 电子发烧友App
电子发烧友App


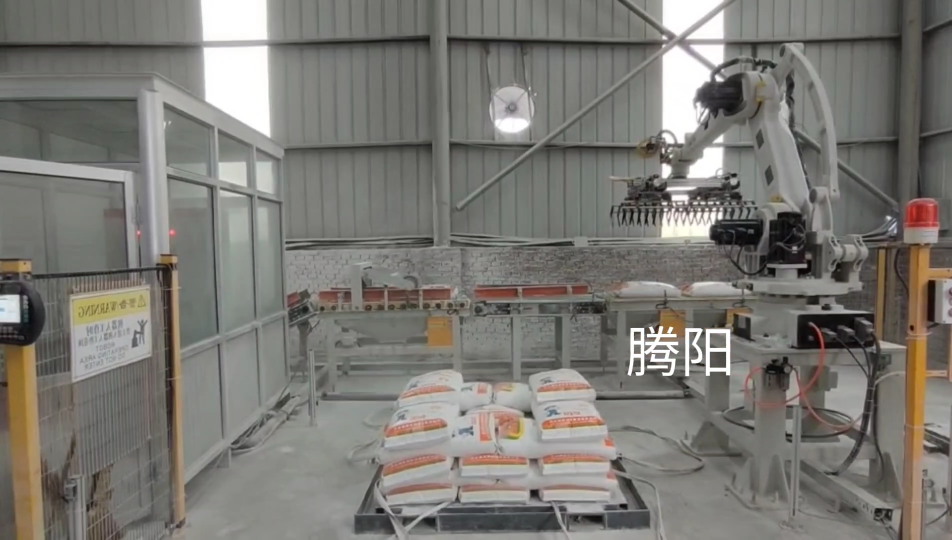
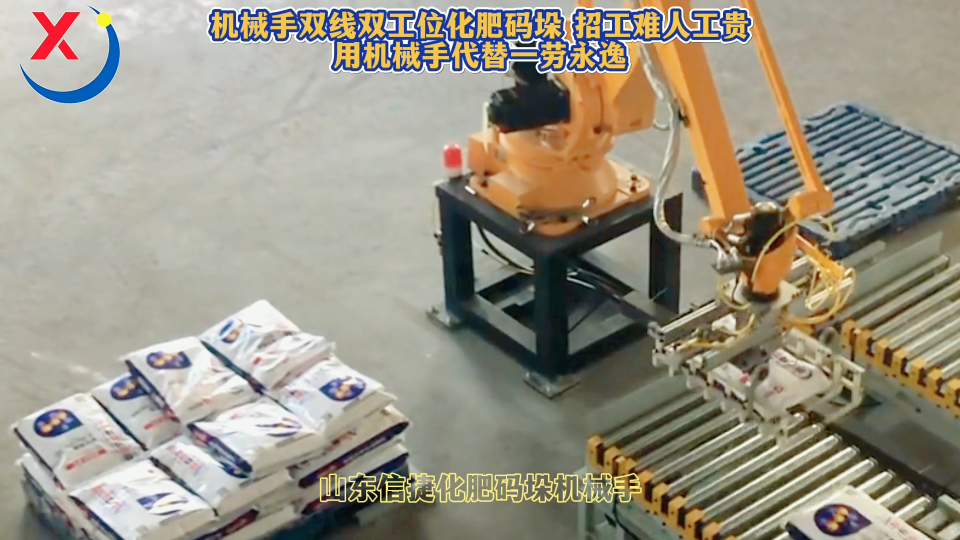
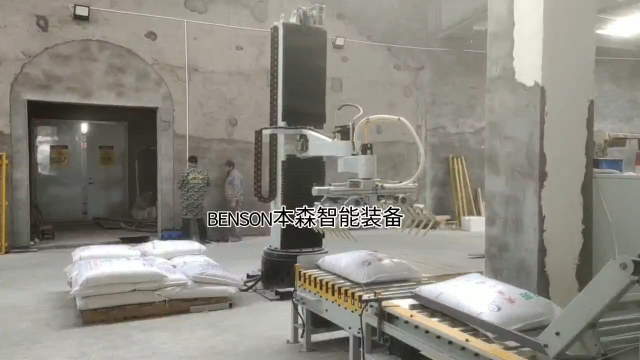
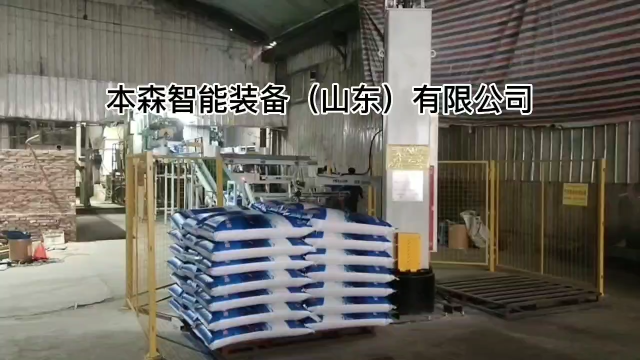
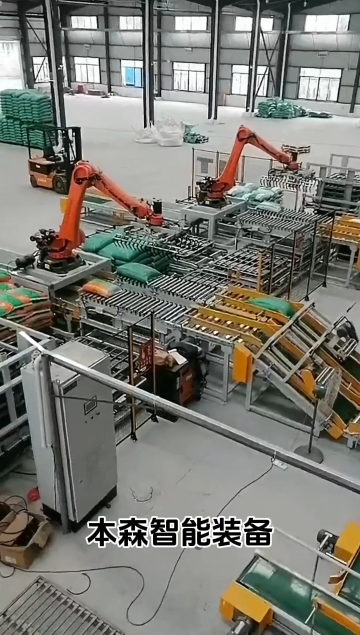
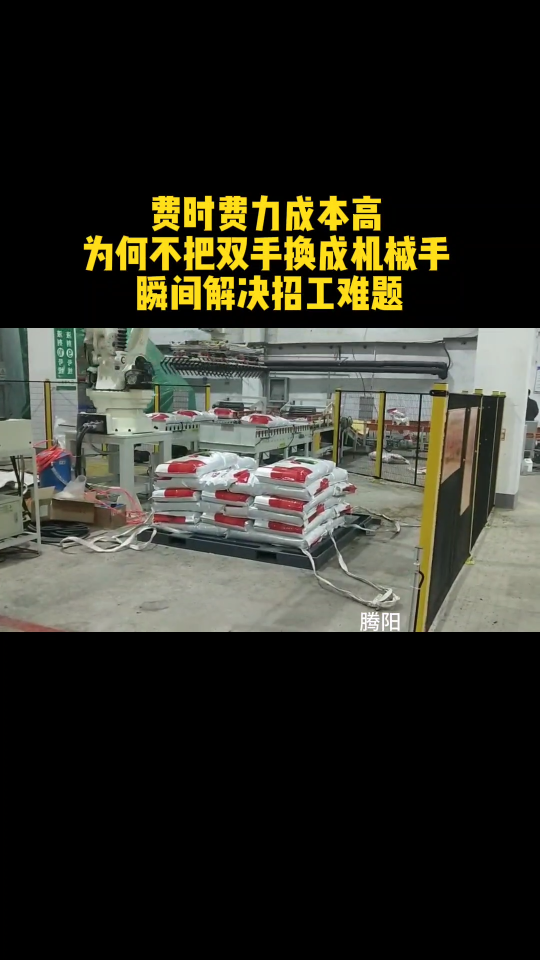
