深入解析SN65HVD23x:3.3-V CAN总线收发器的卓越之选 在电子工程领域,CAN(Controller Area Network)总线凭借其高可靠性、实时性和抗干扰能力,广泛应用于工业
2025-12-30 10:30:03 150
150 12月26日,在湖南省人力资源和社会保障厅、湖南省教育厅的指导下,由长沙市人力资源和社会保障局、湖南湘江新区民政和社会保障局主办,长沙市新一代信息技术公共实训基地、长沙职业技术学院、拓维信息、开鸿
2025-12-29 17:10:43962 
、实验室等关键环节的多维测评体系及自动驾驶安全验证全栈式解决方案,可为智能网联汽车全产业链提供专业、具备法定效力的检验检测服务。
2025-12-29 13:37:03301 
汽车级CAN总线收发器SN65HVDA1040A - Q1的深度解析与应用指南 引言 在汽车电子和工业控制等领域,CAN(Controller Area Network)总线凭借其高可靠性、实时性
2025-12-24 17:35:02467 探索TJA1057高速CAN收发器:汽车电子的理想之选 在汽车电子领域,高速CAN(Controller Area Network)收发器扮演着至关重要的角色,它是连接CAN协议控制器和物理CAN
2025-12-24 16:45:02172 随着智慧建筑与职业教育深度融合,楼宇实训设备已成为培养机电一体化、智能楼宇管理等专业人才的重要设备。然而,传统实训设备管理面临设备分散、故障响应滞后、运维管理缺失等痛点,导致使用效率低下、难以优化
2025-12-24 13:45:45162 
TCAN1042-Q1系列CAN收发器:汽车应用的理想之选 在汽车电子领域,CAN(Controller Area Network)总线作为一种重要的通信协议,广泛应用于各种电子系统中。TI
2025-12-19 15:50:31219 TCAN1051-Q1:汽车类 CAN 收发器的卓越之选 在汽车电子和工业控制领域,CAN(Controller Area Network)总线凭借其高可靠性、实时性和抗干扰能力,成为了数据通信
2025-12-19 14:20:02187 DS90UB924-Q1:汽车信息娱乐系统的数字视频音频解决方案 在汽车电子领域,对于数字视频和音频的高效分配有着持续的需求。DS90UB924-Q1作为一款具有双向控制通道的5MHz至96MHz
2025-12-19 13:50:02171 汽车CAN总线的“得力助手”:SN65HVD23x-Q1 3.3V CAN收发器 在汽车电子领域,CAN总线就像是汽车的神经系统,负责各个部件之间的信息传递。而SN65HVD233-Q1
2025-12-19 10:20:06254 SN65HVDA1040B-Q1:高性能汽车CAN总线收发器的卓越之选 在汽车电子领域,CAN(Controller Area Network)总线是连接各个电子控制单元(ECU)的关键通信方式
2025-12-18 09:25:02338 本次给大家带来了一个新东西:一个PCB板子。我们要做一个小实验分享给大家:CAN总线的解码,接下来会用到这块板子发出一个CAN信号进行解码本次实验会用到的一些设备:探头、PCB板、示波器演示过程首先
2025-12-17 17:34:16538 
TCAN1162x-Q1:汽车CAN FD系统基础芯片的卓越之选 在汽车电子领域,CAN FD(Controller Area Network with Flexible Data Rate)技术
2025-12-16 17:10:09435 探索TCAN1162x-Q1:汽车CAN FD系统基础芯片的卓越之选 在现代汽车电子系统中,CAN(Controller Area Network)总线作为一种可靠的通信协议,被广泛应用于各种电子
2025-12-16 17:10:05432 探秘TCAN1162-Q1:汽车CAN FD收发器的卓越之选 在汽车电子领域,高速、可靠的通信至关重要。CAN(Controller Area Network)总线作为汽车通信的骨干,其收发器的性能
2025-12-16 17:10:02442 TCAN1057AEV-Q1:汽车级CAN FD收发器的卓越之选 在汽车电子系统飞速发展的今天,高速、可靠且安全的通信需求日益增长。CAN(Controller Area Network)总线作为
2025-12-16 16:00:04216 在智能网联汽车技术快速迭代的当下,封闭测试场是其技术研发、模块验证与性能测评的核心设施。作为国内最早深耕智能网联汽车测试领域的企业之一,赛目科技运营的国家智能汽车与智慧交通(京冀)示范区顺义基地封闭测试场,凭借先进设施、创新测试模式与权威资质,成为车企及科技企业自动驾驶技术研发、落地的关键支撑。
