ADPA7002CHIP功率放大器:特性、应用与设计要点 在微波和毫米波应用领域,功率放大器是至关重要的组件。今天我们来深入探讨ADPA7002CHIP这款GaAs、pHEMT、MMIC功率放大器
2026-01-05 14:50:02 19
19 探索HMC - C020宽带功率放大器模块:特性、应用与设计要点 在微波和射频领域,功率放大器是至关重要的组件,其性能直接影响到整个系统的表现。今天我们来详细探讨一下Analog Devices公司
2025-12-31 11:35:06201 探索HMC - C021宽带功率放大器模块:特性、规格与应用 在电子工程领域,宽带功率放大器是众多应用中的关键组件。今天,我们来深入了解ANALOG DEVICES的HMC - C021宽带
2025-12-31 11:35:02201 功率放大器在电磁测试领域的研究中扮演着至关重要且不可或缺的角色。它的核心价值在于将测试信号进行放大,为各种电磁测试场景提供高强度、高保真、可控的电磁环境。 简单来说,功率放大器就像是电磁测试系统
2025-12-30 10:47:2052 
高压功率放大器在ESR(等效串联电阻)测试中发挥着至关重要的作用。以下是其具体应用和助力方式: 1.提供高功率信号 在测试大容量电容或高电压电容时,需要高功率信号来驱动电容。高压功率放大器能够将信号
2025-12-30 10:38:5539 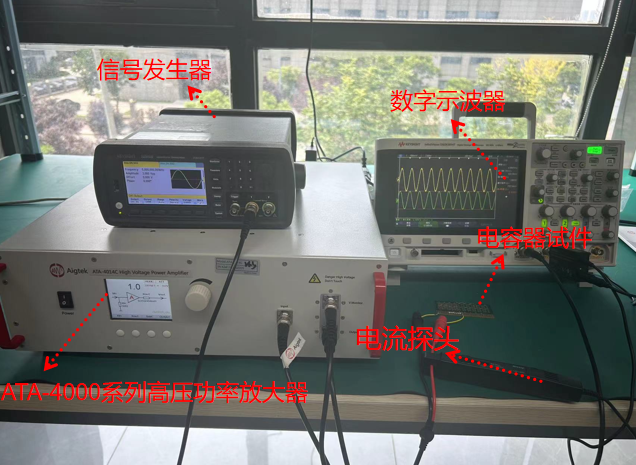
与控制IC,看看它有哪些独特的特性和应用场景。 文件下载: Infineon Technologies 偏置和控制IC功率放大器.pdf 一、BGMC1210概述 BGMC1210是一款专门为
2025-12-19 17:05:06431 ,获得了国内外一众工程师、科研人员的青睐。在新的一年,为了让身处各研究领域的您用上更好的功放产品,亲爱的Aigtek功率放大器使用人,您的声音,对我们至关重要!亲爱的客
2025-12-18 18:31:59156 
实验名称: 射频功率放大器在超声换能器声场特性校准规范中的应用 前言: JJF1650-2017规定了用于超声无损检测的超声换能器辐射声场的计量特性,校准条件和校准方法,该计量规范适用于频率在
2025-12-15 12:02:03192 
在功率放大器驱动负载的应用中,耗散功率评估是负载在任意工况下工作都在安全区的关键。这里讨论的是线性功率放大器,其输出正弦波的理论极限转换效率只有70%。耗散功率分析和估算有以下步骤:负载需求分析
2025-12-03 13:33:34287 
音频功率放大器是一种将低功率音频信号放大至足以驱动扬声器的电子设备。音频功率放大器作为现代音频系统的核心部件,其性能直接影响声音质量与设备能效。音频功率放大器与传统AB类放大器相比,现代D类音频放大器采用开关放大技术,具有更高效率和更低热损耗,特别适合电池供电的便携设备和空间受限的应用场景。
2025-11-14 15:50:58334 电子发烧友网为你提供()2000 至 2300 MHz 宽瞬时带宽高效功率放大器相关产品参数、数据手册,更有2000 至 2300 MHz 宽瞬时带宽高效功率放大器的引脚图、接线图、封装手册、中文
2025-10-24 18:31:31

电子发烧友网为你提供()4400 至 5000 MHz 宽瞬时带宽高效功率放大器相关产品参数、数据手册,更有4400 至 5000 MHz 宽瞬时带宽高效功率放大器的引脚图、接线图、封装手册、中文
2025-10-24 18:30:58
