01 内容概览 现有技术缺点 线性与稳定难兼顾 :传统水下传感器(如电容式)线性范围小(仅10kPa)或稳定性差(离子型易受水干扰),无法适配高压/湍流水下环境。 信号处理复杂 :现有神经形态
2026-01-05 17:56:02 90
90 
12月24日,中航光电自主研发的压力平衡式水下湿插拔光电混装连接器成功通过挪威船级社(DNV)认证,成为国内首例通过该权威认证的压力平衡式水下湿插拔光电混装连接器产品。此次通过认证标志着中航光电在
2025-12-31 17:15:411336 
本文将介绍如何使用 LPS28DFW 传感器来读取的压强数据,来估算水下深度,可以利用液体静压的原理。
2025-12-22 14:47:13276 
用技术击穿深海屏障,让水下世界“看得见、听得着” —— 这,就是超声波水下通信换能器的核心目标!
2025-12-22 11:19:02198 
——基于2025中国海洋经济博览会的调研报告本文基于对2025年中国海洋经济博览会的实地调研,总结水下无线光通信技术在海洋领域的应用现状。根据调研发现,该技术尚未形成规模化刚需,主要受限于实际
2025-12-19 17:32:002586 
水下机器人技术是人类认识海洋、开发利用海洋的主要手段之一,在水下作业、水下搜救、侦察、雷达、通信导航等诸多领域有重要应用。
2025-12-09 16:36:22405 
在浩瀚的海洋深处、湍急的河流岸边,或是工业储罐的密闭空间,传统传感器往往因无法抵御水汽侵蚀而失效。而防水型超声波传感器,凭借其独特的防水设计与精准的探测能力,正成为水下环境监测、资源勘探与工业控制
2025-12-05 16:08:34169 、水下通信设备测试及传感器标定,系统需在真实作业条件下完整捕获水下声场的时频特征与空间特性,为装备研发提供可靠数据支撑。
2025-12-04 11:32:02544 
800万智能星光网络机芯,凭借其突破性的硬件架构与智能算法,为水下成像提供了从“可见”到“可析”的革新方案。 核心性能:突破水下环境限制的硬件基石 CM8810E搭载1/2.8”Sony Starvis逐行扫描CMOS传感器,以800万总像素实现3840×2160@30fps超高清输出
2025-12-01 17:07:48452 1产品概述基于中科亿海微FPGA的水下多通道信号采集卡由FPGA处理单元、输入信号切换单元、信号调理单元、ADC单元、DAC单元、姿态传感器单元、以太网接口单元,以及配套软件组成。FPGA处理单元
2025-11-28 17:40:11184 
当前,“十五五”规划将海洋强国建设提升至新高度,明确要求强化海洋科技自主创新能力,并安排中央预算内投资支持海洋领域重大项目建设;深海装备正向智能化、绿色化、长寿命化演进,这对水下连接技术提出了极高
2025-11-24 15:55:08227 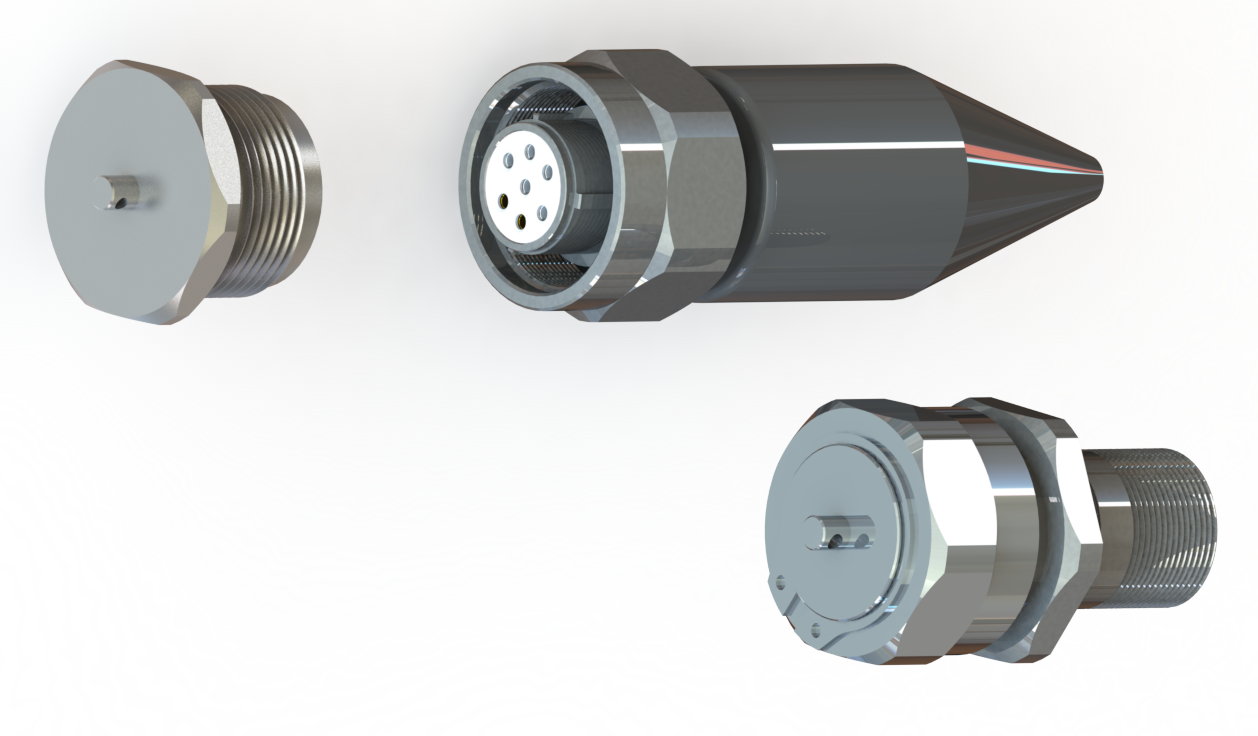
随着影视创作对特殊场景影像需求的不断升级,传统水下拍摄方式的局限日益显现。摄影师往往需携带重型设备进行潜水拍摄,在光线昏暗、水流复杂等环境下,不仅面临沟通滞后与安全风险,还要应对运镜稳定性不足
2025-11-18 14:38:19531 一、项目背景 南海某油气平台需要对水下 220 m 管汇进行连续气体泄漏监测与工艺参数采集。平台主控系统采用西门子 S7-1215C PLC,通信接口为 Profinet;而水下仪表全部为
2025-11-14 10:32:02591 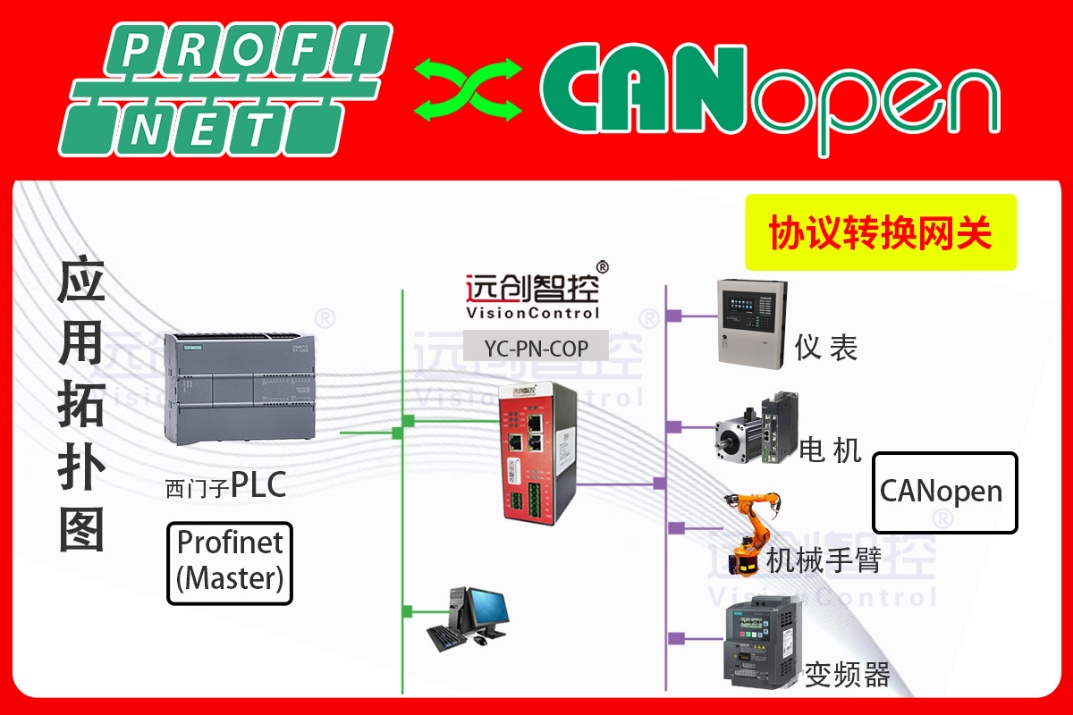
在人类探索自然的进程中,水下世界始终充满神秘与挑战。从深海资源勘探到水下生态监测,从紧急救援打捞到工业水下作业,每一项任务的开展都离不开精准的数据采集与稳定的信号传输。然而,水下环境的特殊性——高压
