机器人元器件 机器人套件
2024-03-14 22:03:38
机器人元器件 机器人套件
2024-03-14 21:13:23
机器人元器件 机器人套件
2024-03-14 20:37:45
/Explore_using_a_customized_Arduino_Nano_based_board_to_wirelessly_control_up_to_078e9d15.html
步骤2:机器狗3D部件组装
总共有4条腿,所以你需要打印4套腿部件。部件非常容易组装
2024-03-14 14:52:20
特征可以完成更多任务。在落地应用中安防智能机器人有两大技术难点,一是如何保证 SLAM 技术在动态导航中的稳定性和准确性;二是如何保证在光照强弱不一、恶劣天气情况,以及多移动目标等复杂场景下,机器智能
2024-01-14 21:56:23
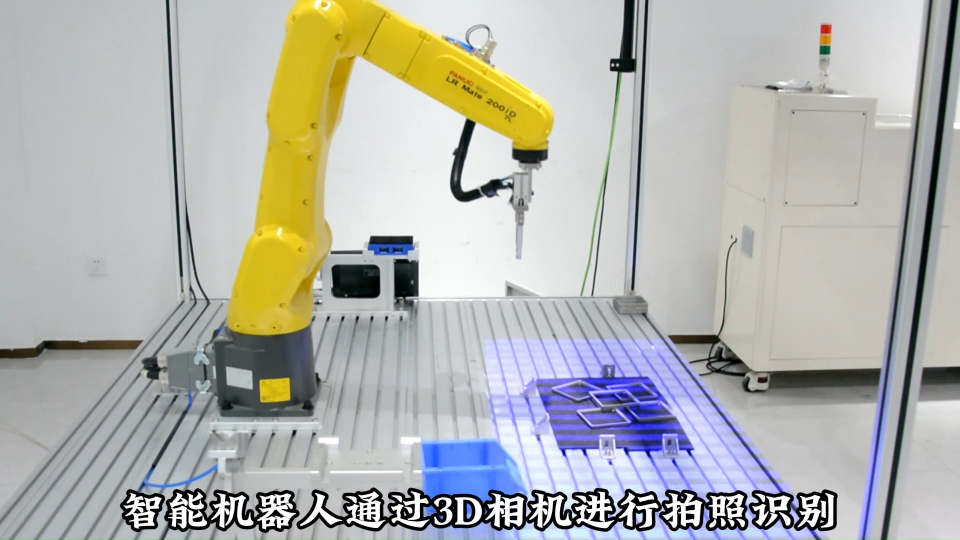
产品特点1、适合于大幅面空间焊接,机器人智能化操作,灵活可靠,可以六轴联动,可任意空间焊接,不局限于平面焊接;2、可以根据生产需求而定制夹具;3、实现双工位或多工位焊接操作,节省产品安装夹具时间
2024-01-04 13:57:58
中图仪器Novator系列影像仪激光扫描3d成像采用大理石主体机台和精密伺服控制系统,将传统影像测量与激光测量扫描技术相结合:可支持搭载高精度线扫激光测头,无接触扫描3D轮廓成像,抑制多重反射,能够
2023-12-27 09:22:57
置于底座上,并为电源线的自由移动预留了充足的空间。为了提高机器人运动的稳定性,我们还特意使车身与底座轻微接触。
另外,我们特意选择蓝白配色方案,因为蓝白组合能提升机器人的视觉吸引力。
3D 打印
我们
2023-12-26 15:18:26
;gt;>点此查看全文
3.全志XR806基于FreeRTOS下部署竞技机器人先进模糊控制器
前言
很荣幸参与到由全志在线举办的XR806开发板试用活动。本人热衷于各种的开发板的开发,同时
2023-12-26 09:17:46
将系统分为算法实现和仿真模块、DSP控制模块、及机器人驱动模块,以验证算法的有效性。
KUKA KRAGILUS工业机器人的实体控制测试:最终,项目工业机器人的实体控制。在LabVIEW建立的3D仿真
2023-12-21 20:03:18
//0.5
//#define KI_POSITION 0.02
比如:
高MAX_THROTTLE_PRO值会使机器人更快,但如果不能顺利恢复垂直位置,稳定性会降低。
高
2023-12-20 10:22:18
自动移液机器人, 全自动移液工作站在生物医学研究、化学实验以及临床诊断等众多领域,精确且高效的液体处理能力至关重要。而近年来,随着科技的飞速发展,一种名为“自动移液机器人”的设备应运而生,不仅
2023-12-06 11:21:24
领域的集大成者,主要应用于机器人控制领域,如AGV工业机器人控制器、智能机械臂控制器、机器人导航系统等。
ROS系统主要特点有哪些
(1) 提供丰富的机器人算法库机器人的各种控制以及通信离不开算法
2023-11-30 16:01:01
pic单片机做扫地机器人有什么优势
2023-11-09 07:24:46
机器人编程需要什么软件
2023-11-01 07:34:30
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
2023-10-21 20:59:28
本文档的主要内容详细介绍的是Arduino教学机器人的使用教程
2023-09-27 06:53:26
