 电子发烧友App
电子发烧友App


实验名称:功率放大器基于双曲函数的Preisach类迟滞非线性建模与逆控制
实验内容:
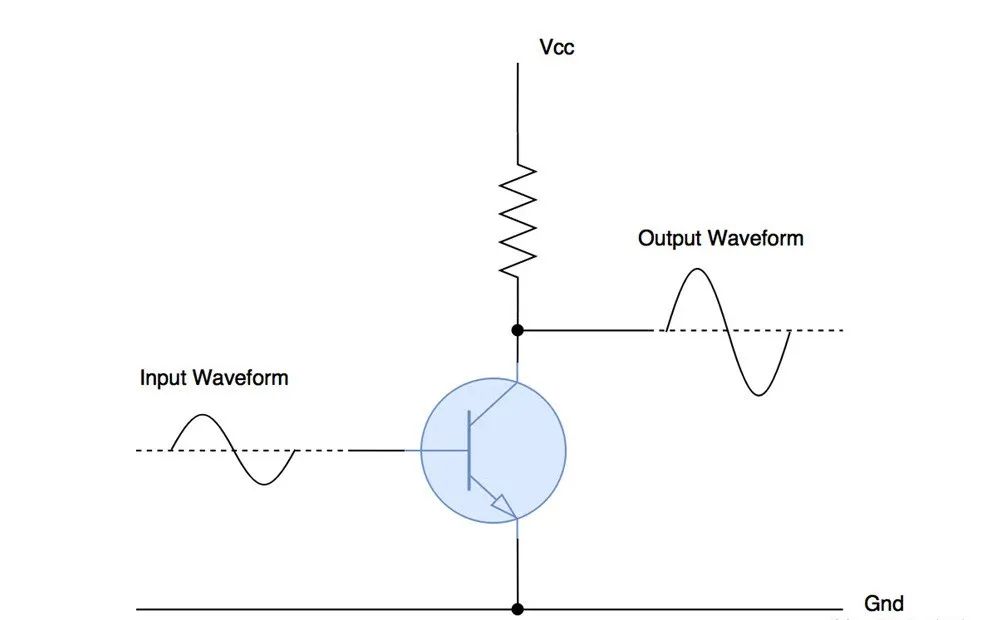
压电陶瓷、磁致伸缩等智能材料制备的驱动器件被广泛应用于精密定位领域,但这些智能材料,本身所固有的迟滞非线性严重制约了定位系统的控制精度,并由可能导致系统不稳定。为了减小迟滞非线性对系统的不利影响,通常采用基于迟滞模型的控制方法。
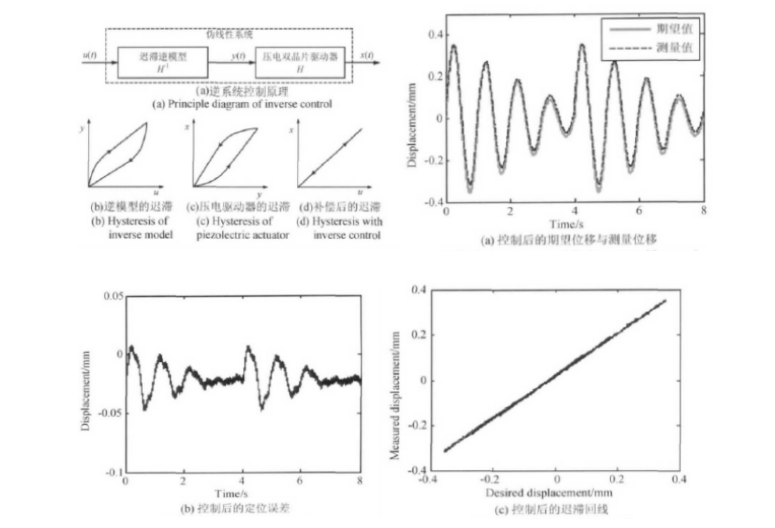
本文基于双曲函数描述Preisach类的迟滞非线性,分别采用2个双曲函数描述迟滞主环的上升段与下降段,并通过坐标变换拟合依附于主环的一阶曲线,然后根据Preisach模型的记忆擦除性与次环一致性原理,用一阶上升曲线描述次环的上升段,一阶下降曲线模拟次环的下降段。基于这种迟滞模型设计了逆控制器来补偿压电双晶片驱动器的迟滞非线性,提高了定位控制的精度。