2025-11-05 15:20:24204 在智能穿戴、无人机、机器人、VR/AR等高速发展的智能设备领域,精准、稳定、实时的姿态感知能力已成为产品竞争力的关键。HLK-AS201-9九轴姿态传感器模块,采用纯国产方案,凭借其高度集成、高精度解算、强抗干扰能力,成为工业与消费级应用的理想选择。新品上市,诚邀体验
2025-10-27 15:32:06675 
水下目标智能识别系统平台全面解析
2025-10-17 17:09:38259 
作为深耕激光雷达领域 10 年的 “感知探索者”,北醒的产品已覆盖从空中无人机到地面机器人的众多场景。随着泳池清洁机器人行业走向规模化,我们的感知视野也进一步延伸至水下,并且已经为泳池清洁机器人客户批量交付超过10万台单点激光雷达。
2025-10-15 17:42:311367 在海洋经济与深海科技蓬勃发展的今天,水下作业的精度与效率已成为衡量技术实力的核心指标。传统声呐设备受限于声波传播的物理特性,在复杂水下环境中常面临分辨率不足、抗干扰能力弱等痛点。而上海思岚
2025-10-09 08:34:17416 
ANSA的人体模型姿态调整工具(HBM Articulation Tool)通过网格变形技术实现基于人体不同部位进行调节,定位人体模型最终的姿态。
2025-09-28 15:40:10801 
点击蓝字关注我们随着5G技术的深度渗透与6G研发的加速推进,光通信作为信息传输的“主动脉”,正不断向更广阔的场景延伸--从浩瀚宇宙的空间互联,到深邃海洋的水下探测,光通信技术正打破场景边界,成为推动
2025-09-25 18:03:082100 
在海洋勘探、水下安防、深海科考等领域,水下通信是连接“水下设备”和“地面系统”的关键。从水下机器人的实时控制,到深海热泉观测的高清视频回传,到水下安防的隐蔽数据传输,这些都离不开稳定、高效的通信
2025-09-22 16:25:501714 提供提供精准测量解决方案,Flexfilm探针式台阶仪可以实现表面微观特征的精准表征与关键参数的定量测量,精确测定样品的表面台阶高度与膜厚,为材料质量把控和生产效
2025-09-17 18:03:09534 
水下通信技术长期以来面临着成本与性能难以兼顾的挑战。传统的水下通信设备往往依赖于声学通信或射频通信,但这些方式在浅水环境中存在明显的局限性:声学通信延迟大、带宽低;射频通信在水体中衰减极快,传输距离
2025-09-17 17:55:211781 
中图仪器6D空间姿态激光跟踪测量仪集激光干涉测距技术、光电检测技术、精密机械技术、计算机及控制技术、现代数值计算理论于一体,是高精度、便携式的空间大尺寸坐标测量机,是同时具高精度(μm级)、大工
2025-09-17 15:27:30
在泳池清洁机器人的核心部件中,电机的可靠性和寿命直接决定了整机性能。面对复杂的水下工作环境,选择合适的灌封胶至关重要,施奈仕CC4010Q聚氨酯灌封胶正是为此而生。
2025-09-12 17:14:22524 
9月10日,光峰科技在第26届中国国际光电博览会(CIOE)现场举行水下激光雷达发布会,正式官宣发布两款水下激光雷达产品——远眸D10、远眸T1,将覆盖消费级和专业级水下机器人市场。
2025-09-10 16:40:33839 100 米深的水下,每平方厘米压着 10 公斤力,普通 BNC 接头往下一放,要么进水短路,要么被压变形 —— 可水下探测、海洋通信又离不了它。德索精密工业的工程师常说:“水下连接器哪是‘防水’这么简单,得给信号造个‘抗压堡垒’才行。”
2025-09-03 10:10:002628 
在组合导航领域,航向角精度是设备的生死线,无论是低空无人机航拍的影像拼接,还是测绘工程的方向基准校准,一丝航向误差都可能导致最终成果偏离规范要求。同为MEMS组合导航方案,为何部分产品航向精度仅能
2025-09-02 14:29:59522 *附件:ATA-M8功率放大器V1.3.pdf
带宽:(-3 dB)10kHz~500kHz
电压:690Vrms
功率:800VA