电子发烧友网为你提供()1800 至 1900 MHz 宽瞬时带宽高效功率放大器相关产品参数、数据手册,更有1800 至 1900 MHz 宽瞬时带宽高效功率放大器的引脚图、接线图、封装手册、中文
2025-10-24 18:30:00
电子发烧友网为你提供()3400 至 3600 MHz 宽瞬时带宽高效功率放大器相关产品参数、数据手册,更有3400 至 3600 MHz 宽瞬时带宽高效功率放大器的引脚图、接线图、封装手册、中文
2025-10-22 18:33:58
电子发烧友网为你提供()2300 至 2400 MHz 宽瞬时带宽高效功率放大器相关产品参数、数据手册,更有2300 至 2400 MHz 宽瞬时带宽高效功率放大器的引脚图、接线图、封装手册、中文
2025-10-22 18:31:16
电子发烧友网为你提供()用于汽车应用的功率放大器模块 – 四频 GSM / GPRS / EDGE相关产品参数、数据手册,更有用于汽车应用的功率放大器模块 – 四频 GSM / GPRS
2025-10-20 18:33:13
电子发烧友网为你提供()3300 至 3600 MHz 宽瞬时带宽高效功率放大器相关产品参数、数据手册,更有3300 至 3600 MHz 宽瞬时带宽高效功率放大器的引脚图、接线图、封装手册、中文
2025-10-17 18:35:15
电子发烧友网为你提供()1900 至 2000 MHz 高效 4 W 功率放大器相关产品参数、数据手册,更有1900 至 2000 MHz 高效 4 W 功率放大器的引脚图、接线图、封装手册、中文
2025-10-13 18:32:41
电子发烧友网为你提供()700 至 800 MHz 高效 4 W 功率放大器相关产品参数、数据手册,更有700 至 800 MHz 高效 4 W 功率放大器的引脚图、接线图、封装手册、中文资料、英文
2025-10-13 18:31:20
功率放大器测试解决方案分享——光纤水听器动态压力测试
2025-10-10 18:34:05378 
电子发烧友网为你提供()2300 至 2400 MHz 高效 4 W 功率放大器相关产品参数、数据手册,更有2300 至 2400 MHz 高效 4 W 功率放大器的引脚图、接线图、封装手册、中文
2025-10-10 18:31:08
电子发烧友网为你提供()900-990 MHz、19 dBm 线性功率放大器相关产品参数、数据手册,更有900-990 MHz、19 dBm 线性功率放大器的引脚图、接线图、封装手册、中文资料、英文
2025-09-23 18:31:44
电子发烧友网为你提供()2.4 – 2.5 GHz WLAN 功率放大器模块相关产品参数、数据手册,更有2.4 – 2.5 GHz WLAN 功率放大器模块的引脚图、接线图、封装手册、中文资料、英文
2025-09-19 18:33:07
电子发烧友网为你提供()1930 – 2170 MHz,0.5 W 功率放大器相关产品参数、数据手册,更有1930 – 2170 MHz,0.5 W 功率放大器的引脚图、接线图、封装手册、中文资料
2025-09-19 18:32:44
电子发烧友网为你提供()WLAN 功率放大器模块相关产品参数、数据手册,更有WLAN 功率放大器模块的引脚图、接线图、封装手册、中文资料、英文资料,WLAN 功率放大器模块真值表,WLAN 功率放大器模块管脚等资料,希望可以帮助到广大的电子工程师们。
2025-09-19 18:30:51
电子发烧友网为你提供()2.4 GHz、256 QAM 功率放大器相关产品参数、数据手册,更有2.4 GHz、256 QAM 功率放大器的引脚图、接线图、封装手册、中文资料、英文资料,2.4 GHz
2025-09-17 18:32:58
