在嵌入式芯片AD采样的时候,需要根据基准电压确定采样值和显示值反映实际的数值关系;
1、基准电压是3V,2^12次方4096级采样,也就是0-3V对应0-4095,假设此时软件依旧按照3.3V的基准
2024-03-21 21:54:19
随着科技的日新月异,激光技术已成为现代工业领域不可或缺的重要力量,行业竞争更是愈演愈烈。在这波诡云谲的剧变中,大族激光作为行业的标杆,始终保持着稳健而坚定的前行步伐。凭借着卓越的技术底蕴和不断追求
2024-03-19 15:45:30 100
100 
基准电压源在电子领域中扮演着至关重要的角色,它为各种应用提供了稳定、可靠的电压。为了确保电路的准确性和可靠性,工程师需要关注和评估基准电压源的技术指标。衡量基准电压源的技术指标有很多,下面将详细介绍
2024-03-14 11:22:41108 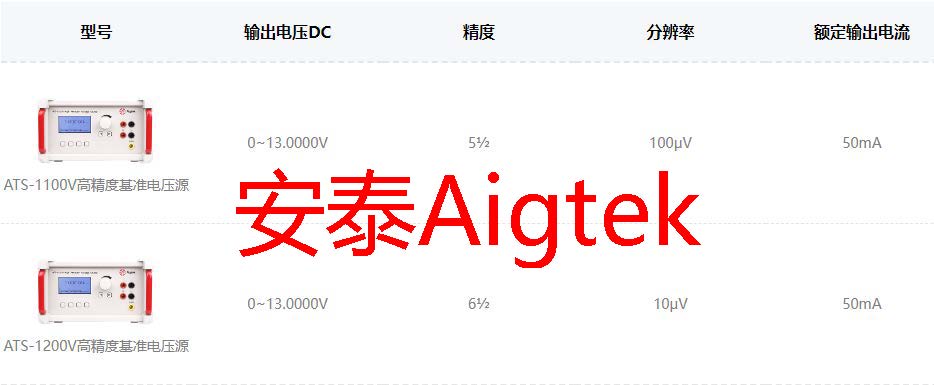
,MAC ( AURIX™ ) 从未报告有效的6EDL_SPI_LINK , [GETH_MAC_PHYIF_CONTROL_STATUS.B.LNKSTS] 始终保持为 0。
通过
2024-03-06 06:31:39
激光 SLAM 任务是搭载激光雷达的主体于运动中估计自身的位姿,同时建立周围的环境地图。而准确的定位需要精确的地图,精确的地图则来自于准确的定位,定位侧重自身位姿估计,建图侧重外部环境重建。
2024-03-04 11:25:0496 
的RTS线变为低电平,然后按下并释放RESET按键,再释放RECOVERY按键,就可以正常烧录固件。
但是我自己的电路板按下RECOVERY按键后,HCI UART的RTS线始终保持电平,造成固件无法烧录
2024-03-01 15:58:58
你知道激光钻孔技术有多牛吗?看完这篇文章你就明白了
2024-02-29 17:09:55168 自成立以来,高通技术公司在5G技术领域始终保持着领先优势。
2024-02-26 16:39:12224 LSD-SLAM 即 Large-Scale Direct SLAM,兼容单目相机和双目相机。LSD-SLAM是一种基于光流跟踪的直接法SLAM,但是实现了半稠密建图,建图规模大,可以在线实时运行。
2024-02-26 09:41:50267 
SLAM中,先验值通常从一系列传感器获得,比如惯性测量单元(IMU)和编码器,而观测值则是通过GPS、相机和激光雷达等其他传感器获取的,后验值是融合了先验信息与观测数据之后得到的结果,它代表了根据所有已知信息计算出的最优定位输出。
2024-02-23 11:31:03231 
CY8C6247BZID44内部基准电压可以设置吗?
2024-02-01 07:18:12
CY8C6247BZID44 CapSense基准线值如何转换pF?有大概的计算公试吗?