过流保护、过温保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-29 18:18:03
*附件:ATA-M4功率放大器V1.4.pdf
带宽:(-3 dB)10kHz~500kHz
电压:345Vrms
功率:400VA
过流保护、过温保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-29 18:17:09
*附件:ATA-M2功率放大器V1.4.pdf
带宽:(-3 dB)10kHz~500kHz
电压:175Vrms
功率:200VA
过流保护、过温保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-29 18:16:47
*附件:ATA-L50单页手册V1.3.pdf
带宽:(-3dB)200Hz~120kHz
电压:1200Vrms
功率:6500VA
阻抗:输出阻抗匹配多档可调
保护:过流保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-28 13:54:03
*附件:ATA-L30单页手册V1.3.pdf
带宽:(-3dB)200Hz~120kHz
电压:1200Vrms
功率:4000VA
阻抗:输出阻抗匹配多档可调
保护:过流保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-28 13:51:32
*附件:ATA-L20单页手册V1.3.pdf
带宽:(-3dB)200Hz~120kHz
电压:1200Vrms
功率:2600VA
阻抗:输出阻抗匹配多档可调
保护:过流保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-28 13:51:04
*附件:ATA-L10单页手册V1.3.pdf
带宽:(-3dB)200Hz~120kHz
电压:1200Vrms
功率:1300VA
阻抗:输出阻抗匹配多档可调
保护:过流保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-28 13:49:47
*附件:ATA-L8单页手册V3.0.pdf
带宽:(-3dB)200Hz ~ 120kHz
电压:1020Vrms
功率:1000VA
阻抗:输出阻抗匹配多档可调
保护:过流保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-28 13:49:15
*附件:ATA-L8B单页手册V1.1.pdf
带宽:(-3dB)40Hz~150kHz
电压:1200Vrms
功率:1000VA
阻抗:输出阻抗匹配多档可调
保护:过温、过压、过流、短路、空载保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-28 13:47:49
*附件:ATA-L6单页手册V3.0.pdf
带宽:(-3dB)200Hz~120kHz
电压:1020 Vrms
功率:600VA
阻抗:输出阻抗匹配多档可调
保护:过流保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-28 13:47:18
*附件:ATA-L4单页手册V3.0.pdf
带宽:(-3dB)200Hz ~ 120kHz
电压:848Vrms
功率:400VA
阻抗:输出阻抗匹配多档可调
保护:过流保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-28 13:45:53
*附件:ATA-L6B单页手册V1.1.pdf
带宽:(-3dB)40Hz~150kHz
电压:1200Vrms
功率:800VA
阻抗:输出阻抗匹配多档可调