2025-12-16 15:08:42391 在智能网联汽车技术快速迭代的当下,高可靠度、可复现、具备国际互认效力的测试验证体系,是产业安全落地与技术创新的基础保障。赛目科技智能网联汽车测试CNAS认可实验室,依托权威认可、系统化能力建设与双场地协同布局,可为行业提供专业、高效、完整的测试服务体系与全链条解决方案。
2025-12-16 15:05:36406 
探索TCAN1462-Q1:汽车级CAN FD收发器的卓越之选 在汽车电子领域,CAN FD收发器作为关键组件,对于实现高效、可靠的通信至关重要。TI推出的TCAN1462-Q1收发器,凭借其独特
2025-12-16 14:45:02213 TCAN1043N-Q1:汽车级CAN FD收发器的卓越之选 在汽车电子领域,CAN FD收发器作为关键组件,对于保障汽车电子系统的高效、稳定运行起着至关重要的作用。今天,我们就来深入探讨一下
2025-12-15 15:50:12404 在智能网联汽车时代,一辆现代汽车内部可能集成超过100个电子控制单元(ECU),从动力系统到自动驾驶,从车机娱乐到远程控制,这些模块通过车载网络(如CAN、以太网)实现数据交互。然而,这种高度互联
2025-12-15 15:26:39207 汽车CAN FD收发器的优选之选——TCAN843-Q1 在汽车电子领域,CAN(Controller Area Network)总线通信技术一直是核心的通信手段之一。随着汽车功能的不断增加和智能
2025-12-15 14:45:09235 TCAN6062-Q1:汽车类CAN XL收发器的卓越之选 在汽车电子领域,CAN(Controller Area Network)总线作为一种广泛应用的通信协议,对于实现车辆各系统之间的数据传输
2025-12-15 14:35:18218 TCAN1473-Q1:汽车CAN FD收发器的卓越之选 在汽车电子领域,CAN(Controller Area Network)总线作为一种可靠的通信方式,广泛应用于各种系统中。随着汽车
2025-12-15 14:35:15235 在汽车智能化与网联化加速发展的今天,车载以太网服务商推荐、车辆网络通讯测试方案等领域需求激增。虹科智能互联凭借十余年行业深耕,提供从底层总线到上层应用的完整解决方案,成为国内汽车总线做得比较好的厂商之一。
2025-12-11 13:22:19188 近日,武汉晴川学院机械与电气工程学院党总支书记张丽芳、实验室中心主任张帆带队莅临武汉森木磊石科技有限公司(简称“森木磊石”),开展以“创新实训平台建设”为核心的专项调研交流,并与我司就深化校企合作
2025-12-11 11:45:00580 
在安全教育数字化转型浪潮中,米禾数字凭借领先的技术实力与丰富的行业经验,为上海总工会职业学院安全实训基地打造了一套智能化、集成化展厅中控系统。系统通过数字多媒体技术与网络控制技术的深度融合,实现了
2025-12-03 17:07:40710 
在电子设备的设计中,CAN(Controller Area Network)总线作为一种广泛应用于汽车和工业控制网络的通信协议,其稳定性和可靠性至关重要。而ESD(静电放电)和其他有害浪涌事件可能会
2025-12-02 11:49:31361 
OBOO鸥柏:充电桩广告屏在高速服务区的多元应用在高速服务区,充电桩广告屏和触摸屏汽车信息查询系统正发挥着重要作用,而OBOO鸥柏(OBOO鸥柏)在这一领域表现出色。应用场景特点高速服务区人员流动
2025-11-26 15:20:12637 
虹科CAN总线系列直播圆满收官!HongKeWebinars作为汽车电子通信领域的核心协议,CAN总线技术正随着智能驾驶、车联网等趋势加速迭代。为帮助工程师深入掌握CAN总线技术,虹科推出了为期3
2025-11-24 17:55:032692 
10月31日,无锡市具身智能机器人工业数据采集与实训中心(以下简称“采训中心”)在无锡惠山高新区正式启用。采训中心的空间面积近7000平方米,由智能装备、锂电回收行业知名上市企业天奇自动化
2025-11-14 16:57:471533 保护汽车 CAN 总线系统免受 ESD 过压事件的影响CAN总线保护器件CAN bus ESD protection diode
2025-11-06 09:14:35
随着智能网联汽车技术快速发展,功能安全验证已成为行业关注焦点。ISO 26262标准要求通过故障注入测试验证系统安全机制的有效性,但传统台架或仿真测试难以真实反映实车工况表现。针对这一行业痛点,北汇
2025-11-04 14:34:351252 
10月16日-18日,世界智能网联汽车大会期间,东风汽车向行业公开验证演示两项车路云一体功能服务,相当于为车辆装上“千里眼”,可实时掌握前方路况,助你驾驶“一路绿灯”,加倍安全!