2024-02-01 06:13:19
基于NeRF的SLAM算法采用全局地图和图像重建损失函数,通过可微分渲染捕获稠密的光度信息,具有高保真度。
2024-01-26 10:48:31259 
推挽(push-pull)输出是由两个MOS或者三极管组成,两个管子始终保持一个导通,另一个截止的状态。
2024-01-25 15:07:20729 
是比较小的,这样的话两个三极管是始终保持导通放大的吗?那么这两个三极管的集电极输出电流是什么关系?当左边三极管集电极输出电流较大的时候,OC_OUT输出一个高电平,使右下角三端稳压器导通进而光耦导通,这样
2024-01-17 20:48:03
、GNSS RTK传感器组合和自主导航 SLAM 技术组成)、以计算机视觉为主的VSLAM技术、人工智能视频分析技术和网络传输、云平台管控相关技术。尤其是5G应用逐渐开始商用,将来智能巡检机器人借助5G
2024-01-14 21:56:23
进行激光晶圆漂移调整,从而能够以较低的成本提供出色的性能。AD688内置基本基准电压源和三个附加放大器。这些放大器经过激光调整,具有低失调和低漂移特性,并保持基准
2024-01-11 15:15:59
大多同时定位于建图(SLAM)系统在传统上假定的都是静态世界,这与现实世界的场景不符。
2024-01-05 13:46:49462 
近日,紫龙游戏旗下 BlackJack 工作室全新战棋旗舰作品《钢岚》在华为游戏中心首发上线,并宣布《钢岚》完成鸿蒙原生应用开发,成为基于 HarmonyOS NEXT 开发的首款战棋新游,不但
2023-12-28 10:24:08
跟踪场景表示。这里也推荐工坊推出的新课程《彻底剖析室内、室外激光SLAM关键算法和实战(cartographer+LOAM+LIO-SAM)》。
2023-12-26 16:38:33500 
松下激光投影机采用蓝色激光光源+荧光轮的技术架构,以避免三色激光在长时间使用后,R/G/B三种颜色的光源衰减程度不一致,导致均一性下降的问题,从而使得投影机在整个生命周期中均一性表现始终保持稳定。
2023-12-21 10:42:28357 请问现在Ad9265芯片已经工作(处于非SPI控制模式,DCO输出正常),但是不管怎么调节信号输入的大小,16位中的第7位输出始终为0,8,9,10,11位始终输出为1…这输出是不正常的……请问出现这种情况的原因可能是什么?请专家能给我提示。谢谢
2023-12-21 07:37:42
超快激光技术及其应用 超快激光技术是一种非常先进的光学技术,它利用超快激光脉冲进行高精度的物质分析和处理。超快激光技术具有时间分辨率非常高、能量密度非常大、能够实时观测分子和原子运动等特点,因此在
2023-12-20 15:35:55247 ADI工程师:
您好!今天在使用模数芯片AD7490时发现,DOUT引脚始终没有输出,供电电压5V,基准电压2.5V,我都量过,没有问题!
程序代码如下:
//IO操作函数
AD7490数据
2023-12-18 07:03:54
1.对AD5290写入数据后,发现W对A、B的阻值在变,但过一阵时间后W位置会回到A、B的中间,不管阻值是否发生改变,A、B、W输出电压始终保持1.36V不变,还有芯片断电后再重新接通电源W的位置又
2023-12-15 08:03:27
需要采集电流电压,所以需要一个基准源,选取ADR530,看了技术手册还是不太明白,它的具体用法?希望使用过的朋友给些建议。谢谢
2023-12-13 08:10:58
:目前使用矢量控制的方法来控制永磁同步电机,在速度开环的情况下,可以给较小电流,以旋变为位置传感器,实时跟踪电机的转角反馈,让电机以较慢的转速运行。故可以证明AD2S1210读取角度是没有问题
2023-12-12 08:01:16
在激光技术飞速发展的时代,大族光子凭借多年来在激光熔覆技术的高功率光源中的深耕,以及在增材制造熔覆行业的沉淀和积累,积极布局推出了熔覆专用的激光器及行业解决方案,为激光制造应用及科技进步贡献力量
2023-12-08 12:59:49194 
AD7794 内部增益8倍,外部电压基准的时候,数据输出很慢。这两项不能同时用么?试了一下,内部增益8倍,内部电压基准的时候正常。内部增益1倍,外部电压基准的时候也正常。
想确认下,是否选用外部
2023-12-08 06:12:41
德国SHF公司具有30多年射频器件的芯片设计、研发和生产经验,其微波器件性能始终保持着行业领先地位,多年来持续为市场提供超高带宽、相位匹配、便携易用的射频器件。