保护:过温、过压、过流、短路、空载保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-28 13:45:47
*附件:ATA-L2单页手册V3.0.pdf
带宽:(-3dB)200Hz ~ 120kHz
电压:424Vrms
功率:200VA
阻抗:输出阻抗匹配多档可调
保护:过流保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-28 13:44:12
*附件:ATA-L2B单页手册V1.1.pdf
带宽:40Hz~150kHz
电压:300Vrms
功率:260VA
阻抗:输出阻抗匹配多档可调
保护:过温、过压、过流、短路、空载保护
应用:水下通信、石油勘探、水声换能器驱动、变压器老化、磁芯损耗测试、水下测距、超声驱鱼
2025-08-28 13:43:38
NS系列探针式台阶高度测量仪线性可变差动电容传感器(LVDC),具有亚埃级分辨率,13μm量程下可达0.01埃。高信噪比和低线性误差,使得产品能扫描到几纳米至几百微米台阶的形貌特征。通过2μm金刚石
2025-08-26 14:19:50
电子设备在水下、潮湿、高温、盐雾等恶劣环境下易失效?传统灌封胶流动性差、固化后易开裂?针对新能源、智能汽车、水下设备等领域面临的恶劣环境挑战,施奈仕推出经过市场验证的双组分聚氨酯灌封胶CC4010Q,为电子设备提供持久可靠的防护方案。
2025-08-25 17:20:491544 
*附件:ATA-5620单页资料V2.3.pdf
带宽:(-3dB)1kHz~100MHz
电压:2Vp-p(50Ω)
电压增益:60dB
应用:无损检测、微小信号放大、微弱磁场检测、水下测距、噪声测试
2025-08-20 18:13:30
*附件:ATA-5610单页资料V2.3.pdf
带宽:(-3dB)1kHz~100MHz
电压:2Vp-p
电压增益:46dB
应用:无损检测、微小信号放大、微弱磁场检测、水下测距、噪声测试
2025-08-20 18:11:13
*附件:ATA-5520单页资料V2.3.pdf
带宽:(-3dB)1kHz~50MHz
电压:2Vp-p
电压增益:60dB
应用:无损检测、微小信号放大、微弱磁场检测、水下测距、噪声测试
2025-08-20 18:11:08
蔡司光学测量家族系列:以非接触式精准,守护工业质量高度
2025-08-15 16:46:151587 
工程师说的:“水下焊接的防水,不是堵漏洞,是让整个连接系统学会跟水‘和平相处’。”这也是德索的水下TNC连接器能在深海设备上站得住脚的原因。
2025-08-14 11:01:38516 
在深邃神秘的海洋中,水下蛙人承担着众多关键任务,如军事侦察、水下作业、设施检查以及公共安全救援等。然而,传统的水下通信手段在语音对讲方面存在诸多局限,极大地影响了水下任务的效率和协作效果。而
2025-08-08 09:39:36920 
在人类探索海洋深处的过程中,水下通信技术始终扮演着至关重要的角色。无论是海洋科学研究、水下资源勘探,还是水产养殖等众多领域,可靠的水下通信设备都是实现信息传输、设备操控与数据收集的关键。然而,传统
2025-08-07 09:45:392090 
在海洋探测中,声波是目前已知的唯一能在水下远距离传播的能量形式,在水下定位和通信中有着广泛应用。利用水声进行海洋探测时,主要依靠压电效应进行“电—压—声”的能量转换进行发射,以声波的形式在海洋中进
2025-08-01 18:00:51544 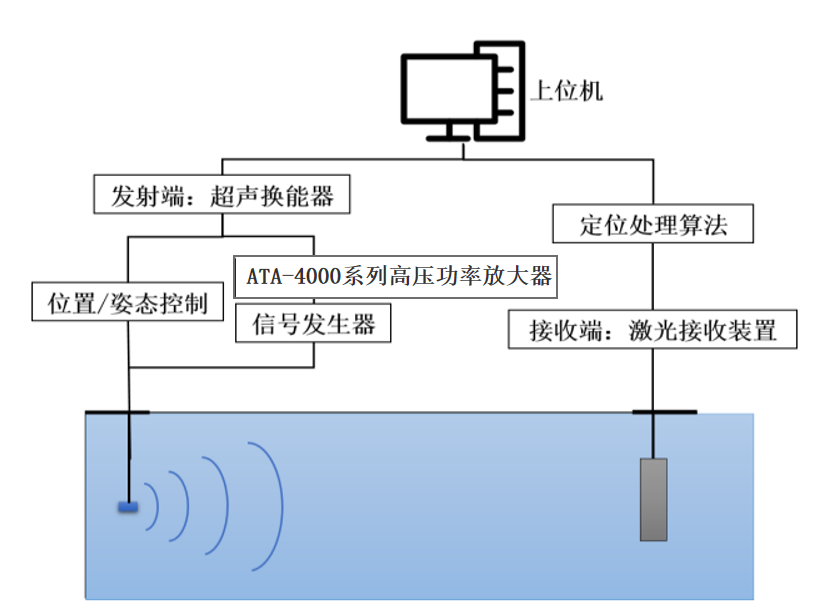
在工程机械、卫星天线、桥梁监测等领域,精准的姿态测量和角度控制至关重要。ER-3MG-041超小尺寸三轴寻北MEMS陀螺仪,凭借其紧凑设计、高精度和卓越稳定性,成为各类惯性导航和姿态测量的理想选择。它不仅体积小巧、重量轻,还可支持OEM定制,满足不同应用场景的严苛需求。
2025-08-01 15:47:15870 