2025-10-30 17:33:47934 在智能制造人才培养体系中,PLC 实训设备作为实操教学核心载体,广泛应用于职业院校、技工院校及企业培训场景。当前设备售后运维管理中,企业普遍面临设备分散难管控、故障响应滞后、运维效率低下、数据应用不
2025-10-27 16:56:20380 
近日,以「汇智聚能·网联无限」为主题的2025世界智能网联汽车大会在北京隆重举行。会议期间,国际星闪联盟携手会员单位集中展示了星闪技术在智能网联汽车领域的一系列应用成果,并成功主办了《星闪短距通信技术的汽车数字钥匙蓝皮书》发布会。
2025-10-22 18:09:39978 10月16日,由工业和信息化部、交通运输部、北京市人民政府共同主办的2025世界智能网联汽车大会(英文简称WICV)在北京亦庄开幕。作为我国首个经国务院批准的国家级智能网联汽车专业会议,本届大会以
2025-10-22 16:48:44581 2025年10月16日至18日,第八届世界智能网联汽车大会(2025 WICV)于北京亦庄北人亦创国际会展中心举办。作为我国首个经国务院批准的国家级智能网联汽车专业会议,本届WICV大会以 “汇智聚能 网联无限” 为主题,汇聚全球产业力量,搭建起技术交流、成果展示与合作对接的高端平台。
2025-10-21 09:31:091723 10月16-18日,2025世界智能网联汽车大会在北京亦庄举办,本次大会以“汇智聚能 网联无限”为主题,举办多场智能网联专业会议及活动,长城汽车受邀参加本次大会,分享智能化领域的最新思考与实践。
2025-10-21 09:30:09535 2025年10月16日至18日,2025世界智能网联汽车大会(WICV)在北京亦庄北人亦创国际会展中心举办。作为我国首个经国务院批准的国家级智能网联汽车专业会议,本届大会以“汇智聚能 网联无限”为主题,汇聚全球政企和行业资源,促进跨行业协同发展。
2025-10-21 09:24:331761 2025年10月16日-18日,由工业和信息化部、交通运输部、北京市人民政府联合主办,以“汇智聚能 网联无限”为主题的2025世界智能网联汽车大会在北京亦庄北人亦创国际会展中心隆重召开。
2025-10-18 11:47:071125 10月16日,由工业和信息化部、交通运输部、北京市人民政府共同主办,以“汇智聚能 网联无限”为主题的2025世界智能网联汽车大会暨中国国际新能源和智能网联汽车展览会在北京亦庄开幕。作为首都汽车
2025-10-17 16:06:05602 10月16日,以“汇智聚能 网联无限”为主题的2025世界智能网联汽车大会在北京开幕,中国长安汽车集团有限公司党委书记、董事长朱华荣出席并发表题为“数智赋能,产业同驱,共谱智能网联汽车全球化发展新篇章”的演讲。
2025-10-17 14:08:22496 信息处理控制单元)是车辆联网的“神经中枢”,上接云端TSP平台,下连汽车CAN总线,实现数据双向交互5。作为车身唯一联网控制单元,其核心价值在于:
数据桥梁:采集车况、位置、驾驶行为等数据并上传云端
2025-10-11 10:06:28
此前,9月23至24日,第五届中国·沈阳智能网联汽车大会在沈阳智能网联大厦成功举办。大会以“智启新篇,网联未来”为主题,由沈阳市人民政府与中国汽车工程研究院股份有限公司共同主办,吸引了众多政府代表、院士专家、企业领袖及行业媒体齐聚一堂,共商智能网联汽车产业发展路径。