2023-12-06 09:36:44339 
高效的系统管理员通常是懒惰的。原因不是他们没有完成工作或浪费时间,主要是因为他们已经自动化了大量的日常任务。因此,不必在服务器上浪费太多精力,可以利用时间学习新技术并始终保持 “遥遥领先”。
2023-12-04 14:48:56197 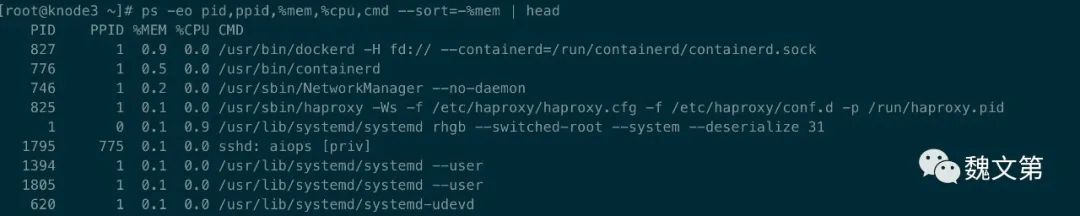
在AD2S1210数据手册中描述的基准电压源特性如下:
其输出电流较小,仅为100uA。
设计激磁电路时,使用了该参考源,但是没有注意到这个参数。激磁正和激磁负的实际处理电路仿真
2023-12-04 06:17:50
激光熔覆技术是一种金属表面处理技术,通过使用激光束熔化金属粉末并将其附着在金属基底上来制造复杂的金属零件或修复己损坏的金属部件。
2023-12-02 09:45:34601 9176没有输出。寄存器0x03A,位4始终保持为0。这意味着它没有同步。但204B链路已经成功(sync等于1,FPGA已经传输了数据)。
任何人都可以帮助我 我会非常感激的!
2023-12-01 07:33:49
什么是激光雷达3DSLAM?在了解这个概念之前,我们首先需要弄懂什么是“SLAM”。SLAM,英文是SimultaneousLocalizationandMapping,意思是即时定位与建图。通俗
2023-11-25 08:23:57998 
西门子工控机是为了适应特殊、恶劣环境下工作的一种工业计算机,它的电源、机箱、主板都是为了能适应长时间不间断运行而设计的。但是也并不是说工控机适合长期在高温、高尘、高湿环境下运行,那么高温环境下,工控机该如何防护?本文将为您介绍一些常见的日常维护事项,帮助您让它始终保持良好的工作性能。
2023-11-23 11:03:36239 中强光智能自主研发的3D激光SLAM无人叉车KSRB1425由智能3D激光导航出发,结合视觉及多项感知融合技术,搭配先进的演算能力,实现智能化精准运动
2023-11-10 15:59:17418 。
根深叶茂,OpenHarmony四大技术架构竞争力领先,生态蓬勃发展
OpenHarmony以“面向万物智联世界,构建分布式全场景协同的开源操作系统基座与生态系统”为技术愿景,秉持“生态统一
2023-11-06 14:35:46
激光清洗技术是激光技术在工程领域的一种成功应用,其基本原理是利用激光能量密度高的特点,使激光与工件基底上附着的污染物相互作用,以瞬间受热膨胀、熔化、气体挥发等形式与工件基底分离。激光清洗技术具有高效
2023-10-29 08:07:49883 
将始终保持稳定状态。具体来说,当输入信号移动到同相端和反相端之间时,反馈回路的电压会减小或增大,从而调整输出电压来消除任何输入电压的影响。这就是所谓的负反馈,它可以使运算放大器更加稳定,减少噪声和失真。 为什么
2023-10-26 15:57:341736 激光SLAM局部定位精度高但全局定位能力差且对环境特征不敏感,而视觉SLAM全局定位能力好但局部定位相对激光雷达较差,两者融合可以提高SLAM系统的精度和鲁棒性。
2023-10-23 11:01:14646 
如何减小cmos带隙基准温度系数工艺角的影响? CMOS(Complementary Metal Oxide Semiconductor)技术是现代电子工业中最常用的技术之一,它具有功耗小、集成度
2023-10-23 10:29:11318 激光是20世纪以来,继原子能、计算机、半导体之后,人类的又一重大发明,被称为“最快的刀”、“最准的尺”、“最亮的光”和“奇异的激光”激光技术和激光器是二十世纪六十年代出现的最重大的科学技术之一。由于
2023-10-10 10:02:07217 
STM8的ADC采样可以用内部的电压基准吗
2023-10-10 06:44:26
STM8的低功耗模式下可以保持PWM输出吗
2023-10-09 07:39:49
共焦显微镜系统所展现的放大图像细节要高于常规的光学显微镜。VT6000共聚焦激光显微镜技术以共聚焦技术为原理、结合精密Z向扫描模块、3D 建模算法等对器件表面进行非接触式扫描并建立表面3D图像,在
2023-09-28 09:19:04
中图仪器SJ6000高精度激光干涉测量技术具有高精度、高灵敏度、非接触式测量等优点,采用激光双纵模热稳频技术,可实现高精度、抗扰力强、长期稳定性好的激光频率输出。结合不同的光学镜组,可实现线性测长