电子发烧友网为你提供()2.4 GHz 功率放大器相关产品参数、数据手册,更有2.4 GHz 功率放大器的引脚图、接线图、封装手册、中文资料、英文资料,2.4 GHz 功率放大器真值表,2.4 GHz 功率放大器管脚等资料,希望可以帮助到广大的电子工程师们。
2025-09-16 18:31:36
电子发烧友网为你提供()用于 CDMA 的功率放大器模块相关产品参数、数据手册,更有用于 CDMA 的功率放大器模块的引脚图、接线图、封装手册、中文资料、英文资料,用于 CDMA 的功率放大器模块真值表,用于 CDMA 的功率放大器模块管脚等资料,希望可以帮助到广大的电子工程师们。
2025-09-16 18:29:59
电子发烧友网为你提供()2.01 - 2.025 GHz 小基站功率放大器模块相关产品参数、数据手册,更有2.01 - 2.025 GHz 小基站功率放大器模块的引脚图、接线图、封装手册、中文资料
2025-09-15 18:35:12
电子发烧友网为你提供()2.545 至 2.69 GHz 小蜂窝功率放大器模块相关产品参数、数据手册,更有2.545 至 2.69 GHz 小蜂窝功率放大器模块的引脚图、接线图、封装手册、中文资料
2025-09-15 18:33:38
电子发烧友网为你提供()用于 CDMA 的功率放大器模块 (824 MHz-849 MHz)相关产品参数、数据手册,更有用于 CDMA 的功率放大器模块 (824 MHz-849 MHz)的引脚图
2025-09-11 18:29:59
电子发烧友网为你提供()860 – 960 MHz,0.5 W 高功率功率放大器相关产品参数、数据手册,更有860 – 960 MHz,0.5 W 高功率功率放大器的引脚图、接线图、封装手册、中文
2025-09-04 18:29:59
电子发烧友网为你提供()2110 - 2170 MHz 高线性度 2 W 功率放大器相关产品参数、数据手册,更有2110 - 2170 MHz 高线性度 2 W 功率放大器的引脚图、接线图、封装手册
2025-09-03 18:34:07
电子发烧友网为你提供()双频 802.11a/b/g/n 无线 LAN 功率放大器相关产品参数、数据手册,更有双频 802.11a/b/g/n 无线 LAN 功率放大器的引脚图、接线图、封装手册
2025-09-03 18:30:00
电子发烧友网为你提供()791 - 821 MHz 小型蜂窝功率放大器模块相关产品参数、数据手册,更有791 - 821 MHz 小型蜂窝功率放大器模块的引脚图、接线图、封装手册、中文资料、英文资料
2025-09-02 18:32:06
电子发烧友网为你提供()925 - 960 MHz 小蜂窝功率放大器模块相关产品参数、数据手册,更有925 - 960 MHz 小蜂窝功率放大器模块的引脚图、接线图、封装手册、中文资料、英文资料
2025-09-02 18:31:38
电子发烧友网为你提供()用于 CDMA2000 (450–460 MHz) 的功率放大器模块相关产品参数、数据手册,更有用于 CDMA2000 (450–460 MHz) 的功率放大器模块的引脚图
2025-08-25 18:33:13
电子发烧友网为你提供()1805 至 1880 MHz 线性功率放大器相关产品参数、数据手册,更有1805 至 1880 MHz 线性功率放大器的引脚图、接线图、封装手册、中文资料、英文资料
2025-08-20 18:34:27
功率放大器是科研院所的“万能电源”,它能放大信号又不让波形走样,于是各学科都把最“耗电”的实验交给了它。以下从五个热门方向,梳理当前研究所用功率放大器正在开展的典型实验场景,并穿插实际案例,方便
