 电子发烧友App
电子发烧友App


配套丰富、租金低廉,城中村和一些老小区成为很多人来到大城市的第一站。同时,人员聚集、建筑稠密、早期建筑资料缺失,这些区域的综合治理,亟需对区域内路网、建筑及室内实际情况,进行准确测量与还原。
拥有基于三维空间的人地关系数据,城市疫情防控、综合治理、城市更新及精细化管理等需求,都将拥有更为科学有效的抓手。
游刃有余,灵光 Lixel L1重建城中村
在深圳某城中村,XGRIDS其域创新在现场使用4台灵光Lixel L1,对区域进行三维重建,并在一天内生成对应户型图,是传统作业效率的十倍以上。
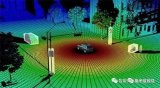
灵光Lixel L1采用自研实时三维实景重建技术,实现多传感器微秒级时钟同步,融合自研实时三维重建算法,在各种未知环境中,无需GNSS定位,便可轻松便捷地捕捉到准确全面的三维真彩点云数据。
 三维真彩点云直出
三维真彩点云直出 多源数据融合
多源数据融合同时,我们也使用了配套的LixelStudio一站式后处理软件,可以在点云数据的基础上进行多源数据融合重建,输出空地一体的室内外模型,还可根据点云模型一键直出建筑户型图。
 一键直出户型图
一键直出户型图 BIM模型建模
BIM模型建模基于Lixel L1的手持SLAM软硬一体解决方案,其域创新可以在12小时内完成上千所住房的三维激光点云采集及户型图生成。
获取的激光点云数据与户型图,可导入CAD、3DS Max、Revit等多平台满足不同使用需求,也可融合倾斜摄影、航空影像等数据,生成室内室外、空地一体的实景模型,让城市管理与更新有据可循。
四大优势,复杂区域采集重建更高效
1、全天候作业,外业效率大大提升
LixelGO App实时浏览重建效果,外业作业可现场确认结果;测量不受光线影响,环境适应性强,可灵活制定作业周期,是传统作业效率的十余倍。
2、数据真实有效,输出成果丰富
可快速获得真彩点云和图像数据,无需额外拍照记录;不依赖人为观测,数据真实有效,输出成果丰富,数据高复用。
3、操作简单易学,支持断点续扫
操作简单易学,单次作业长达1.5小时;支持断点续扫,可实现室内外一体化扫描作业,大规模场景无需分段作业。
4、内业绘制简便
内业点云处理时间短,自动化程度高,可自动生成平面户型图。
大有可为,三维重建新纪元
在城市更新、综合治理与精细化管理过程中,各个城市都对信息化提出了明确要求,既要完整,也要及时:
《深圳市城中村(旧村)综合整治总体规划(2019-2025)》提出,“城中村综合整治分区应建立地理信息数据库并纳入规划‘一张图’系统进行管理”;
《上海市城市管理精细化“十四五”规划》提出,加快数字孪生城市建设。围绕治理要素“一张图”,加快城市空间、城市部件、城市运行动态的数字化;
《广州市城市更新办法》则要求城市更新主管部门加强城市更新基础数据库和动态监控信息系统建设,实行更新改造全程动态监管。
灵光Lixel L1为城中村综合治理、老旧小区改造等城市课题提供了全新的数字化采集建模手段,助力解决老旧建筑信息不全、测量精准度低、改造进展缓慢、效果难以量化等问题。
只需单人手持,灵光Lixel L1即可完成作业,连续自动、快速捕获建筑物的高精度点云数据,采集即重建,极大地提高了测量重建效率。
灵光Lixel L1也可广泛应用于现代楼盘、城镇房屋、农村地籍、古建筑保护等广泛领域,为各行各业提供精准可靠的三维数据。
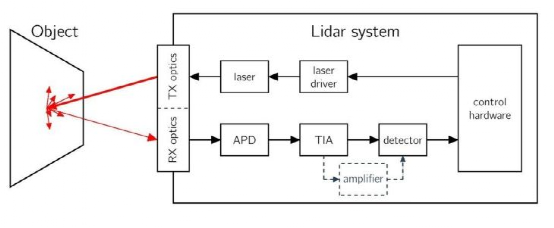
*手持SLAM、移动激光扫描系统主要由激光扫描仪、惯性导航系统及相机组成,用于测量点的三维坐标和激光反射强度,相机用于测量点的三维坐标和颜色信息。根据移动激光扫描系统和数码相机采集的数据可以得到点云数据,包括三维坐标、激光反射强度、颜色信息。
Simultaneous Localization And Mapping,简称SLAM,通过对各种传感器数据进行采集和计算,生成对其自身位置姿态的定位和场景地图信息的系统。目前SLAM主要的两种形式是:基于激光雷达的SLAM(激光SLAM)和基于视觉的SLAM(Visual SLAM或VSLAM)。
手持激光雷达、手持SLAM设备的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到周围障碍物上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离,脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体图像。激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。通常,激光SLAM系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了自身的定位。激光雷达距离测量比较准确,误差模型简单,在强光直射以外的环境中运行稳定,点云的处理也比较容易。同时,点云信息本身包含直接的几何关系,使测量和计算变得直观简单。
审核编辑 黄昊宇

















































 工商网监
工商网监
评论