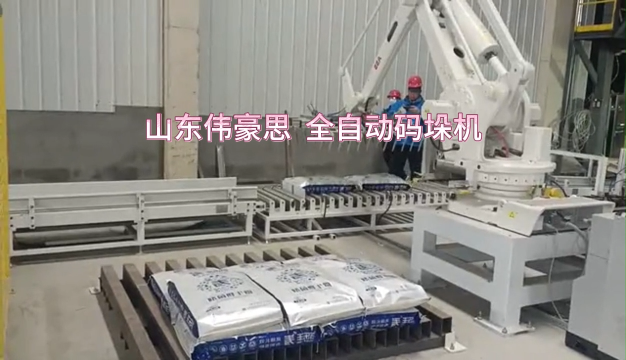
在自动化生产线中,由于不同产品采取的码垛方式和要求有差异,随着自动化程度地不断提升,对产品的码垛搬运程度也在不断加强,物料的运动要求也在不断增加。在实际工作过程中,大部分码垛机械抓手只能实现一种类型工件的抓取,无法满足高校地自动化生产。为了提高物料搬运效率,降低机械手开发成本,亟需一种复合型多功能抓手装置。由埃斯顿生产研发的复合型抓手码垛机器人,近日在建材行业粉状袋装物料码垛作业中得到很好的应用,下面腾阳苏简单介绍一下复合型抓手的特点和应用优势:
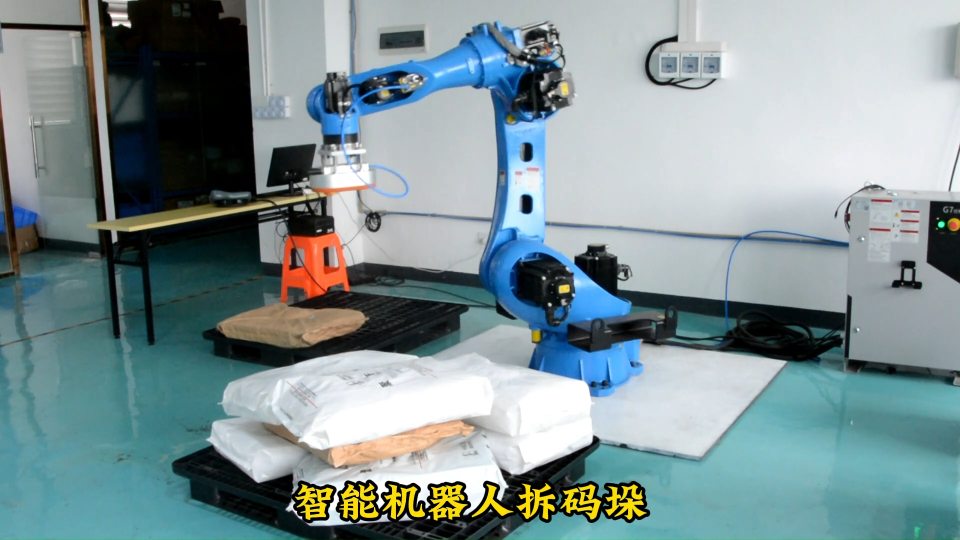