2025-07-21 17:44:49470 
过程的稳定性和精确性。 图:功率放大器基于纳米光纤的光学谐振腔研究中的应用 一、功率放大器在光纤拉伸中的作用 (一)精确控制拉伸力 功率放大器能够根据拉伸工艺的要求,精确控制施加在光纤上的拉力。通过调节功率放大
2025-07-03 15:03:56522 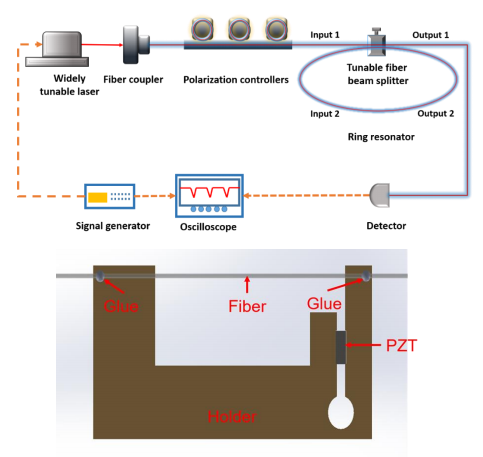
电子发烧友网为你提供()带功率检测器的 2.4 GHz 功率放大器相关产品参数、数据手册,更有带功率检测器的 2.4 GHz 功率放大器的引脚图、接线图、封装手册、中文资料、英文资料,带功率检测器
2025-07-01 18:29:59
电子发烧友网为你提供()2.4 GHz 高功率无线 LAN 功率放大器相关产品参数、数据手册,更有2.4 GHz 高功率无线 LAN 功率放大器的引脚图、接线图、封装手册、中文资料、英文资料,2.4
2025-06-30 18:36:05
电子发烧友网为你提供()带功率检测器的 5 GHz 功率放大器相关产品参数、数据手册,更有带功率检测器的 5 GHz 功率放大器的引脚图、接线图、封装手册、中文资料、英文资料,带功率检测器的 5
2025-06-30 18:35:28
海洋勘探是指对海洋进行系统的调查和研究,以了解海洋的物理、化学、生物和地质特性。它对于海洋资源开发、海洋科学研究以及海洋环境保护具有重要意义。水声功率放大器作为一种关键的电子设备,在海洋勘探中发
2025-06-23 14:48:10470 
发光二极管(LED)因高效、节能、长寿命等优点,在照明、显示及医疗等领域应用广泛。随着技术发展,对LED性能的要求日益提高,功率放大器在LED发光研究中发挥着重要作用,为性能提升和应用拓展提供了有力
2025-06-20 15:54:57633 
功率放大器作为电子测试系统中的关键设备,能够将低功率信号放大至所需的高功率水平,为各类前沿科技研发和工业测试提供强大的驱动能力。其在多个领域的创新试验中发挥着不可替代的作用,以下是几类代表性的应用场景。
2025-06-18 14:03:38416 
系统中扮演着关键角色,它为激振器提供所需的高功率和高精度的驱动信号,以确保激振器能够稳定、准确地输出所需的振动特性。 图:ATA-3000系列功率放大器在基于直流有刷电机驱动的扭矩激振器研究中的应用 一、功率放大器驱动
2025-06-16 17:33:36701 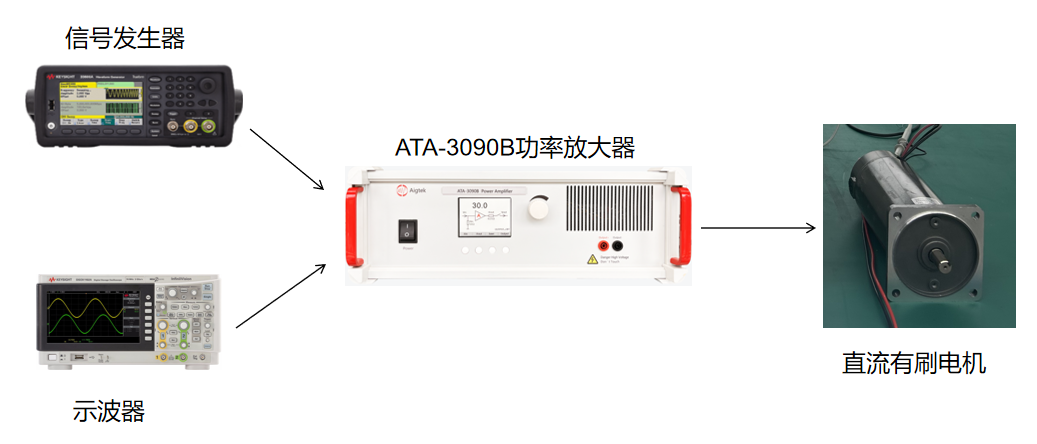
是应用于工业生产、医疗设备、科研实验还是其他领域。例如,在工业自动化生产线中,可能需要长时间稳定运行且抗干扰能力强的功率放大器;而在医疗设备中,则对放大器的安全性、可靠性和精度要求极高。 信号特性:分析输入信号的
2025-06-10 17:40:59708 
帮助。 案例一:ATA-308功率放大器在压电驱动器输出力迟滞效应研究中的应用 该实验使用了ATA-308功率放大器、压电驱动器、上位机、数据采集卡、力传感器等设备。 实验概要: 针对压电驱动器输出力的动态迟滞现象,研究固定频率下的输出力建模方法以
2025-05-28 11:23:25559 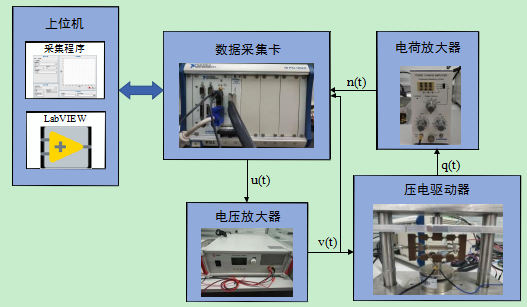
功率放大器的应用案例合集,希望能对领域内各位工程师、研究人员有所帮助。 案例一:功率放大器在电动汽车动态无线电能传输研究中的应用 该实验使用了信号发生器、ATA-3040功率放大器、发射线圈、接收线圈、整流桥、DC/DC及负载电阻、示波器、LCR阻抗分析仪、