人的正常生活中去,是社会关注的主要问题之一。智能轮椅又称轮椅式移动机器人,具有记忆地图,避障.自动行走、与用户交互及为用户提供特殊服务等功能,可以为行动不便人群提供帮助。智能轮椅将智能机器人技术应用于
2023-09-25 07:13:35
在本项目中,我们将学习如何使用带PID控制器的线跟随机器人使用Arduino Nano来解决迷宫。
2023-09-25 06:54:13
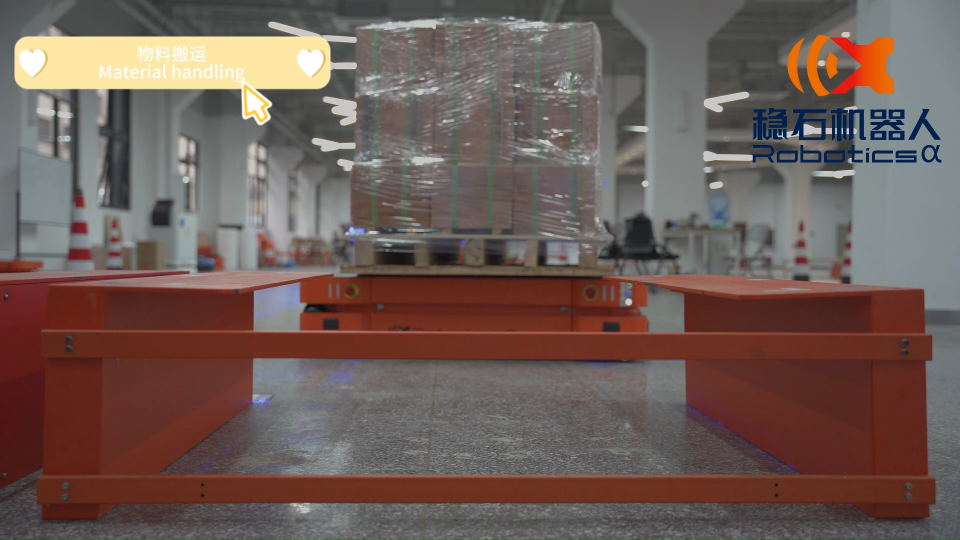
不同产品的上下料和运输要求,从而满足多样化的生产需求,并大幅减少了成本投入,为企业降本增效。
项目亮点
效率提升,质量保障
稳石机器人WS300s自主移动机器人进行的上下料、运输作业,大幅减少了人员
2023-09-21 13:45:14
用esp8266做过小四足机器人,这次用esp32C3重制了,主要的原因是C3有蓝牙可以用蓝牙遥控非常方便边,随时连接随时玩不占用手机WiFi。
而且esp32C3虽然管脚不多,但在8路舵机的控制
2023-09-21 11:15:37
的运营成本、人力成本还在不断提高(如:办公场地的租金、员工的工资、社保公积金、节假日福利等)。
如今的智能电话机器人,每天的电话拨打量可达800-1000通,相比人工提高了3-5倍,大大缩短了名单的筛选
2023-09-21 11:09:59
树莓派综合项目2:智能小车(四)超声波避障Python代码和电路图,Python3运行环境,配合我的其它相关文章,可以完美搭建出树莓派遥控小车,代码中有详细的注释,边动手边学习。文章中的代码可能排版有误,但此文件中的代码实测无误。
2023-09-21 08:27:03
迈步手部康复外骨骼机器人,机器人可以带动手指完成两种康复运动——双向弯曲运动和内收外展运动。机器人可适应不同患者的手指尺寸,外骨骼手的长度可调节,长时间佩戴不会使患者产生疲劳感。手部康复外骨骼机器人
2023-09-20 17:38:02
下肢外骨骼康复机器人BEAR-A1利用仿生学、人体工学、机器人技术,为下肢运动功能障碍者提供康复训练。通过对患者髋、膝关节提供助力完成康复训练,可以有效降低治疗师工作强度,提高康复训练效率,提高患者
2023-09-20 17:31:33
迈步机器人BEAR-H系列是用于辅助脑卒中患者步态康复训练的新型可穿戴式下肢外骨骼机器人。机器人拥有主动被动训练模式,通过对患者髋、膝、踝关节提供助力完成行走训练,可以节省人力,并提高康复效果
2023-09-20 17:25:48
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
2023-09-20 06:24:09
系统。
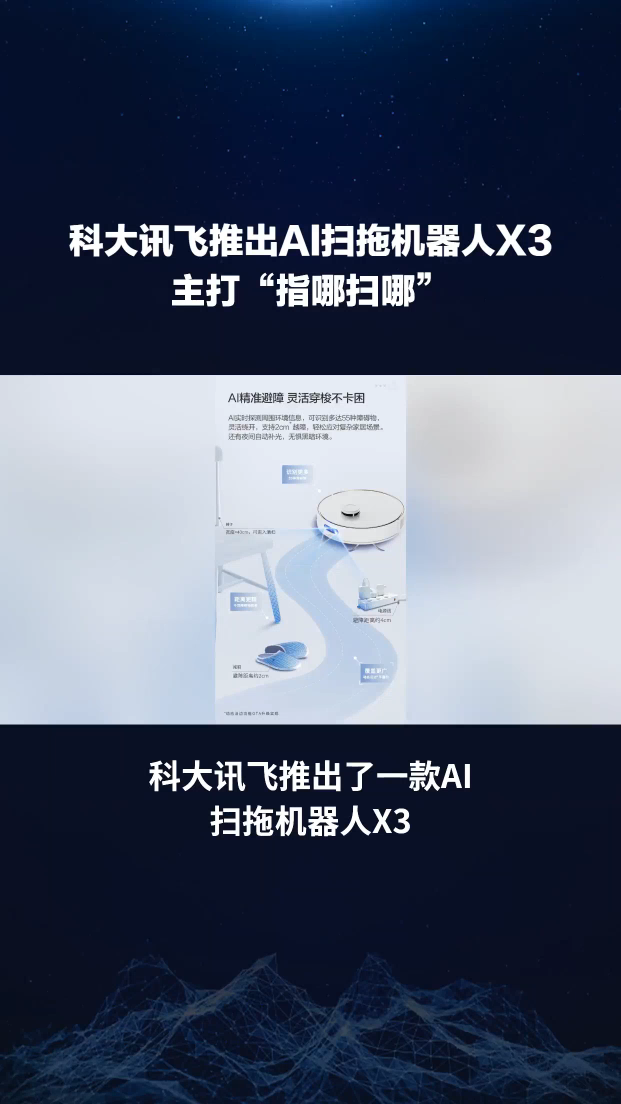
得益于核心部件的升级,现如今的扫地机器人已经具备结构光、3D Tof、AI识别等多种组合避障方式,这些避障方式都与广泛使用在扫地机上的TG30激光雷达息息相关。‘’
扫地机器人身上这么多
2023-09-06 09:39:54
产品介绍小安值班机器人是集电力监控系统、动环辅控系统、巡检机器人“三合一"功能产品,在自学习算法和大数据的加持下,具备强大的AI能力,可实现配电室的数字化及无人值守。 特色功能全感知电力
2023-08-22 14:57:47
3000mm,高度方向为 500mm。本实验只考虑室内采摘的情况。采摘过程如图3所示,a表示了采摘机器 人移动到草莓的正前方;b中机械手移动到果实的正上方;c中末端执行器夹爪 闭合;d果茎被剪断;e机械手
2023-08-16 17:35:54