2025-10-09 15:11:51518 场景是智能网联汽车安全测试技术的基础,是开展安全测试评估的重要前提。为了确保智能网联汽车产品测试验证结果具备足够的覆盖度,需要构建基于场景的测试评估体系,对系统及其功能进行全面评估,从而系统、客观地反映车辆产品的安全状况。
2025-09-28 14:43:503446 
一体化ROS智能驾驶小车及实训教学平台解决方案
2025-09-26 17:34:061390 
近年来,国内汽车产业快速迈向智能化和网联化,“软件定义汽车”既成共识,周立功汽车软件ZXDoc的出现看似偶然,实则必然。ZLG致远电子:技术积淀与战略布局的必然成果公司从2010年启动汽车总线
2025-09-22 11:34:281040 
随着工业物联网(IIoT)、智能制造、汽车电子和智能交通的发展,CAN(Controller Area Network)总线因其高可靠性、实时性和抗干扰能力,已成为工业与汽车通信领域的主流标准
2025-09-12 09:23:01537 近日,摩尔线程携手科大讯飞等生态合作伙伴打造的AI教育实训基地在江苏省锡山高级中学(以下简称“省锡中”)正式启用。作为无锡市惠山区首个落地的AI教育实训基地,该基地自启动以来获得了惠山区政府的高度重视与大力支持。
2025-09-08 14:43:531282 智能汽车安全指南《一本书读懂智能驾驶安全》本文约12000字,建议收藏阅读近年来随着智能网联汽车的普及,智驾安全事故也不断频发,面对如此严峻的智能汽车安全形势,我们迫切需要一本专业的书籍,为我们剖析
2025-09-05 16:16:551864 
CAN总线简介 CAN总线是一种多主串行通信总线,最初为汽车电子设计,因其高可靠性、实时性和出色的抗干扰能力,非常适合环境复杂、安全性要求高的消防系统。它采用差分信号传输,仅需一对双绞线即可连接
2025-09-02 15:11:55979 
智能网联汽车产业加速发展,信息安全挑战日益严峻。经纬恒润提供全生命周期解决方案,涵盖MCU安全、软件代码管理和自动化测试,确保满足GB/R155/ISO等法规标准要求,助力企业实现合规防护。
2025-08-22 14:26:361698 
在汽车电子飞速发展的今天,车辆的智能化程度越来越高,CAN(Controller Area Network)总线作为汽车电子系统中至关重要的通信网络,连接着众多的电子控制单元(ECU),如同汽车的“神经系统”,负责信息的高效传输与交互。
2025-08-20 09:46:51731 
本方案以工业物联网(IIoT)技术为基础,构建覆盖设备层、边缘层、平台层和应用层的全栈式数据采集体系,旨在实现实训平台全要素数据透明化,支撑OEE分析、预测性维护、能耗优化等核心课程教学,培养具备产业实战能力的复合型智能制造人才。
2025-08-14 14:15:29488 CAN总线作为一种广泛应用的工业通信协议,其终端电阻的作用不容忽视。本文将详细探讨CAN总线终端电阻的重要性及其在通信中的关键作用。CAN总线终端电阻的重要性CAN总线终端电阻顾名思义就是夹在总线
2025-08-08 11:35:59902 随着智能网联汽车技术的飞速发展,车辆已经从传统的交通工具演变为高度智能化、网络化的移动终端。然而,这一变革也带来了前所未有的信息安全挑战。黑客可以通过各种手段入侵车辆系统,窃取敏感数据,甚至控制关键