实验过程:
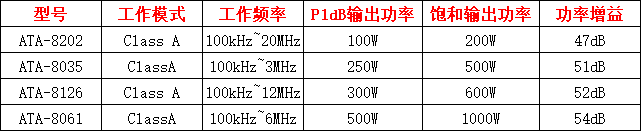
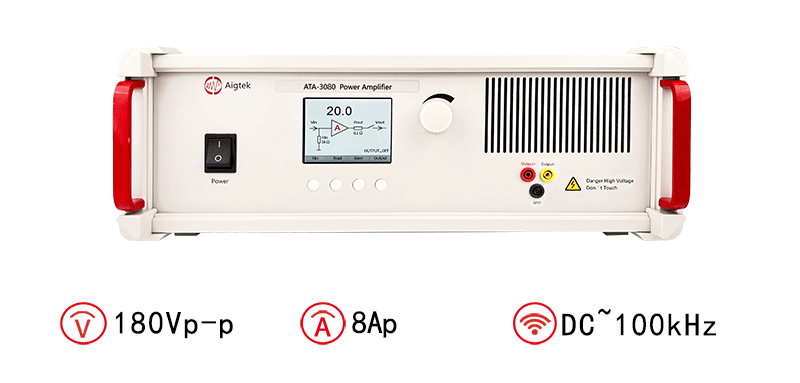
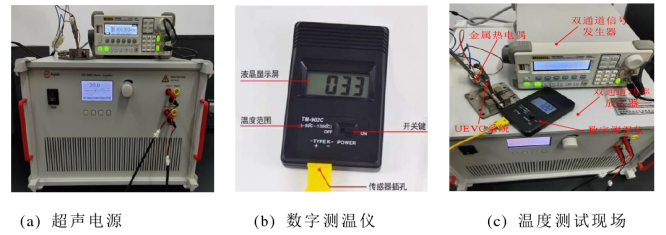
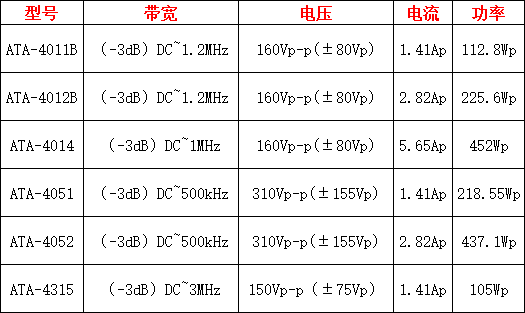
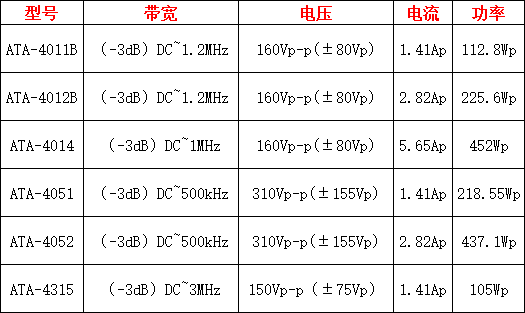
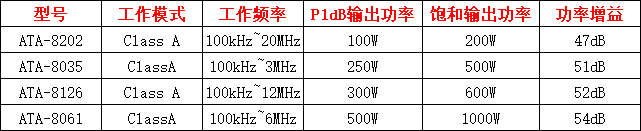
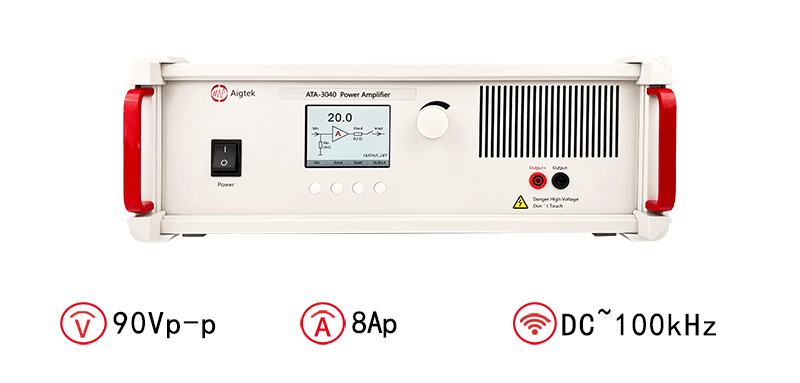