机器人连接的远程I/O的IP地址即PROFINET转EtherNet网关ethernet端的IP地址;
10、添加一个链接;
11、设置好从站IP(本例为192.168.0.5)厂商ID为
2023-08-03 17:58:40
普密斯3D轮廓测量仪方案 3D GMS Pro,拥有高速移动测量平台,兼容多类型传感器,为客户需求提供快速、强力的技术支持! 产品特点—— 高速移动测量平台龙门架
2023-07-28 15:42:53
MRC3100系列AMR移动机器人控制器,适用潜伏顶升式、协作(复合)式、辊筒式等差速底盘类型移动机器人,内置激光导航及二维码导航算法,支持差速底盘运动模型。MRC3100系列自带丰富的I/O资源
2023-07-11 10:12:02
电子发烧友网站提供《如何制作3D机器人眼睛.zip》资料免费下载
2023-07-05 10:56:55 0
0 不要被复杂的生产线吓倒,生产线可以看成多个单独的设备或机器人,每部分完成一个功能。
2023-06-08 17:40:58
自编程是如何完成的。
自编程其实也不是很高深的问题。
当用户给出参数时,有时也包括逻辑。
例如用户说,如果设备打开完毕,执行一个命令。
这个例子就包括了一个如果。你的智能机器人只需要生成一个
2023-06-08 16:20:45
本案例是西门子1200PLC通过Profinet转Modbus TCP网关连接搬运机器人配置案例,所需设备为西门子1200PLC,耐用通信技术Profinet转ModbusTCP网关,搬运机器人
2023-06-07 11:16:06
机器人也是一种设备,它主要内容是完成一个制造的其中一个功能。
制造一个产品,可以分为几个部件。和装配几个部件。
一个部件,可以是一个模具。或者由机器人完成组成一个模具。
机器人主要完成的是一些模具
2023-06-06 16:18:33
追觅W10 Pro是2022年初推出的新品,相较前一代W10,两者间最大的区别是将LDS避障升级为了Tof+AI避障,扫地机本体前脸像给W10开了“大眼特效”的传感器和摄像头就是机械避障升级的最佳
2023-05-26 10:10:26
我正在开发一些 WSN 机器人,
我现在正在使用 2 个 ESP8266,一个充当 WSN 传感器节点,另一个充当机器人节点,
机器人在从其他 WSN 传感器节点获取数据时正在工作(现在亮起LED
2023-05-22 09:55:59
模型要具备齿轮,导轨几种基本的运动原理。
要分辨基本图形,视觉模型要能分辨圆形,方形和三角形。
有了这两点,机器人就基本上能计算开模和注塑这种简单的工作了。要替代人类的工作,还要进一步学习。
2023-05-19 20:40:25
儿童陪护机器人越来越受到人们的关注,其中转动控制是其重要组成部分之一。步进电机芯片作为一种常用的控制芯片,被广泛应用于儿童陪护机器人中的转动控制。本文将从步进电机芯片的工作原理、优势和应用场景等方面
2023-05-11 15:12:45
机器人关节电机是专业为机器人关节设计研发生产。电机既有中空大孔径,能保证关节模组完美融合的组合, 电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列电机转矩脉动极低,易于速度控制和精确
2023-04-20 10:07:10
RJU系列关节模组——面向商业、生活服务类应用一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身
2023-04-19 15:23:14