GTS系列6D姿态激光追踪测量仪集激光干涉测距技术、光电检测技术、精密机械技术、计算机及控制技术、现代数值计算理论于一体,是高精度、便携式的空间大尺寸坐标测量机,是同时具高精度(μm级)、大工作空间
2025-07-23 13:41:22
光子精密推出了QM系列闪测仪 + CD-5000系列光谱共焦位移传感器的组合,以高性价比的解决方案,满足用户的多重测量需求。
这一方案既能助用户精准完成轮廓与高度测量、也满足了便捷式使用需求,同时还能有效降低成本,为企业的生产检测环节提供更经济高效的选择。
2025-07-23 09:23:02549 
台阶高度作为纳米结构的关键参数,其测量精度直接影响相关研究与应用。本文利用触针式轮廓仪对三台阶高度样品进行测量与表征的方法。原始测量数据通过多项式拟合与低通滤波处理消除低频伪影和高频噪声。实现了
2025-07-22 09:52:51562 水下环境感知对机器人操作至关重要。由于柔性传感器能够适应各种形状和表面,因此在深海生物捕获、环境检测和机械操作等科学应用中具有广泛的应用前景。然而,面对复杂的水下环境,实现水下柔性传感器以满足众多
2025-07-17 11:51:534563 
水下目标智能识别系统软件平台
2025-07-16 15:28:15413 
在当今科技飞速发展的时代,精准导航已成为众多领域不可或缺的关键技术。从大型无人机的高空作业,到智能无人车辆的地面行驶,再到自主水下航行器的探索,高精度、高可靠性的导航系统是保障任务顺利完成的核心
2025-07-14 16:44:05598 
C01模组是一款专为水下复杂环境设计的无线数据传输传感器,基于超声波调制解调技术,实现水下中短距离数据通信。产品具备快速遥控、多字节通信、定位,纠偏等功能 功能矩阵:遥控功能:使用手机通过
2025-07-05 15:43:57
的测量系统。产品输出载体的精确姿态可用于全姿态旋转系统。该产品具有硬铁、软铁和倾斜补偿功能,能够输出高精度测量校准后的航向。利用三轴磁通门使用 CPU 实时计算航向,
2025-07-03 10:47:08
在无人机飞行、自动驾驶或水下探测等场景中,GNSS信号遮挡或干扰是常见挑战。ER-GNSS/MINS-03组合导航系统凭借深度融合的GNSS/INS技术,即使在卫星信号中断时,也能持续提供高精度定位、姿态和速度数据,确保任务不间断执行。
2025-07-02 15:29:55625 
泳池清洁机器人进入消费级无线通信时代!在泳池清洁领域,高效与智能是永恒的追求。我们全新推出的泳池清洁机器人C01水声通信模组,以尖端科技打破水下通信壁垒。该模组采用先进的水声通信技术,实现机器人
2025-06-26 16:58:031289 
提供重要的数据支持。
(三)水下机器人导航
对于水下机器人来说,超声波水下测距换能器是其导航系统的重要组成部分。它可以实时测量机器人与周围障碍物的距离,帮助机器人在复杂的水下环境中安全地航行,避免碰撞
2025-06-26 10:43:32
在无人机测绘、无人车导航、水下航行器定位等前沿领域,高精度、连续可靠的导航信息是任务成功的关键。然而,城市峡谷、桥梁隧道、茂密森林或水下环境常常导致卫星信号(GNSS)中断,传统导航系统精度骤降甚至
2025-06-23 09:20:51461 水下成像技术主要基于声波传播原理。声波能够在水中传播,技术通过发射声波脉冲并接收其反射信号形成水下景象的成像。具体步骤如下: 发射声波脉冲:功率放大器将电信号转化为声波信号并向水中发射。 声波传播
2025-06-20 18:06:02444 
很荣幸的向大家宣布:业内首个消费级水下激光雷达、RPLIDAR家族新成员,RPLIDARU1正式发布!从此,水下世界也将开启高精度激光SLAM导航时代。体积小巧,面向消费级应用行业内水下激光雷达
2025-06-20 16:16:05899 
在此背景下,肇观电子推出全球首创W系列水下机器人视觉模组,以光学视觉革命突破水下感知瓶颈!