2025-05-26 11:54:56478 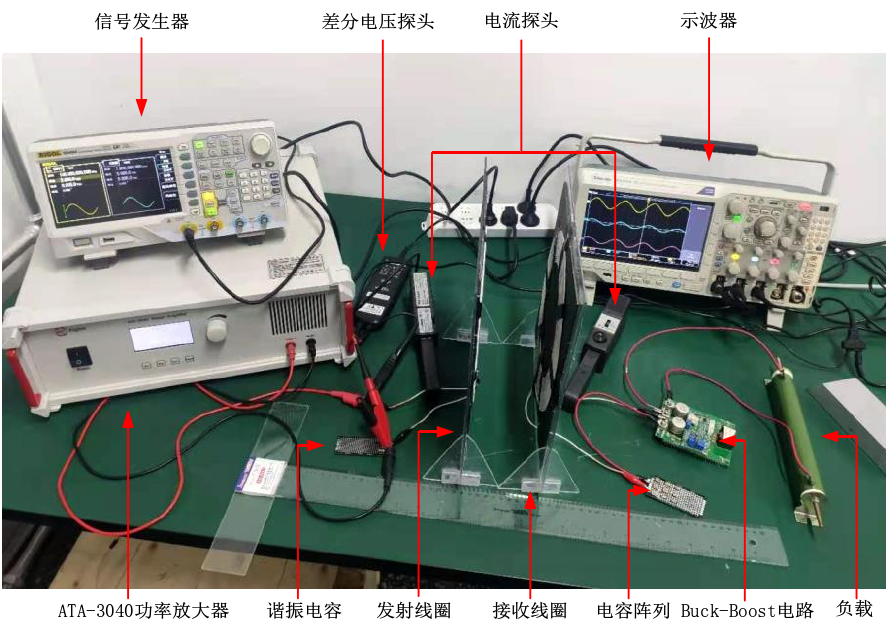
高压功率放大器 在驱动电机方面有着广泛的应用场景。下面将介绍高压功率放大器驱动电机的应用场景及其重要性。 高压功率放大器是一种电子设备,用于将低电压信号放大到足以驱动电机的高电压水平。它通常由
2025-05-19 11:36:28711 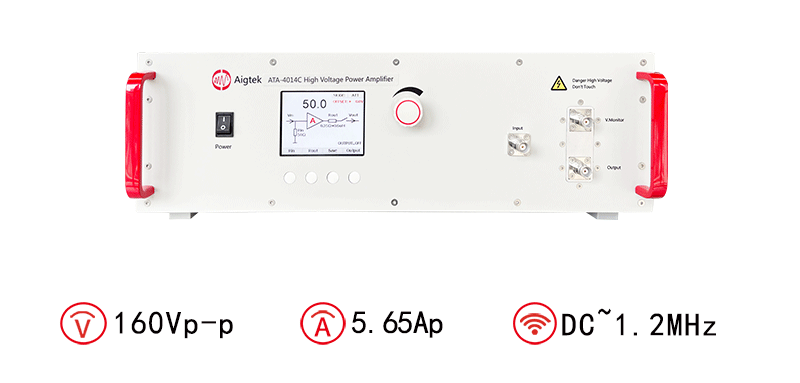
电子发烧友网为你提供()3300 至 3800 MHz 宽瞬时带宽高效功率放大器相关产品参数、数据手册,更有3300 至 3800 MHz 宽瞬时带宽高效功率放大器的引脚图、接线图、封装手册、中文
2025-05-14 18:30:42
高压功率放大器是一种重要的电子设备,在各种领域都有广泛的应用。它们能够将低电压信号放大到高电压,并且能够提供足够的功率以驱动各种负载。以下是高压功率放大器的一些主要应用场景: 1.音频放大器: 高压
2025-05-14 11:27:29658 
电子发烧友网为你提供()2300 至 2690 MHz 宽瞬时带宽高效功率放大器相关产品参数、数据手册,更有2300 至 2690 MHz 宽瞬时带宽高效功率放大器的引脚图、接线图、封装手册、中文
2025-05-13 18:33:35
电子发烧友网为你提供()3450 至 4200 MHz 宽瞬时带宽高效功率放大器相关产品参数、数据手册,更有3450 至 4200 MHz 宽瞬时带宽高效功率放大器的引脚图、接线图、封装手册、中文
2025-05-13 18:31:27
着重要的应用。选择适合的高压功率放大器需要全面考虑实际需求和性能指标,以确保系统的稳定性和可靠性。 选择高压功率放大器需要了解具体的应用需求。例如,需要考虑输出电压范围、输出功率、频率响应范围、负载特性、控制接口
2025-05-13 11:45:45476 
在现代电子系统中, 高压功率放大器 扮演着至关重要的角色,用于放大和控制高压电信号,例如用于医疗成像设备、工业机器人、通信系统和能源转换器等领域。以下是一些使用高压功率放大器时的技巧和注意事项
2025-05-12 14:08:42515 电子发烧友网为你提供()LMH ENDC 多模/多频段功率放大器模块相关产品参数、数据手册,更有LMH ENDC 多模/多频段功率放大器模块的引脚图、接线图、封装手册、中文资料、英文资料,LMH
2025-05-08 18:32:15
高压功率放大器 是一种电子设备,用于放大电信号的幅度,同时提供足够的电压来驱动其他高压负载或设备。下面西安安泰将详细介绍高压功率放大器的原理、特点和应用。 高压功率放大器的工作原理基于基本的电子
2025-04-28 11:21:13651 
功率放大器是一种电子设备,主要用于将输入信号的功率放大到输出端所需水平。它广泛应用于音频放大、射频放大、通讯、医疗等领域。下面西安安泰将详细介绍功率放大器的用途和作用。 音频放大 在音响系统中
2025-04-21 11:08:301108 
射频功率放大器(RF PA)是无线通信系统的核心组件,其工作原理基于能量转换与信号放大技术。射频功率放大器通过精准的能量控制与信号处理,成为无线系统实现高效、可靠传输的核心部件,其技术
2025-04-21 09:48:541945 高频功率放大器实验在电子学和通信领域中起着关键的作用。下面西安安泰来为大家详细介绍高频功率放大器实验的几个重要作用。 验证理论与设计:高频功率放大器实验可以用来验证和评估理论模型和设计方案的正确性
2025-04-17 11:11:22599 