泰科关节机器人具备哪些优势? 一、编程简单可以让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏
2023-04-19 15:13:28
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 15:03:00
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 14:54:26
深圳泰科智能TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作
2023-04-19 11:43:30
深圳泰科智能TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作
2023-04-19 11:39:15
负荷的需求。既有强大的通用性、 协作性与开放性,适用于物流装配、流水线生产、上下料、AGV、3C电子、科研、医疗等行业。TA6系列协作机器人安装简单(安装方式任意
2023-04-19 11:14:26
。既有强大的通用性、 协作性与开放性,适用于物流装配、流水线生产、上下料、AGV、3C电子、科研、医疗等行业。TA6系列协作机器人安装简单(安装方式任意角度)及用
2023-04-19 10:58:47
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:53:03
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:48:11
,让机器人开发更自由高精度绝对值编码器,精准控制运动轨迹,多圈绝对值编码器分辨率标配16单圈和16多圈,保障机器人定位更精准、运行轨迹的稳定性更好减少机器人开发过程
2023-04-19 10:40:37
TB6-R3协作机器人是一款灵活的小型工业协作机器人,其精巧的机械结构设计,外形紧凑,能够适应狭小的工作空间,及高精密的工作任务需求;这款协作机器人自重仅为11.5KG,有效负载为3KG,工作半径达666mm,是轻型装配和高精度控制的理想选择。
2023-04-19 10:18:50
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-19 10:05:39
TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、航天、科研、教育等多个行业、多场景的自动化需求。
2023-04-19 09:38:36
TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作机器人功能强大、高自重负载比、高可靠性、模块化关节设计,易于末端扩展外部设备,可以实现快速安装部署。
2023-04-19 09:27:59
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。-
2023-04-19 09:22:29
TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产应用需求。模块化
2023-04-19 09:16:32
机器人关节电机是专业为机器人关节设计研发生产。电机既有中空大孔径,能保证关节模组完美融合的组合, 电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列电机转矩脉动极低,易于速度控制和精确
2023-04-18 17:35:19