1.复合型抓手装置包括模组连接组件,模组连接组件的底部设置有抓手组件,模组连接组件上还设置有固定支架,固定支架用于与模组机械手连接,抓手组件的底部设有吸盘组件;模组连接组件的上端设有电机,电机的输出轴竖向设置且能驱动抓手组件转动。
3.吸盘组件包括吸盘底座,吸盘底座上设有至少一个吸盘。
4.吸盘底座下部靠近外侧设有四个互相对称设置的吸盘。
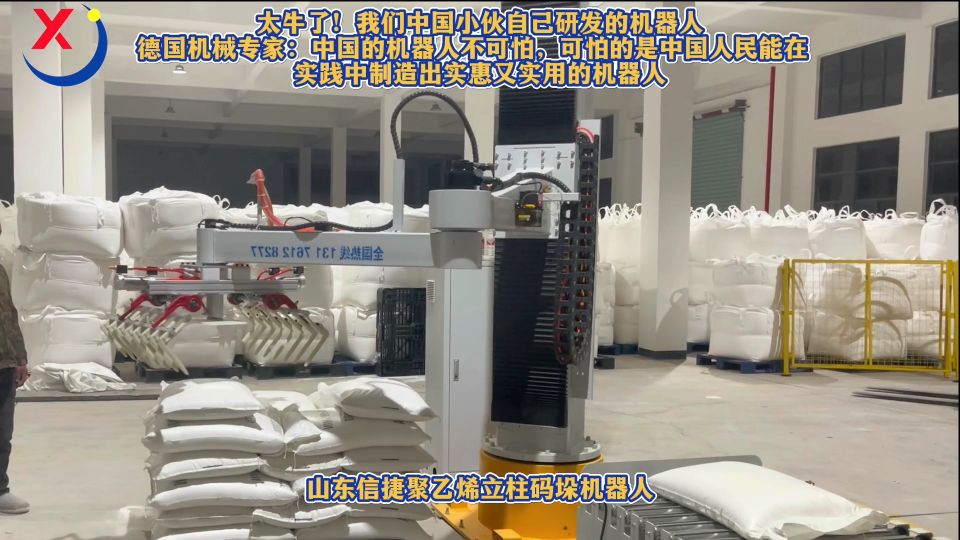
5.有效提高了机械臂的适用范围和稳定性
6.能够加强对装夹产品的固定强度,进一步提高机械臂的稳定性.