高功率放大器是一种专门用于将输入信号的功率放大到较高水平的电子设备。它在许多应用领域中发挥着重要作用。下面西安安泰将详细介绍高功率放大器的作用和意义。 高功率放大器的主要作用是将输入信号的功率放大到
2025-04-14 11:24:08608 电子发烧友网为你提供()用于 ENDC 应用的 NR 功率放大器模块相关产品参数、数据手册,更有用于 ENDC 应用的 NR 功率放大器模块的引脚图、接线图、封装手册、中文资料、英文资料,用于
2025-04-11 18:33:40
功率放大器是一种能够将低功率信号放大到高功率水平的电子器件。它在各个领域中广泛应用,如音频放大、射频通信、工业控制等。下面西安安泰将详细阐述功率放大器的工作原理、分类及其特点。 功率放大器的工作原理
2025-04-10 10:27:03899 
功率放大器是一种电子设备,用于将输入的弱信号放大成为输出的高功率信号。根据不同的工作原理和应用场景,功率放大器可以分为多种类型。下面将介绍几种常见的功率放大器类型及其特点。 1.A类功率放大器: A
2025-04-08 10:17:02991 功率放大器是一种电子设备,用于将低功率的输入信号放大到高功率的输出信号。它在各种领域中都有广泛的应用,包括音频放大、通信系统、无线电、雷达等。为了确保功率放大器的性能和可靠性,它需要满足一些基本要求
2025-04-03 10:21:33819 
功率放大器是将输入信号放大到较高功率输出的重要设备。在选择功率放大器时,需要考虑多个因素,以确保所购买的设备能够满足实际需求。下面西安安泰将介绍一些功率放大器的关键问题和注意事项,帮助大家在
2025-04-01 11:12:21530 功率放大器是电子电路中常见的一种设备,用于将输入信号的功率放大到更高的水平。根据不同的工作原理和应用场景,可以将功率放大器分为几种不同的类型。下面西安安泰将会介绍几种常见的功率放大器类型以及它们各自
2025-03-24 11:00:16970 功率放大器是电子设备中的重要组件,广泛应用于各个领域,如音频放大、通信系统、无线电频率发射等。它的作用是将输入信号的能量放大到所需的输出电平,以实现信号的扩大和增强。下面将介绍功率放大器的特点和作用
2025-03-24 10:49:361004 功率放大器是一种常见的电子电路,主要用于将输入信号的功率放大到更高的水平。它在现代电子设备和系统中起着重要的作用,具有多种应用和功能。 功率放大器的工作原理基于两个关键概念:功率和放大。功率是描述
2025-03-20 11:47:08960 功率放大器是一种用于增加信号功率的电子设备,常见于无线通信、音频设备、广播电视等领域。根据工作原理、电路拓扑和应用领域的不同,功率放大器可以分为多种类型。下面西安安泰来介绍常见的几类功率放大器。 A
2025-03-20 11:07:15792 功率放大器的转换效率是指功率放大器将输入功率转换为输出功率的效率。在功率放大器中,输入功率是指供给放大器的电源功率,而输出功率是指从放大器输出的信号功率。转换效率是衡量功率放大器性能的重要指标之一
2025-03-19 10:48:531045 
功率放大器是一种重要的电子设备,其主要功能是将输入信号的功率增加到足够高的水平,以便推动负载或驱动输出设备。功率放大器在各个领域中都具有广泛的应用,例如音频系统、射频通信、雷达、无线电等。下面安泰
2025-03-19 10:40:08634 
超声功率放大器是一种用于放大超声信号的设备,广泛应用于医疗、工业和科学研究领域。它能够将低功率的输入信号放大到较高的功率级别,以满足不同应用对超声能量的需求。下面将介绍一些常见的超声功率放大器的技术
2025-03-17 11:25:04774 