为了验证双曲函数模型的有效性,设计了逆控制器用于压电双晶片驱动器的精度定位系统,实验系统:装有dSPACE系统的计算机通过功率放大器将驱动电压作用在压电双晶片上,通过光纤位移传感器测量压电双晶片的位移,并将信号传回dSPACE板卡。为了比较控制效果并获得迟滞模型的辨识数据,测量了压电双晶片驱动器在频率为1Hz、50V峰值正弦信号作用下的响应。

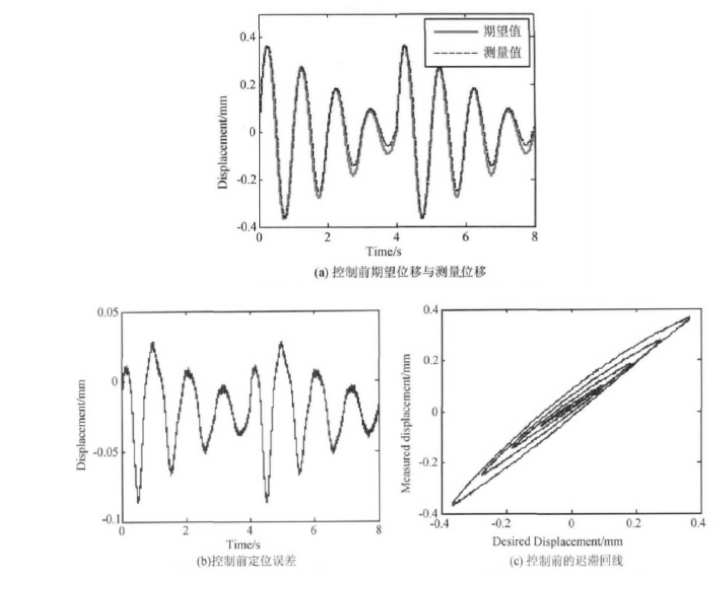
控制前:
为了同时测试迟滞主环与次环的控制结果,期望采用1Hz变幅值的正弦信号。
控制后:如果迟滞逆模型足够精确,将与压电双晶片驱动器的迟滞非线性相互抵消,使期望位移与响应位移线性化。
实验结果:
本文基于双曲函数描述Preisach类的迟滞非线性,分别采用2个双曲函数描述迟滞主环的上升段与下降段,并通过变换坐标拟合了依附于主环的一阶上升与下降曲线,然后根据记忆擦除性与次环一致性描述迟滞非线性的任意次环。