2025-06-17 14:58:191264 
在现代照明领域,防水灯具的应用越来越广泛,无论是户外景观照明,还是水下特殊环境照明,都离不开防水灯具的支持。然而,防水灯具的气密性直接关系到其防水性能、使用寿命和安全性,水下灯具气密性检测仪则成为
2025-06-14 15:09:26345 
,再接收反射回来的超声波信号,经过计算机处理后形成人体内部器官的清晰图像。通过这些图像,医生可以观察胎儿在母体内的发育情况,检查内脏器官是否存在病变,如肿瘤、囊肿等,帮助制定精准的治疗方案,为无数患者带来
2025-06-11 17:30:56
传感器IMU是LSM6DSL型号,磁强计是LIS3MDL型号,使用motionfx库进行姿态解算,遇到航向角不准确的问题。我查看地磁计的值是正常的,但是航向角不正常:例如传感器指向正北,地磁计X轴
2025-06-10 07:19:58
在城市的广场、公园或者豪华酒店的景观池中,水下喷泉灯以其绚丽多彩的灯光效果,为人们营造出如梦如幻的水下世界。然而,水下喷泉灯长期处于水下环境,其气密性直接关系到灯具的使用寿命和安全性。水下喷泉灯
2025-06-03 17:20:08538 
GTS系列激光跟踪6D姿态智能测量仪是高精度、便携式的空间大尺寸坐标测量机,是同时具高精度(μm级)、大工作空间(百米级)的高性能光电测量仪器,可以和多种形式的合作目标测头配合使用,能够解决大型
2025-06-03 15:48:29
2025年4月15日至16日,武汉六博光电技术有限责任公司科研团队于中国黄海海域完成一项具有里程碑意义的水下通信实验——其自主研制的LED水下光通信系统在浑浊水质环境下,以5Mbps的通信速率实现了
2025-05-29 17:38:241901 水下灯具气密性检测仪对于保障水下灯具的质量和安全性至关重要,以下为你详细介绍其正确的使用和维护方法:(一)正确使用方法使用前准备检查外观:仔细查看检测仪外观是否有损坏、变形,各连接部位是否松动,确保
2025-05-26 11:47:23392 
飞控上的地磁传感器,也称为指南针或磁罗盘,在无人机飞行控制系统中扮演着至关重要的角色。其主要作用如下:一、测量航向与方向地磁传感器能够根据地磁向量,求出飞行器与磁北的夹角,从而准确测量无人机的航向
2025-05-19 13:16:121904 
。而在2025年5月23日至25日举办的第十届深圳国际无人机展览会上,凯茉锐电子(展位号:1号馆1D175)携索尼FCB-EV9520L一体化摄像机模组亮相,为工业巡检、水下探测、安防监控等领域提供新一代视觉解决方案,进一步凸显了该模组在多场景下的技术优
2025-05-15 15:09:38609 GTS运动部件姿态激光跟踪测量仪是同时具高精度(μm级)、大工作空间(百米级)的高性能光电测量仪器。能够解决大型、超大型工件和大型科学装置、工业母机等全域高精度空间坐标和空间姿态的测量问题,如可以
2025-05-12 11:06:38
在海洋资源开发、生态保护与科学探索需求激增的背景下,水下机器人技术正经历深刻变革。当索尼FCB-EV9520L一体化摄像机模组与水下机器人实现技术融合,这场跨界协作不仅突破了传统深海探测的视觉边界