系列产品在院校科研中的应用。 随着科技的发展,众多高校日益注重科学研究的推进与应用,功率放大器作为一种基础而重要的电子器件,在各个科研领域发挥着重要作用。从微小信号放大到大功率输出,它为科研人员提供了稳定可靠
2025-03-14 11:10:36548 
。通过使用功率放大器,可以将光源的亮度增强到适合实验或观测所需的水平。这对于需要高亮度的实验和显微观察非常重要。 功率放大器还可以用于增强荧光信号。在光学显微镜中,荧光标记常用于研究细胞、分子和组织的特定结构或
2025-03-12 11:34:57430 功率放大器是电子设备中常见的一种器件,其主要作用是将弱信号放大为较大的功率信号。它在各种领域中都扮演着重要的角色,包括音频系统、通信设备、无线电传输以及工业自动化等。本文将详细介绍功率放大器放大
2025-03-11 10:52:38812 高频功率放大器是一种专用于放大高频信号的设备,它在现代电子通信、无线传输、雷达系统、卫星通信和医疗领域等方面发挥着重要的作用。在本文中,我们将详细介绍高频功率放大器的作用和用途。 高频功率放大器
2025-03-07 11:07:57931 功率放大器测试解决方案分享——电致发光纤维特性研究
2025-03-06 18:46:54866 
功率放大器是电子设备中的重要组成部分,它的作用是将输入信号的功率放大到更高的水平。根据不同的分类依据,功率放大器可以分为多种不同类型。下面西安安泰Aigtek将详细介绍功率放大器的分类依据和种类
2025-03-05 10:51:26812 功率放大器是一种电子设备,主要用于将输入信号的功率放大到更高的功率级别。它在不同领域中具有广泛的应用和重要作用。下面将介绍功率放大器的作用与用途,并深入探讨它在各个领域中的重要性。 功率放大器在通信
2025-02-25 11:37:08812 CERNEX窄带高功率放大器(GaN)
CERNEX推出的CNP GaN系列窄带高功率放大器专为多种通用应用场景而设计,涵盖实验室测试设备、仪器仪表及高功率输出需求的其他领域。CNP GaN系列窄带
2025-02-21 10:39:06
功率放大器是一种用于增强电信号的设备,它在各种电子系统中广泛应用,如音频放大器、射频放大器和功率放大器等。为了保证功率放大器能够正常工作并满足设计要求,有以下几个主要要求。 功率放大器需要具有高功率
2025-02-20 11:06:29926 随着电动汽车的普及和发展,无线电能传输成为了一种方便快捷的充电方式。而 功率放大器 在充电汽车无线电能传输中扮演着重要的角色。本文将讨论功率放大器在充电汽车无线电能传输中的具体应用。 首先,我们来了
2025-02-18 13:55:22819 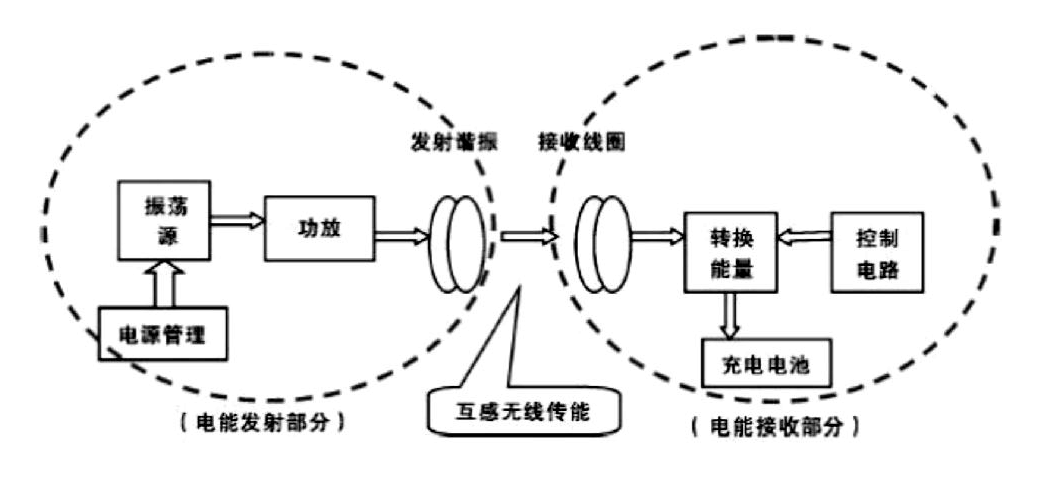
常用于超声声学、电磁驱动、水下通信、材料测试、压电驱动等各领域研究当中。不同类型的波形信号要求不同的功率放大器来进行放大处理。 首先,正弦波是最简单、最基本的波形信号之一。正弦波具有高度可预测性和周期性,是电
2025-02-09 15:43:461029 
乙类推挽功率放大器是一种高效且常用的功率放大电路,它通过在正半周期和负半周期分别使用两个特性相同的晶体管,来实现对输入信号的完整放大。本文将从工作原理、电路结构、参数计算、优缺点等方面对乙类推挽功率放大器进行详细的分析和阐述。
2025-02-03 17:26:001891 
几个方面: 提高声音质量 :功率放大器能够放大音频信号的功率,使得扬声器能够产生更清晰、更有力的声音。这对于音乐播放、现场演出等场合尤为重要,能够确保听众获得更好的听觉体验。 增强声音动态范围 :动态范围是音频信