这种建模方法所需的模型参数远小于经典的Preisach模型,而且参数识别容易,使用该模型的前提是双曲函数能够拟合迟滞非线性的主环,这适用于控制压电驱动器等智能材料的迟滞非线性。基于该迟滞模型设计了压电双晶片驱动器的逆控制器,使控制后的最大定位误差比控制前减小了44.26%,可有效抑制迟滞非线性引起的误差。
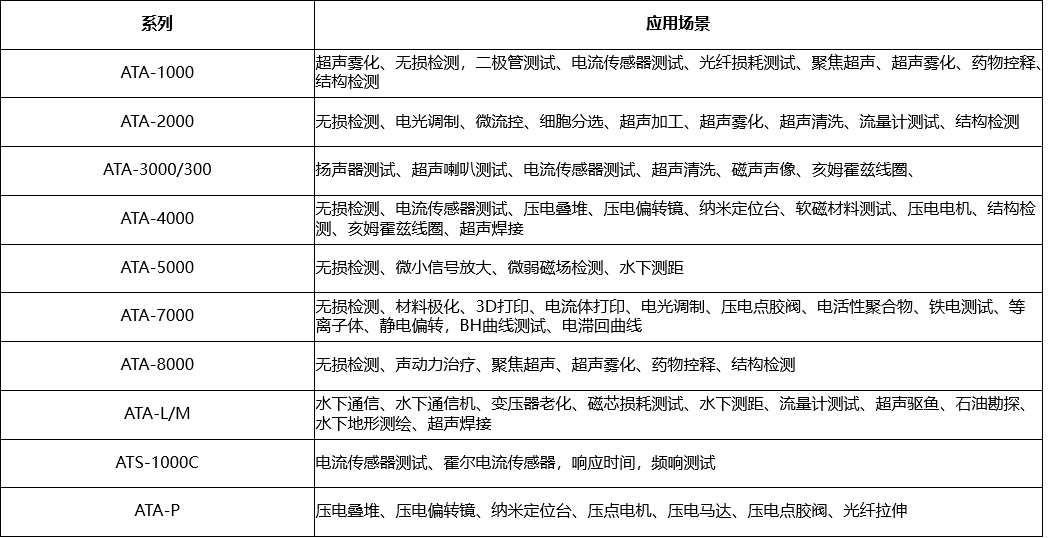
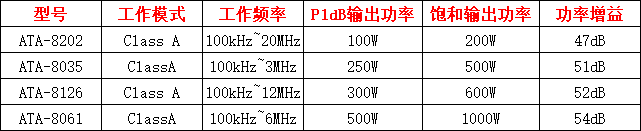
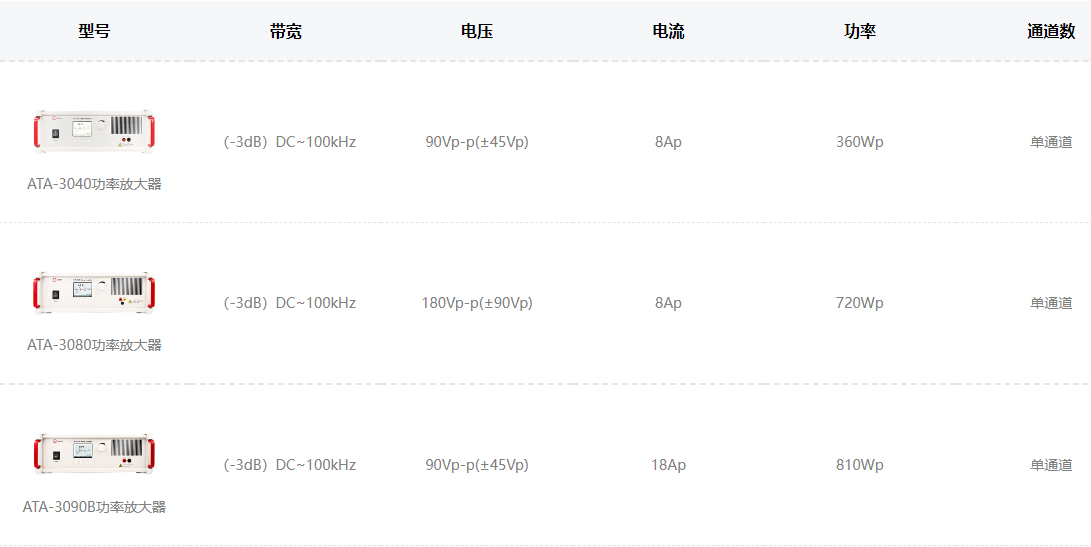
本文实验素材由西安安泰电子整理发布,如想了解更多实验方案,请持续关注安泰官网。Aigtek是国内专业从事测量仪器研发、生产和销售的高科技企业,一直专注于功率放大器、线束测试仪、计量校准源等测试仪器产品的研发与制造。
审核编辑:符乾江






















 工商网监
工商网监
评论