2025-08-05 17:46:55762 在人工智能技术迭代提速的当下,高校教学正面临着技术落地与人才培养的双重挑战。作为高校教师,我们常常会遇到这样的困境:课本知识跟不上技术发展速度,实验室硬件难以支撑复杂项目实训,产教融合缺乏实际落地
2025-07-31 15:14:231827 
近日,“智联世界 嘉启新程”上海智能网联新能源汽车产业集聚区发布会活动在上海嘉定举行,嘉定区委书记肖文高、上海市经济信息化委副主任汤文侃共同为“上海智能网联新能源汽车产业集聚区”揭牌,标志着上海在抢占智能网联新能源汽车产业制高点、构建世界级汽车产业中心核心承载区上迈出关键一步。
2025-07-29 14:43:41735 、安全的核心!今天,我们就来揭开它的神秘面纱。CAN总线控制器是什么?如果把CAN总线比作一条高速公路,那么CAN控制器就是每个出入口的“智能交通管理系统”。它负责:
2025-07-25 11:35:13574 在职业教育改革和产业数字化转型的背景下,智慧实训室已成为职业院校提升实践教学质量和人才培养水平的关键载体。广凌科技(广凌股份)深耕教育信息化领域多年,推出的智慧多功能实训室建设方案,通过先进实训设备配置与物联网智能化管理,为职业院校打造了高效、安全、可持续的实践教学环境。
2025-07-25 09:59:37428 
在新能源汽车路试中,CAN总线传输异常是一个常见问题。本期我们将探讨由于总线电容过大导致的下降沿过缓问题,并介绍三种有效的解决方案。CAN总线下降沿过缓问题新能源路试工程师在分析CAN总线波形
2025-07-22 11:36:59565 和驾驶体验的革新,也使信息安全成为决定产业可持续发展的核心要素。面对日益复杂的安全威胁,构建一套覆盖全生命周期、融合技术与管理的安全防护体系已成为行业共识。 多维威胁下的安全治理体系 当前,智能网联汽车的“类手机化“特征使其面临前所未有的攻击面。据工信部
2025-07-16 18:13:26662 在人工智能技术迭代提速的当下,高校教学正面临着技术落地与人才培养的双重挑战。作为高校教师,我们常常会遇到这样的困境:课本知识跟不上技术发展速度,实验室硬件难以支撑复杂项目实训,产教融合缺乏实际落地
2025-06-27 13:45:001354 
随着汽车智能化、网联化、电动化的加速演进,信息安全已成为汽车行业亟需应对的严峻挑战。黑客攻击、数据泄露、远程控制失效等安全事件频发,推动汽车信息安全从“可选”升级为“必选”。作为保障车载系统安全
2025-06-26 18:20:362631 智能网联汽车技术的快速发展,在提升汽车智能化水平的同时,也对汽车信息安全提出了更高挑战。在此背景下,强制性国家标准《GB 44495-2024汽车整车信息安全技术要求》正式出台,已于2024年8月23日正式发布,将在2026年1月1日正式生效。
2025-06-17 15:48:58985 
近日,全国标准信息公共服务平台公示了关于征求《智能网联汽车组合驾驶辅助系统安全要求》拟立项强制性国家标准项目意见的通知,标志着我国在智能网联汽车领域的安全标准建设上迈出了重要一步。
2025-06-10 09:53:30823 CAN总线网络的性能在很大程度上取决于其信号质量。信号质量差可能导致通信错误,进而引发系统故障、效率降低甚至安全隐患。因此,评估和确保CAN总线信号质量是维护系统健康和可靠性的关键。