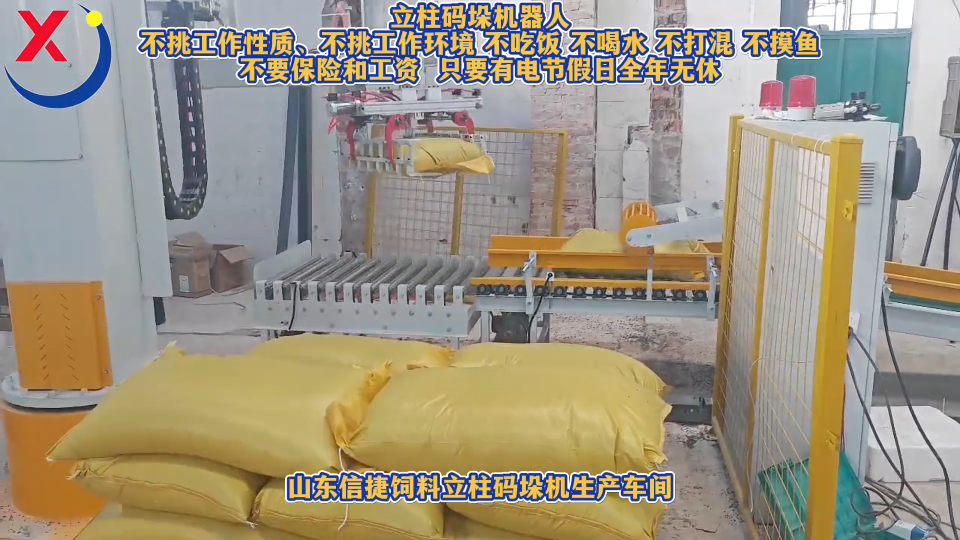
7.在袋装物料码垛一般用于软托盘,使用吸盘抓手抓取软拖盘放置于输送线,再用夹爪式抓手抓取袋子放置于软拖上,抓取过程更加准确灵敏柔性。
8.提高机械臂使用范围,适用于更多更广泛生产线作业。
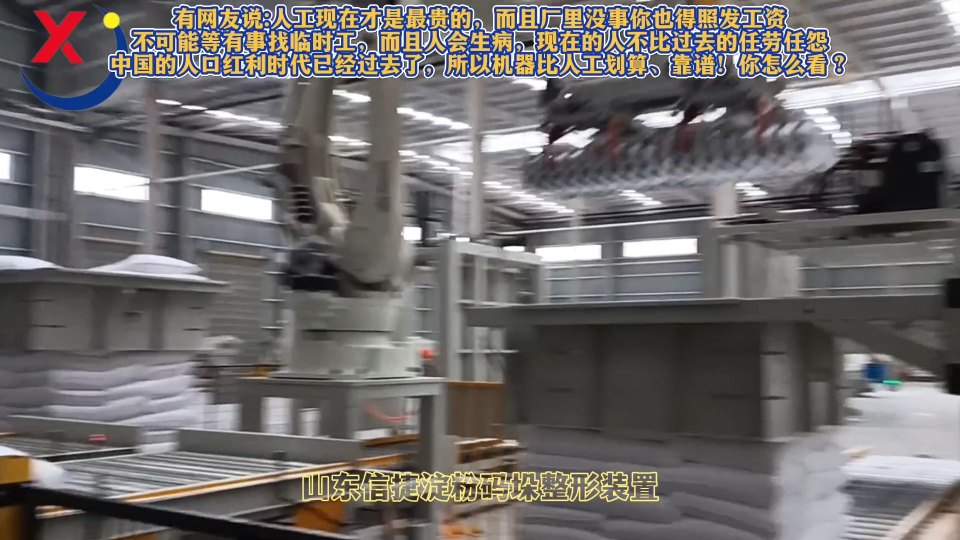
如今,我国正处在从传统工业向现代职能化、数字化的工业的转型期,在工业机器人市场中,未来我国还将有着巨大的需求量,埃斯顿的未来发展很值得期待。
随着工业自动化技术的不断突破,智能制造要求的不断提高,工业机器人已经在众多领域焕发光彩,下一步,腾阳将继续探索和研发,让工业自动化设备发挥其作用,赋能产业升级。
ymf














































































 工商网监
工商网监
评论