2025-05-09 10:58:48417 中图仪器6D姿态激光跟踪测量仪用于百米大尺度空间三维坐标的精密测量,集激光干涉测距技术、光电检测技术、精密机械技术、计算机及控制技术、现代数值计算理论于一体,可用于尺寸测量、安装、定位、校正和逆向
2025-05-08 15:49:31
水下灯具由于使用环境特殊,对其气密性要求极高。使用水下灯具气密性检测仪能有效检测灯具密封性,保证产品质量。以下为您详细介绍其使用方法。(一)前期准备(1)环境检查要确保水下灯具气密性检测仪放置在远离
2025-04-29 14:54:18480 
试验,找到了一些问题点,希望能得到官方的技术支持。
问题1:原先我水平旋转传感器,航向角的误差很大,比如说误差30度。通过我反复测试后发现是陀螺仪零漂的问题,motionfx库设置静态时校准零漂,但是当
2025-04-27 08:59:32
传感器IMU是LSM6DSL型号,磁强计是LIS3MDL型号,使用motionfx库进行姿态解算,遇到航向角不准确的问题。我查看地磁计的值是正常的,但是航向角不正常:例如传感器指向正北,地磁计X轴
2025-04-23 08:11:24
suboff潜艇作为一种常见的水下航行器模型,曾在国际上被各大海洋强国进行充分的实验与数值模拟研究,本文以suboff模型对水下航行器阻力计算展开介绍。
2025-04-11 11:36:38739 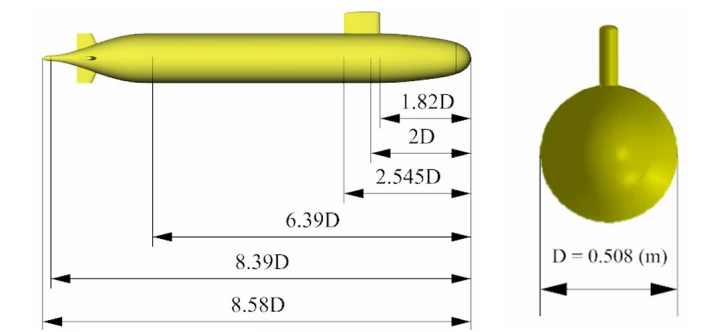
中图仪器NS系列半导体台阶高度测量仪器是一款专为高精度微观形貌测量设计的超精密接触式仪器,广泛应用于半导体、光伏、MEMS、光学加工等领域。通过2μm金刚石探针与LVDC传感器的协同工作,结合亚埃级
2025-03-31 15:08:10
激光位移传感器凭借微米级测量精度、高速响应能力以及对高反光/透明材质的强兼容性,可精准捕捉高速产线中易变形塑料叶片的高度变化,为工艺优化提供可靠数据支撑。检测需求
2025-03-24 08:16:33843 
中图仪器GTS空间姿态激光跟踪测量仪是高精度、便携式的空间大尺寸坐标测量机,是同时具高精度(μm级)、大工作空间(百米级)的高性能光电测量仪器。在飞机、汽车、船舶、航天、机器人、核电、轨道交通装备
2025-03-21 17:01:59
防水连接器是一种具有防水功能的电子连接器,通常用于户外、水下或湿润环境中的电器设备和电路连接。电子谷作为行业领先的连接解决方案平台,其防水连接器通过采用专业材料、密封结构等工业设计方式,可以有效地
2025-03-13 07:32:00698 
IMU惯性测量单元,融合加速度计、陀螺仪和磁力计的核心传感器,实现高精度姿态解算
2025-03-07 14:09:172243 
前言高度测量显微镜显微镜配备了操作简单,功能强大的测量软件,客户可根据需要设置测试偏好。软 件附带了各类手动取点与自动取点的测量功能,适功能高度集成的一体式设计使用范围更广,即使对复杂的形状,也可以
2025-03-07 10:58:49
mpu6050航向角漂移很严重的原因及解决方案