在CAN总线
2025-06-07 08:46:40
2025年2月,工业和信息化部、市场监管总局联合发布了《关于进一步加强智能网联汽车产品准入、召回及软件在线升级管理的通知》(以下简称《通知》),将汽车软件在线升级(OTA升级)纳入产品安全管理体系
2025-06-04 16:07:261318 御控工业网关作为教学实训系统的“数据枢纽”,通过协议转换、边缘计算、远程运维三大核心能力,为高校及职业院校打造了一体化、智能化的产教融合实训解决方案。
2025-05-28 08:41:00494 本方案旨在通过物联网网关技术与智能教学平台的深度融合,构建一套覆盖“感知层-传输层-平台层-应用层”的完整实训体系,助力院校培养具备实战能力的物联网复合型人才。
2025-05-21 09:32:23459 当前汽车产业正加速向电动化、智能化、网联化转型,电子电气架构复杂度呈现指数级攀升。面对车型快速迭代、多团队协同开发、数据安全管控等现代研发需求,以及混合多总线协议(CAN/CAN FD/J1939
2025-05-12 09:52:471538 
ZXDoc支持CAN总线仿真、面板仿真功能,通过虚拟化通信环境,提前验证、优化和保障系统可靠性,降低开发成本与风险,面板仿真还使其画面实物化,便于操作和理解,仿真功能已成为ECU研发和测试的关键环节
2025-05-09 11:30:391189 随着工业物联网(IIoT)、智能制造和自动驾驶技术的快速发展,CAN(Controller Area Network)总线已经成为工业控制、汽车电子和智能设备领域的重要通信协议之一。CAN总线模块
2025-04-11 10:36:301789 
智能网联汽车云控平台作为 “5G + 工业互联网” 在交通领域的重要应用,正展现出巨大的潜力和广阔的发展前景。它不仅为我们带来了更智能、更便捷、更安全的出行体验,也推动了汽车产业和交通行业的深刻变革。
2025-04-02 11:11:46770 
新高级副总裁蒋晟应邀出席并发表《数据驱动 合规护航——智驾数据处理方案加速智驾升级》主题演讲。同时,四维图新凭借在智能网联汽车数据合规闭环服务领域的突出成果,斩获 “2025年度优秀汽车信息安全产品提供商”奖项。
2025-03-28 17:01:40977 智能网联汽车"多场景安全并行"与"出口合规"两大行业痛点,助力车企抢占智能驾驶与全球化市场双赛道。行业趋势锚定:三大升级回应智能化浪潮1. 大容量存储:破解车联网
2025-03-27 14:08:52
近日,在达实智能成立30周年庆典上,达实AIoT智能物联网平台V7版本重磅发布。此版本借助国产AI大模型发展趋势,展示了生成式AI在园区数字化平台的实际应用。以下为发布会当天达实智能研发中心袁宜峰博士现场分享:
2025-03-21 11:44:52978 等方面的风险。密码技术是保障智能网联汽车安全性的关键技术,是智能网联汽车信息安全的基石,贯穿数据安全、通信安全、软件安全、自动驾驶安全和用户隐私保护等多个领域。国
2025-03-20 16:04:07831 
想必很多人都有这样的体会:今天的汽车,越来越像一款大号的、车轮上的“手机”,除了作为交通工具,也承担着越来越多信息消费和交互的职责。这种用户体验和认知上的变化,很大程度上是汽车信息娱乐系统技术演进的结果。
