 电子发烧友App
电子发烧友App


在这篇评论的第一部分中,我展示了如何安装和设置操作系统。从那里,很容易按照“入门”示例之一来运行“Hello World”程序。在这里,我将介绍一些用于操作硬件资源以准备实际项目开发的选项。
MinnowBoard Turbot 的一大优点是可以使用的操作系统种类繁多。其中包括 Ubuntu (16.04.1 LTS),以及 Android 和 Windows (8.1/10/IoT Core)。我个人对开发目的的偏好通常是 Ubuntu。它的基本安装比 Windows 轻得多,但是,Ubuntu 提供了大量的软件包,可以很容易地通过网络下载然后安装。
更新升级
首先,我还应该指出,据我所知,本文中包含的定制材料是正确的。但是,我不做任何保证。对于您因使用本材料获得的知识和技能而造成的任何损害,我也不承担任何责任。
也就是说,让我们开始吧。
在使用任何操作系统时,最好始终保持软件最新。已安装的软件包可以通过网络自动更新,这是一个非常有用且有价值的功能,尤其是在涉及安全更新的情况下。当 MinnowBoard Turbot 正在运行并连接到网络时,它会偶尔检查更新并通知您安装它们。
但是,因为您可能不会像使用传统计算机那样始终保持 SBC 开启,所以您应该知道如何通过命令行界面手动更新系统。这将确保您可以使用最新的软件和安全补丁。
要在 Ubuntu 下手动更新 MinnowBoard,请导航用户界面以启动终端程序,方法是按 ALT-F1,然后按 Enter 启动“搜索您的计算机”应用程序。输入“终端”并按回车键启动终端应用程序。
终端启动后,使用以下命令更新操作系统(并随身携带密码):sudo apt-get -y update sudo apt-get -y dist-upgrade
要有耐心。第一次更新过程可能需要很长时间,具体取决于您的网络速度和需要安装的软件升级数量。更新最终完成后,通过执行命令sudo reboot 重新启动系统以确保您使用所有最新软件运行。
你好,眨眼!
现在操作系统是最新的,是时候开始学习如何操作板上的 IO 端口了。作为开始的地方,MinnowBoard Turbot 上有两个蓝色 LED,用于指示板的电源状态。系统运行后,您可以从操作系统控制第二个 LED (D2),并通过标准 GPIO 接口对其进行处理。
原则上,与 Linux GPIO 接口交互的最简单方法是通过文件系统,您可以在 MinnowBoard Turbot 上尝试以下操作: 在终端窗口中,创建一个包含以下脚本的文件 blinkd2.sh,然后使用 sudo 命令运行脚本:sudo bash blinkd2.sh。
而已。这个简短的 bash 命令行脚本将以 1 cps 的速度切换 LED(D2)。请注意,您可以按 CTRL-C 停止脚本运行。

然而,Bash 脚本确实依赖于对 Linux 命令行的理解。如果您对 Linux 命令行没有信心,我建议您通过阅读一些Linux 教程开始学习它。
如果您更熟悉 Windows,您可以像使用 Ubuntu 一样轻松地使用 Windows IoT 核心和 MinnowBoard。事实上,我决定为这些后续步骤切换到 Windows IoT。MinnowBoard 是我拥有的第一个可以运行 Windows IoT 核心的 SBC,我想利用这个难得的机会。
闪烁的窗户!Microsoft Windows 的特殊 IoT Core 版本可让您快速启动和运行。如果您按照本教程进行设置以将 MinnowBoard Turbot 作为 Windows 10 IoT Core 系统运行,那么创建 LED 闪烁应用程序并将外部(低电流类型)LED 连接到 MinnowBoard Turbot 并不难。
您可以通过下载相关的 zip 文件并导航到samples-developBlinky (C++ 或 C# 版本)找到 LED 实验的源代码。在磁盘上复制文件夹并从 Visual Studio 2017 打开项目。这是确保一切正常并轻松使用您的板的好方法。幸运的是,大多数快速运行的示例都是预先构建的,不需要繁琐的编译或编码即可开始。
下图是实验的硬件配置。请注意,GPIO API 仅适用于 Windows 10 IoT Core,不适用于桌面系统。
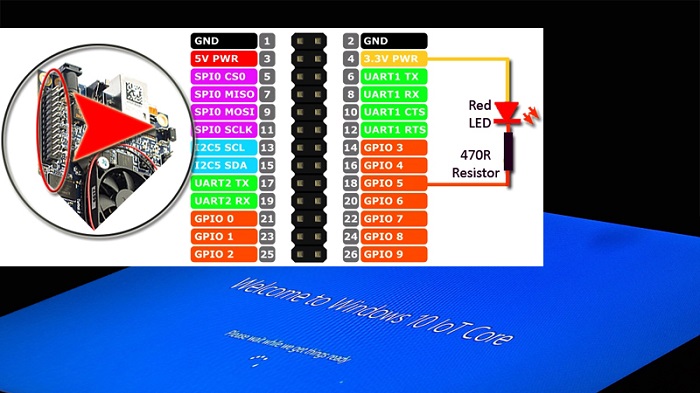
有关详细信息,请参阅此链接。
串行 UART
一旦您能够成功操作 GPIO 端口,下一步可能是使用 UART(通用异步接收器/发送器)。这些外围设备是计算机串行通信子系统中的关键组件,也是大多数微控制器中集成的常见功能。幸运的是, MinnowBoard 有两个板载高速串行 UART,可通过低速扩展接头使用。在 GPIO 引脚 6、8、10 和 12 处有 UART1,在 GPIO 引脚 17 和 19 处有 UART2。在 SATA 连接器旁边的 FTDI 连接器的引脚 6 上还有串行控制台端口 (UART0),但那是调试 UART ,所以你可能应该避免在开发过程中弄乱它。所有三个连接如下所示。
串行接口的一种可能用途是在 MinnowBoard 和 IoT 设备之间建立通信。要进行串行连接,您有两种选择:第一种是使用板载 UART 控制器,第二种是通过 USB/TTL 适配器使用 USB。
如果您要使用 UART2,您可以将 USB-TTL 电缆的 Tx 线(绿色)连接到 Rx 引脚(引脚 19),将 Rx 线(白色)连接到 Tx 引脚(引脚 17),然后GND 线(黑色)到板上的 GND(引脚 1)。只需断开 USB-TTL 电缆的电源线(红色)即可。
对于 USB 转 TTL 适配器方法,您需要一个基于 Silicon Labs CP2102 的 USB 转 TTL 适配器,因为它是 MinnowBoard 原生支持的。连接适配器时,请务必尝试使用 MinnowBoard 底部的 USB 端口。
设置好串行接口后,准备创建一个简单的应用程序以通过串行接口进行通信。以下是“有头”示例的“Windows”链接(Windows 10 IoT Core 可以配置为有头或无头模式以帮助您入门):更改模式的设置说明 示例应用程序说明 代码文件
下一步
我已经花费了大量时间和精力来使用 MinnowBoard 创建一个工作项目,尽管它还没有准备好。您需要耐心等待结果。我正在准备这篇评论的第三部分,稍作休息后将在此发布。与此同时,我将审查其他开发工具和电路板。
审核编辑:汤梓红


























 工商网监
工商网监
评论