模组组成的最小机器人自重仅15kg。安装简单RJS关节模组简化了机器人的装配流程,装配过程不再有繁复的零件组装和走线,一台6轴机器人仅需要2-3小时便能快速完成。
2023-04-18 14:04:34
,让机器人开发更自由高精度绝对值编码器,精准控制运动轨迹,多圈绝对值编码器分辨率标配16单圈和16多圈,保障机器人定位更精准、运行轨迹的稳定性更好减少机器人开发过程
2023-04-17 18:01:33
。既有强大的通用性、 协作性与开放性,适用于物流装配、流水线生产、上下料、AGV、3C电子、科研、医疗等行业。TA6系列协作机器人安装简单(安装方式任意角度)及用
2023-04-17 17:57:19
。既有强大的通用性、 协作性与开放性,适用于物流装配、流水线生产、上下料、AGV、3C电子、科研、医疗等行业。TA6系列协作机器人安装简单(安装方式任意角度)及用
2023-04-17 17:49:50
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 17:40:55
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。
2023-04-17 16:36:37
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 16:25:29
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 16:12:03
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:57:13
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3
2023-04-17 15:49:48
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3
2023-04-17 15:40:56
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:31:15
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:25:07
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:15:06
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:07:26
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:02:00
口上面,当机器人开始加水时,传感器会检测水位并将数据发送到一个微处理器。微处理器会根据清水箱的容量,来判断是否需要再次填充水。如果水位已满,机器人将停止加水。污水箱中也有水位传感器,但这个传感器测量
2023-04-15 11:21:46
控制,通过GPS和5G实时定位巡检机器人的位置来实现日常例行任务和特训两种方式的巡检;(3) 自动充电,低电自动返航能够自主判断电池电量状态,电量不足自动返航,并与充电设备配合完成自主充电;(4) 自主避障
2023-04-12 15:49:23
科研教育利器| 能打印“工业级功能件”的桌面级3D打印机 iLux Pro EngineeringiLux Pro Engineering 桌面级LCD 3D打印机是目前行业鲜有的可打印功能性产品
2023-03-31 15:19:08
 电子发烧友App
电子发烧友App

















 工商网监
工商网监
评论