2025-02-01 14:44:001549 一、功率放大器的工作原理解析 功率放大器是一种电子设备,其主要功能是将输入信号放大到足够大的功率水平,以驱动负载。以下是功率放大器工作原理的介绍: 输入信号的处理 : 输入信号首先通过功率放大器
2025-02-01 10:53:003123 功率放大器是一种用于将输入信号的功率放大到更高功率水平的电子设备。在电机控制系统中,功率放大器扮演着重要的角色,用于提供足够的电流和电压来驱动电机。 电机是将电能转换为机械能的设备,它根据输入信号
2025-01-22 10:39:011001 功率放大器在声学领域有广泛的应用场合。从音频系统到声学研究,功率放大器发挥着至关重要的作用。下面西安安泰将详细介绍功率放大器在声学领域中的一些主要应用场合。 音频测试:功率放大器在音频测试中也发挥
2025-01-21 11:04:19804 
在现代直播行业中,音响系统的质量直接影响着直播的质量和观众的观看体验。功率放大器作为音响系统中的核心设备,承担着将音频信号放大至扬声器所需的功率的重任。 功率放大器的基本原理 功率放大器的主要功能
2025-01-20 09:14:501396 在电子学和音响领域,功率放大器是将音频信号放大以驱动扬声器或其他负载的重要组件。功率放大器的性能直接影响到音质和系统的稳定性。频率响应特性是衡量功率放大器性能的关键指标之一,它描述了放大器对不同频率
2025-01-20 09:13:001437 在音频放大领域,数字功率放大器(D类放大器)和模拟放大器(A/B类放大器)是两种常见的技术。随着技术的发展,D类放大器因其高效率和小型化的优势而越来越受到关注。 一、工作原理 1.1 模拟放大器(A
2025-01-19 14:40:252154 功率放大器是电子设备中不可或缺的组成部分,它们将微弱的信号放大到足够的功率以驱动扬声器或其他负载。然而,功率放大器在放大信号的同时,也会产生大量的热量。如果这些热量不能有效地散发,可能会导致设备性能
2025-01-19 14:38:292058 的需求,蓝牙功率放大器成为了提升蓝牙性能的重要技术。 一、提高通信距离 蓝牙功率放大器最直接的优势是提高通信距离。传统的蓝牙模块在没有功率放大器的情况下,其通信距离通常受到限制。通过增加功率放大器,可以显著增加信
2025-01-19 14:36:401430 组件。它的主要任务是将来自音频源的微弱信号放大到足以驱动扬声器的功率水平。功放的设计和性能直接影响到音响系统的输出音质和动态范围。 功放的工作原理 功率放大器通过电子元件(如晶体管、电子管或集成电路)来放大输入的
2025-01-19 14:33:181556 苏州新利通 38701/A/B/C/D/E/F 固态功率放大器 频率范围覆盖 9kHz~110GHz 综述 387XX固态功率放大器系列分频段可实现9kHz~110GHz的频率范围内输入信号
2025-01-13 16:59:311010 
功率放大器是一种电子设备,它的主要作用是将弱信号放大到较大的功率级别,供给特定的负载使用。功率放大器的工作原理可以简单描述为信号接收、放大和输出三个步骤。 首先是信号接收。功率放大器通常通过输入端接
2025-01-08 10:13:13929 
在音响系统中,音质是衡量系统性能的重要指标。音质的好坏直接影响到音乐的还原度和听众的听觉体验。功率放大器作为音响系统中的核心部件之一,其性能对音质有着直接的影响。 一、功率放大器的基本原理
2025-01-06 15:13:403319
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论