2023-09-27 11:45:06
SLAM(Simultaneous Localization and Mapping)同步定位与地图构建,一种同时实现设备自身定位和环境地图构建的技术。
2023-09-20 10:59:591059 
激光雷达被认为是L3 级及以上自动驾驶必备传感器
当前 L2 级自动驾驶感知系统主要由超声波雷达、毫米波雷达、摄像头等车载传感器组成。特斯拉环绕车身共配有8个摄像头,视野范围达360度,对周围环境
2023-09-19 13:35:01
介绍了一种以小型PLC为控制核心的大功率半导体激光治疗仪。该治疗仪采用单管激光器光纤耦合技术设计了波长为808rim、输出功率30W 的激光器模块,采用恒流充电技术设计了高效激光器驱动电路,整机具有散热好、低功耗和高可靠性等优点。
2023-09-19 08:23:52
设计了半导体激光器恒定功率驱动电路,采用负反馈运算放大电路构成恒流源,电容充放电模块构成稳压环节,以高精度电流检测芯片 MAX4008监测 PIN光电探测器探测电流,以此为基准,引入功率反馈环节,稳定输出功率。阐述并分析了电路原理与实验结果,表明电路运行稳定,实现了精确的自动功率控制。
2023-09-19 07:15:15
GO-SLAM主要还是基于NeRF进行稠密重建,可以发现相较于NICE-SLAM这些SOTA方案,GO-SLAM重建场景的全局一致性更好,这主要是因为它引入了回环和全局BA来优化累计误差。
2023-09-11 10:03:29681 
中图仪器SJ6000激光干涉测量技术具有测量精度高、量程大、速度快、灵敏度高、抗扰力强等优点。在计量领域中可作为长度基准以及设备校准工具。它结合不同的光学镜组,可实现线性测长、角度、直线度、垂直度
2023-09-05 10:45:27
近年来,SLAM技术取得了惊人的发展,领先一步的激光SLAM已成熟的应用于各大场景中,视觉SLAM虽在落地应用上不及激光SLAM,但也是目前研究的一大热点,今天我们就来详细聊聊视觉SLAM的那些事儿。
2023-09-05 09:31:111374 
激光熔覆技术是一种经济效益很高的新技术,它可以在廉价金属基材上制备出高性能的合金表面而不影响基体的性质,降低成本,节约贵重稀有金属材料,因此,世界上各工业先进国家对激光熔覆技术的研究及应用都非常重视
2023-09-04 16:09:52393 电压表的结构使其内阻始终保持高。如果它与电路串联,则由于测量电压而流过的电流最小化。因此,干扰电压表的读数。
电压表始终与电路并联连接,以便电路上出现相同的压降。电压表的高电阻与其所连接
2023-09-01 16:39:07
激光slam中,LOAM(Lidar Odometry and Mapping in Real-time)系列具有举足轻重的地位。下面的表格是近年来LOAM系列算法的汇总。
2023-08-31 15:54:21355 
芯片,已经成为企业在5G领域中主导地位的重要原因之一。 华为5G芯片的研发历程 华为在5G芯片的研发方面始终保持了领先的态势。自2013年起,华为5G芯片的研发计划就已经开始,系统性推进了5G芯片的技术突破和产业生态的构建。经过多年的技术积累和不
2023-08-31 09:40:294102 在实验中,hdl_graph_slam和BLAM在所有数据集上的性能均不理想,因而下面不再讨论。而SC-LeGo-LOAM的性能较之LeGo-LOAM也没有明显改善,因而下面也不再讨论。
2023-08-28 11:47:39366 
3D激光SLAM中所用的一般是多线激光雷达,每一个数据帧中的点云数量非常的多。像KITTI数据集中所用的Velodyne 16线激光雷达,一般点云数在几万。而Velodyne 64线激光雷达点云数量更是多达十几万。这个数量太过庞大,如果每一个点都参与运算,那么对计算资源的需求将是不能接受的。
2023-08-28 10:12:50477 
激光跟踪仪是一种常用于工业领域的高精度测量工具,其测量精度由基准面的选择直接影响。因此,在进行尺寸测量时,选择合适的基准面是非常关键的。激光跟踪仪选择基准面的要求1、基准面应该尽可能平整,不得
2023-08-23 17:29:10584 
上周的组会上,我给研一的萌新们讲解什么是SLAM,为了能让他们在没有任何基础的情况下大致听懂,PPT只能多图少字没公式,这里我就把上周的组会汇报总结一下。 这次汇报的题目我定为“视觉SLAM:一直在
