面的应用而设计,通过 EtherCAT 总线和脉冲轴接口能实现多轴运动控制
2023-05-10 15:06:30
运动控制器就是控制电动机的运行方式专用控制器:比如电动机在由行程开关控制交流接触器而实现电动机拖动物体向上运行达到指定位置后又向下运行,或者用时间继电器控制电动机正反转或转一会停一会再转一会
2023-05-09 14:41:02707 实际上是形成运动的速度和位置的基准量。合适的基准量不但可以改善轨迹的精度,而且其影响作用还可以降低对转动系统以及机械传递元件的要求。通用运动控制器通常都提供基于对冲击、加速度和速度等这些可影响动态轨迹精度的量值加以限制的运动规划方法,用户可以直接调用相应的函数。
2023-05-09 14:39:50636 一个多轴运动控制系统由高阶的运动控制器(motioncontroller)与低阶的伺服驱动器(servodriver)所组成,运动控制器负责运动控制命令译码、各个位置控制轴彼此间的相对运动、加减
2023-05-09 10:56:39972 
mcu控制器是什么意思 MCU控制器是Microcontroller Unit的简称,中文名称为“单片机”,是一种集成了处理器、存储器、输入输出接口等多种功能模块于一体的小型计算机系统。MCU
2023-05-05 14:59:21
停一会再转一会再停。运动控制在机器人和数控机床的领域内的应用要比在专用机器中应用更复杂,因为后者运动形式更简单,通常被称为通用运动控制(GMC)。2、运动控制器的特
2023-04-25 11:22:211742 运动控制系统开发与应用 运动 是以 为控制对象,以控制器为核心,以电力电子、功率变换装置为执行机构,在控制理论指导下组成的电气传动控制系统。运动控制系统多种多样,但从基本结构上看,一个典型的现代运动
2023-04-21 18:04:19689 运动控制系统 其实运动控制系统是一个比较大的系统,就像前面的通信系统一样,通常会由众多的组成部分构成。运动控制系统会综合信号分析与处理、自动控制、通信等的内容。 运动的要素 抽象来讲,运动的要素
2023-04-21 18:02:141209 运动控制器就是控制电动机的运行方式专用控制器:比如电动机在由行程开关控制交流接触器而实现电动机拖动物体向上运行达到指定位置后又向下运行,或者用时间继电器控制电动机正反转或转一会停一会再转一会再停。
2023-04-21 10:14:31739 VPLC532E是正运动推出的一款EtherCAT视觉总线控制器,控制器集成了2个千兆以太网以及2个USB3.0、2个USB2.0接口,支持多种工业相机,支持多种视觉功能和复杂的运动控制功能。
2023-04-19 12:38:34376 的主要特点是体积小、构造简单、外部扩展能力强,控制功能比较强,简单,方便使用;而微控制器的硬件结构相对来说比较复杂,特点是性能高、能耗低、易于使用,比较适用于计算机系统中进行复杂的信息数据处理。 2
2023-04-13 15:11:27
ZMC 是正运动技术推出的网络运动控制器型号简称。
ZMC4 系列支持正运动 XPLC 的功能,可以通过网络来做组态显示。
ZMC432 高性能多轴运动控制器是一款兼容 EtherCAT 总线
2023-04-13 09:10:270 严格来讲,编码器只会告诉你改如何定位,要如何执行,是需要靠数控系统(或者PLC之类控制器)控制伺服或者步进电机来实现定位的,编码器好比人的眼睛,知道电机轴或者负载处于当前某个位置,工业上用的一般是光电类型编码器,下边简单说明一下。
2023-04-07 10:16:392021 ,否则运动命令无法下发给该驱动器;3.轴的类型根据ATYPE指令的表格填写正确类型,类型错误控制器会报错,导致无法运动;4.UNITS的值设置合理,脉冲下发速度太小导致电机动作微弱,肉眼无法分辨是否运动
2023-04-07 10:13:14
(或伺 服)电机运行的高可靠性高速数控系统,具有操作简便、抗干扰、性能稳定、功能强大、
经济实用 等特点,是各种步进(伺服)电机运动控制的高性能、低成本、简便易用的解决方案,同时可支持 数字量或开关量信号输入输出
(I/O)控制、2 路高速脉冲计数,用来控制电
2023-04-03 15:09:060 运动控制一直是以PLC、PC-based、专用控制器三分天下的形式各自发展,三者的市场份额也一直伴随着不同市场的应用发生着变化。
2023-03-25 09:11:12303 电机控制系统是指通过对电机的电流、电压、转速、位置等参数进行控制,调节电机运行状态的系统。它通常由硬件和软件两部分组成,包括电机驱动器、传感器、控制器、编码器等组件以及相应的控制算法。其主要功能是控制电机的运行、保护电机、实现各种运动模式和控制模式等。
2023-03-24 17:45:095639
 电子发烧友App
电子发烧友App



















 工商网监
工商网监
评论