2025-03-01 11:47:454557 (UAV)/自主水下航行器(AUV)以及导航级MEMS系统中的精确姿态与方位测量、定位、导航和制导而设计。ER-MG2-300/400具有高动态测量范围和高精度,
2025-02-28 09:57:49
在浩瀚无垠的蓝色疆域中,水下机器人正成为人类探索未知、揭开深海神秘面纱的重要工具。随着科技的飞速发展,这些智能潜水器不仅能够在极端环境下作业,还搭载了各种高精度传感器与摄像设备,其中,索尼FCB模组
2025-02-26 11:41:26610 声纳探测器解决方案总述:声纳探测器是一种利用声波在水下传播特性来探测目标的设备。它通过发射声波,然后接收目标反射回来的回波,根据回波的时间、频率和幅度等信息,确定目标的位置、形状、大小和运动状态等
2025-02-24 13:49:321590 
Wi-Fi模块,可以实现数据无线传输,将姿态数据上传至服务器或云端,便于实时监测。 然而,MPU6050 没有磁力计,直接使用陀螺仪的角速度积分计算yaw角(航向角)会导致累积漂移。本次实验采用优化后的互补滤波,减少漂移,提高yaw角的计算精度。 一、硬件连接 MP
2025-02-20 17:54:232967 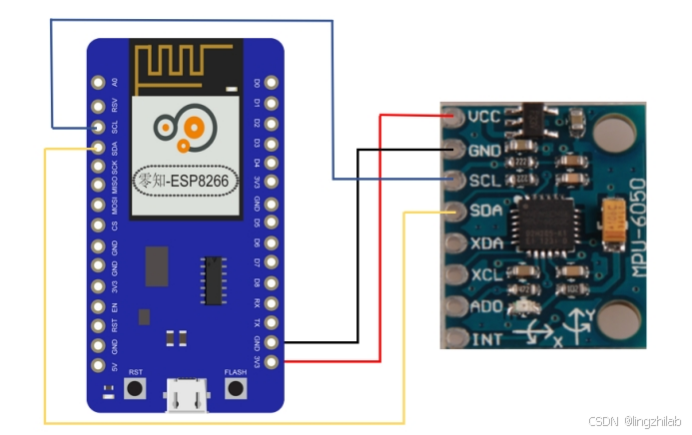
惯性测量单元(Inertial Measurement Unit,简称IMU)是一种能够测量物体运动状态的装置,广泛应用于定位、姿态测量和导航等领域。IMU通过内部集成的传感器,能够实时、准确地获取
2025-02-03 14:19:003128 为了提高自主水下航行器(Autonomous Underwater Vehicle, AUV)末端光学导引回收的精度,本文提出了一种可靠的导引回收方法,旨在为AUV在能源补充、数据传输和指令下达等方面提供更快的解算速度、较低的算力功耗需求以及较少的能量消耗。
2025-01-22 11:43:08993 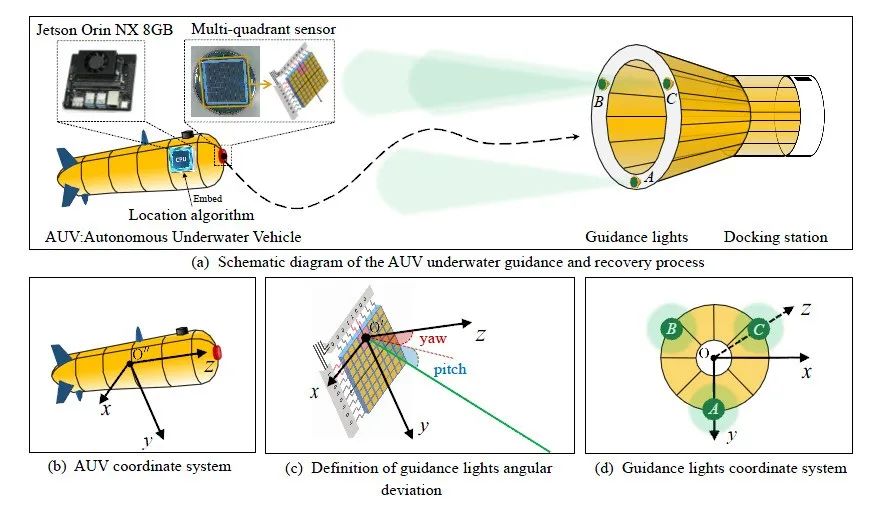
近年来,人类海洋活动日益扩大,水下无线传感器网络、光/声学成像探测技术和水下航行器等技术快速发展,迫切需要高数据传输速率的水下无线通信技术的支持,以实现观测数据的传输及控制指令的交换。相对于传统
2025-01-16 17:47:051252 海凌科电子近日全新推出了HLK-AS2001十轴姿态传感器模块,该模块集成了加速度计、陀螺仪和磁力计,并自带BLE5.0蓝牙功能,为用户提供了开发简便、应用广泛的姿态检测解决方案
2025-01-09 14:42:311140 水下通信是涉及多个学科的复杂问题,其中核心在于如何有效地将电信号转化为能在水中传播的声波。水声通信系统的主要组件是水声换能器,它负责将电信号转化为声波,并反之亦然。然而,要驱动水声通讯换能器,需要
2025-01-08 10:23:48874 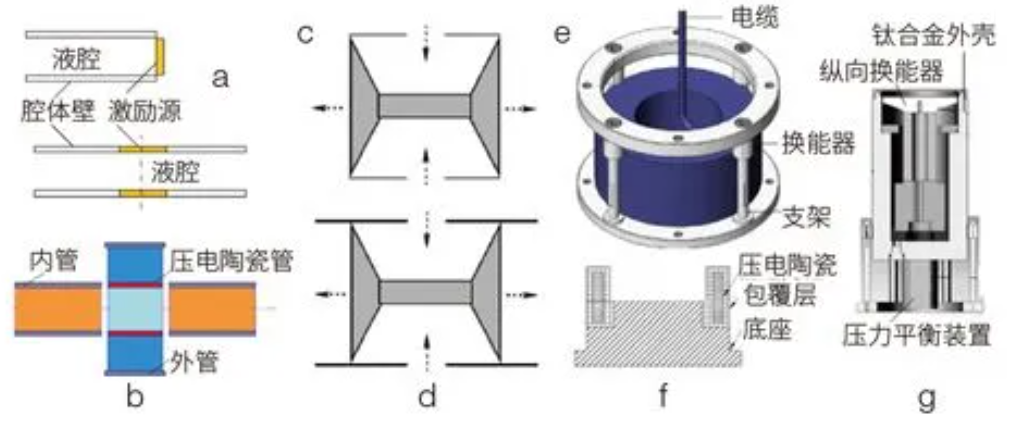
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论