2023-08-21 10:02:071568 
激光雷达是最古老,研究也最多的SLAM传感器。它们提供机器人本体与周围环境障碍物间的距离信息。常见的激光雷达,例如SICK、Velodyne还有我们国产的rplidar等,都可以拿来做SLAM。激光雷达能以很高精度测出机器人周围障碍点的角度和距离,从而很方便地实现SLAM、避障等功能。
2023-08-16 10:31:081895 
(CHIRI)中界定的能力。Armv8-A结构配置将能力引入Armv8-A 系统原型开发平台,作为Armv8 AArch64 State(S)的扩展版SDP原型开发平台。 CHIR-S指令配置原则为精细调
2023-08-12 07:25:49
SLAM至今已历经三十多年的研究,这里给出经典视觉SLAM框架,这个框架本身及其包含的算法已经基本定型,并且已经在许多视觉程序库和机器人程序库中提供。
2023-08-10 14:15:53410 
锂电池的生产迭代已经给激光设备带来了明确的“增量”机会,能够抓住技术领先的时间窗口,以激光创新工艺技术与现有所需设备进行耦合,将形成锂电智能装备企业新的价值来源。
2023-08-09 10:17:27818 
正如图中所示,机器人自主定位导航技术中包括:定位和地图创建(SLAM)与路径规划和运动控制两个部分,而SLAM本身只是完成机器人的定位和地图创建,二者有所区别。
2023-08-03 11:12:00697 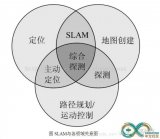
融合。 作为AR和计算机视觉领域的领先企业,谷东科技受邀参与本次技术了论坛,与业内专家和学者进行深入的交流和探讨,共同探索SLAM技术在现实世界中的发展和应用前景。我们分享了在SLAM技术方面的最新成果和经验,包括基于深度学习的实时地图构
2023-08-01 09:37:23525 电子设备必须能够将真实世界的测量结果(速度、压力、长度、温度)映射到电子世界中的可测的量(电压)。当然,要测量电压,您需要一个衡量标准,该标准就是基准电压。对系统设计人员而言,问题不在于是否需要基准
2023-07-17 11:40:001247 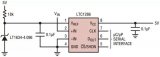
所谓AGV,是Automated Guided Vehicle的缩写,意即"自动导引运输车"。
2023-07-11 09:36:42783 激光器、半导体激光器、光纤激光器、碟片激光器等多种品类,每种激光器都在自身技术、性能方面不断发展创新,在能量、光束质量和稳定性等方面,始终在向着更高的台阶迈进。在继
2023-07-07 12:00:10581 对于学术研究而言,LeGo-LOAM是激光SLAM的经典框架,LeGo-LOAM源码简洁清晰,比LOAM算法的代码可读性要高很多。近几年各顶会上的很多SLAM算法设计思想都潜移默化地受LeGo-LOAM的影响,对其的改进思路相较于LOAM也比较多样化。
2023-07-03 10:47:08415 
激光SLAM很多人都觉得很难,对于初学者更是不知道从哪里开始学起,怎样才能更高效的学习,进入相关企业需要达到什么样的要求,这也是很多初学者面临的难题。如果掌握了3D激光SLAM的核心技术原理,编程
2023-06-29 15:28:55337 
激光slam中,LOAM(Lidar Odometry and Mapping in Real-time)系列具有举足轻重的地位。
2023-06-28 09:25:15387 
调整,从而能够提供出色的性能。AD588内置基本基准电压源和三个附加放大器,可提供引脚可编程的输出范围。这些放大器经过激光调整,具有低失调和低漂移特性,以保持基准
2023-06-27 09:19:02
激光晶圆漂移调整,从而能够以较低的成本提供出色的性能。AD688内置基本基准电压源和三个附加放大器。这些放大器经过激光调整,具有低失调和低漂移特性,并保持基准电压
2023-06-26 17:49:25
法雷奥始终恪守承诺,受到全球客户的认可。2023年5月,法雷奥宣布其最新一代激光雷达SCALA 3在过去18个月的订单价值超过10亿欧元。法雷奥作为高级驾驶辅助系统(ADAS)领域的全球领导者,是第一家对L3级自动驾驶系统的激光雷达和感知软件实现量产的企业,目前仍然保持领先地位。
2023-06-25 15:03:13644 