2025-03-20 11:07:401278 近日,“AI+物联网”开放实验室于达实智能大厦正式启动。开放实验室项目由深圳市科学技术协会、南山区科学技术协会作为指导单位;深圳达实智能股份有限公司为发起单位,首批有9家共建单位入驻。
2025-03-19 16:43:03937 近日,达实智能在公司总部发布了达实AIoT智能物联网管控平台V7版本,展示了生成式AI在园区数字化平台的实际应用。
2025-03-19 11:39:531016 ESD可能会发生在车辆安装和维修时CAN连接器的手动插拔,以及车辆在行驶过程中,电路噪声耦合到CAN总线等情况,具体取决于CAN总线在车辆内部的位置以及排布情况。测试标准主要参考ISO 10605
2025-03-14 11:18:425200 
CAN总线的应用不仅在工业领域,在汽车电子上的应用更是非常广泛。由于汽车的使用环境相对更复杂、更恶劣,这使得汽车CAN总线非常容易受到外界的干扰,严重时甚至会遭到破坏。所以如何设计一款高可靠性的汽车
2025-03-10 09:16:021630 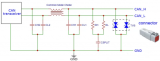
了顶层指引。广汽集团在《通知》发布的第一时间响应,将在《通知》的指引下,进一步构建全域智行安全守护体系,为用户带来好用、可靠、安全的智能网联汽车产品。
2025-03-03 17:25:111007 CAN总线的电路保护器件,通过二极管阵列的工作原理实现了对CAN总线的高效保护。它具有高速响应、低电流泄露、低电压降和高温工作的特点,适用于汽车和工业控制系统中的CAN总线保护
2025-03-03 13:26:55963 
国产高性能晶振兼容SiTime助力智能网联汽车关键技术
2025-02-20 10:26:17958 
在当今汽车电子系统日益复杂的背景下,汽车CAN总线协议作为车辆电子设备之间的数据传输主干,已成为汽车行业的标准通信协议。随着智能化、自动驾驶技术的迅猛发展,CAN总线在汽车中的作用愈加重要,它承载着
2025-02-11 16:36:18794 
智能网联汽车的时代背景与发展瓶颈 1.智能网联汽车的兴起 近年来,全球汽车工业正经历从传统机械化向智能化、网联化的深度变革。随着AI技术、大数据、物联网(IoT)以及5G通信的飞速发展,智能网联汽车
2025-01-19 10:14:041328 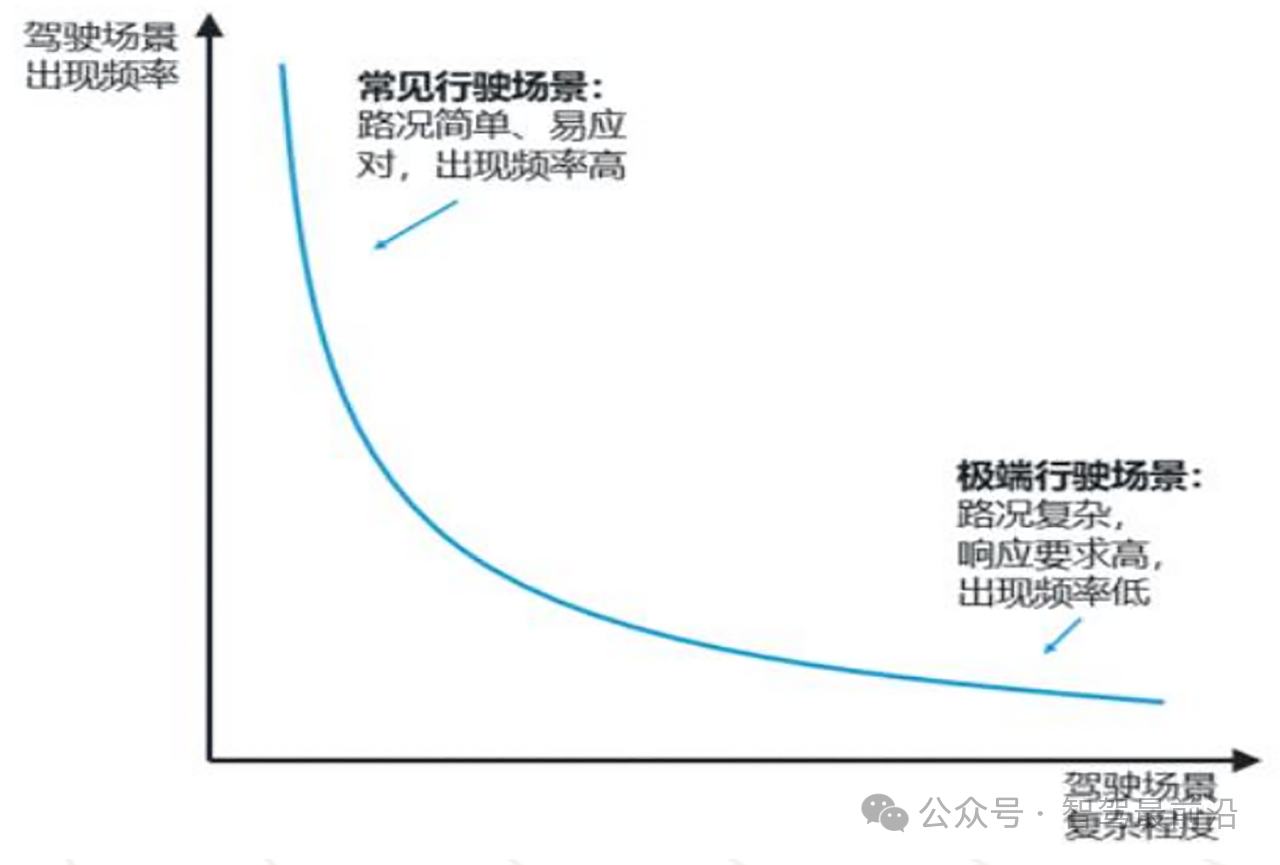
、车联网、OTA、功能安全、信息安全等核心技术对车内网络通信提出了更高的要求。目前主流的车载网络平台为多网段多总线类型的混合式架构,总线类型涉及CAN/LIN/CA
2025-01-15 15:40:05
随着自动驾驶和智能网联技术的快速发展,“智能网联”一词逐渐火热,不仅频繁出现在各类行业大会、政策文件中,还被许多职业院校迅速抓住,成为其开设新专业的招牌。这场看似顺应时代潮流的教育实验,却在实际操作
2025-01-13 15:30:412634 
近年来,科技革命与产业变革风起云涌,电动化、智能化、网联化已成汽车产业发展新潮。其中,智能网联汽车更是全球车企创新发力的关键。
2025-01-07 10:17:36741
 电子发烧友App
电子发烧友App












 工商网监
工商网监
评论