激光熔覆是一种表面改性技术,又称激光熔覆或激光熔覆,以高能激光为热源,合金粉末为焊接材料,通过激光与合金粉末同步作用于金属表面,迅速熔化形成熔池,然后迅速凝固形成致密、均匀、厚度可控的冶金结合
2023-06-19 13:59:42317 
与ORB-SLAM2相比,ORB-SLAM3在处理大视差和长时间未观测到的场景时效果更好。它还提供了更准确的帧间运动估计和更快的处理速度。
2023-06-19 09:28:121961 
电子发烧友网站提供《使用Bittle和Raspberry Pi 4的ROS SLAM.zip》资料免费下载
2023-06-14 15:23:22 0
0 二十余年来,同时定位与建图(Simultaneous LocalizationAnd Mapping,SLAM)在移动机器人技术社区中一直是一个非常受欢迎
的话题。SLAM有很多应用,例如空间探索
2023-06-02 14:25:222 我的 ISP 需要登录 ID 和密码才能访问互联网。该网页应始终保持打开状态,否则它会提示我再次登录,这在移动设备上使用时真的很痛苦,因为它一直在注销。我正在考虑用 ESP8266-7
2023-05-24 07:49:27
很多同学都觉得Slam方向难以入门,也难以学深。但其实相对来讲,不像其他很多方向,很多的东西大家都已经做了,并且做的很不错,要想发论文或者找创意突破比较吃力。slam方向还有很多深层次的多领域结合应用的内容还比较少,并且slam更深的内容还有很多东西需要做。
2023-05-09 14:25:14638 
中国最大测绘地信展会,其域创新重新定义手持激光雷达、手持SLAM设备。
2023-04-27 12:26:50927 
的模拟信号,因此必须使用高性能ADC和DAC。在恶劣的数字环境内,能否保持宽动态范围和低噪声与采用良好的高速电路设计技术密切相关。包括适当的信号布线,去耦和接地。 过去,一般认为“高精度,低速”电路
2023-04-19 16:31:04
电阻值为576Ω时,基准电压源将在4.16V至12.75V的输入电压范围内保持在其工作区域内。压差为64mV,具有超过12V的完整基准功能。为了比较并联基准低压差与具有相同4.096V基准电压的串联基准电压,数据手册中规定REF5040的最大压差为200mV。
2023-04-11 09:22:22856 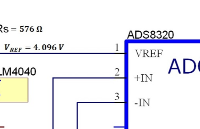
μA。 如果外部电阻的值为576Ω,则基准电压源在4.16V~12.75V输入电压范围内保持在工作区域内。 这是64mV压差,在高于12V的电压下可完美用作基准电压源。 为了将并联基准电压源的低压
2023-04-10 10:50:311097 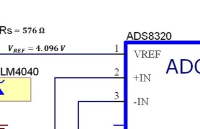
我有一个连接到外围设备的使能引脚,我想在正常模式和挂起模式下保持高电平($systemctl suspend)。 在 DTS 中:IMX8QM_LVDS0_GPIO01_LSIO_GPIO1_IO05 0x00000061您知道如何配置此引脚以在挂起模式下保持其值吗?
2023-04-03 07:16:01
继电器是一种电控制器件,可以给予规定输入量并保持足够长的时间,在电气输出电路中使被控量发生预定的阶跃变化。当输入量降至一定程度并保持足够长的时间后,再恢复到初始状态。下面介绍激光焊接技术在焊接继电器的应用优点。
2023-03-29 13:27:27376 一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM算法有:gmapping, hector, karto, cartographer。通常数据和运动都限制在2D平面内且运动平面与激光扫描平面平行。
2023-03-27 11:06:561384 激光雷达分单线和多线这两大类,针对这两类Lidar所使用的算法也不尽相同。 首先单线雷达一般应用在平面运动场景,多线雷达则可以应用于三维运动场景。
2023-03-27 11:02:181901 (Localization),建图(Mapping)和路径规划(Navigation)。由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。目前,SLAM技术被广泛运用于机器人、无人机、无人驾驶、AR、VR等领域。
2023-03-24 11:10:52843
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论