 电子发烧友App
电子发烧友App


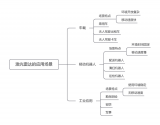
无人驾驶一般包括五个等级,但是不管哪个等级都会包含环境感知、规划决策和执行控制等三个方面,其中环境感知方式主要有视觉识别、毫米波雷达感知和激光雷达感知。
视觉识别
传统的视觉识别常见的应用场景有文字转录、人脸识别、指纹识别等等,不过这些视觉识别技术都有一个共同的特点,都是静止状态下的识别。而在汽车领域,视觉识别在识别内容和要求两个方面就与传统视觉识别有所不同。
识别内容方面,汽车领域的视觉识别最大难点在于,摄像头和识别目标两者都是相对运动的。比方说需要识别的机动车、非机动车、人,这些物体是参与交通的一部分且是处于主动运动状态。而障碍物,以及交通牌、红绿灯等交通标识则是相对运动状态。
而识别要求方面,则是追求低成本的同时还强调性能。一个足够强大的视觉识别系统,是可以替代激光雷达的作用,从而降低自动驾驶成本。但是由于技术特性的不同,会带来一定的可靠性问题。对于汽车而言,即使出现短暂性的问题都可能会严重威胁人身财产安全,比方说特斯拉的那两起事故。
毫米波雷达
作为无人驾驶不可或缺的核心传感器类型,毫米波雷达从上世纪起就已在高档汽车中使用,技术相对成熟。
毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点,且其引导头具有体积小、质量轻和空间分辨率高的特点。此外,毫米波导引头穿透雾、烟、灰尘的能力强,相比于激光雷达是一大优势。
但是毫米波雷达的缺点也十分直观,探测距离受到频段损耗的直接制约(想要探测的远,就必须使用高频段雷达),也无法感知行人,并且对周边所有障碍物无法进行精准的建模。
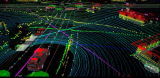
激光雷达
从当前各家公司的路测汽车照片来看,机械式的多线束激光雷达是主流方案。
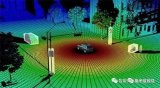
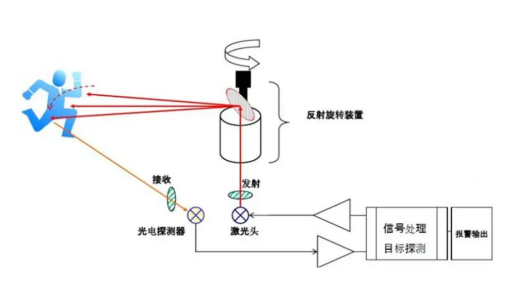
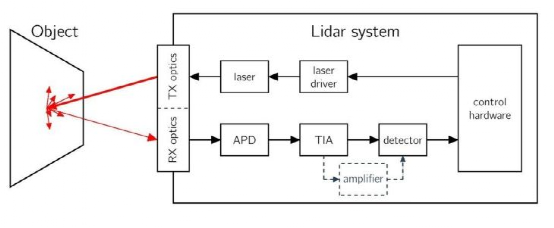
激光雷达主要是通过发射激光束,来探测目标的位置、速度等特征量。车载激光雷达普遍采用多个激光发射器和接收器,建立三维点云图,从而达到实时环境感知的目的。
与其他两种感知方式相比,激光雷达的优势在于其探测范围更广,探测精度更高。它能够准确的获取物体的三维信息,借助LiDAR所收集的空间三维数据获得路况信息,无人车可以自主规划路线和自主避障,准确判断障碍物在前方多远处、路口可以左转还是右转、停靠点位置有多大等等。而且探测到的数据量远超过毫米波雷达,鲁棒性和稳定性也相当高,所以它成为了目前无人驾驶厂商最钟爱的环境感知解决方案。
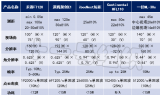
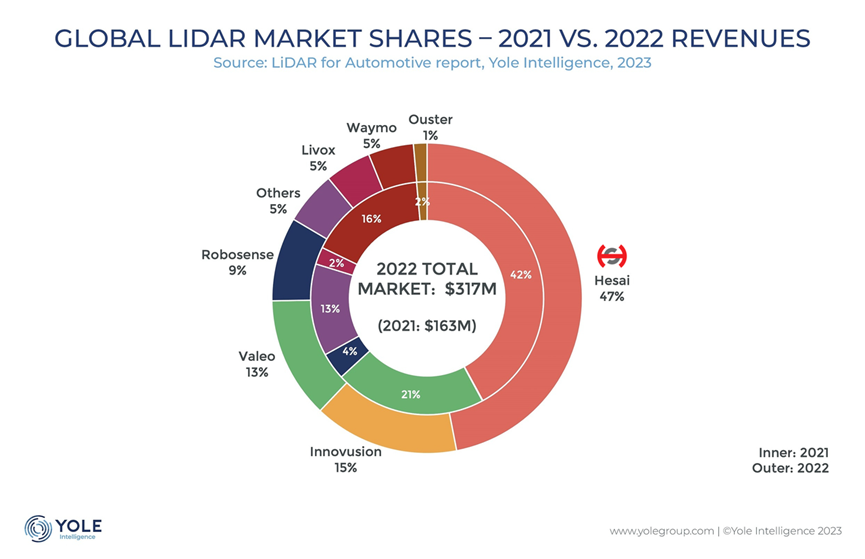
但是,激光雷达的缺点也相当明显,那就是居高不下的价格。谷歌无人驾驶汽车所采用的 Velodyne 64 线激光雷达的供应价格高达 7.5 万美元,相对便宜的 32 线和 16 线雷达的价格分别为 3 万美元和 8000 美元。同样,IBEO 的 4 线激光雷达单价也接近了 10 万人民币。
而对于激光雷达这种汽车传感器来说,有一个不可或缺的组成部分,那就是陶瓷电路板。
▲钰芯采用DPC工艺,在氮化铝表面形成金的线路,可作为半导体激光器件封装。
▲钰芯PDC工艺在氮化铝表面加工金线路后,涂覆绿色组焊油墨,可作为半导体激光器组件封装。
对于汽车电子器件而言,大多元件处于非常恶劣的运行环境中,而且各不相同。诸如工作状态时的高温、停车等待时的低温、电磁干扰以及高速运动是的风噪和高强度的冲击等。所以要求电子元器件和电路要有高稳定、对环境的自适应、自补偿调整的能力。
陶瓷电路板具有耐高温、电绝缘性能高的特点,其次在介电常数和介质损耗低、热导率大、化学稳定性好、与元件的热膨胀系数相近等优点也十分显著, 因此被广泛应用于汽车传感器中。
钰芯作为一家专注于研发和生产电子级陶瓷薄膜电路的高新技术企业,针对陶瓷基样板的快速设计和加工提供全方位服务。产品包括氧化铝、氮化铝、铝硅碳的单面和双面薄膜电路基板,和配套其使用的AuSn20 共晶焊料。
▲钰芯氮化铝激光打孔后,带图形镀金,可作为集成电路承载块。
▲钰芯0.80mm厚度氮化铝双面镀金后图形化加工,可作为激光器连接片。
▲氮化铝激光打孔后电镀金的图形,可作为光电芯片电路。
文章来源公众号:化学传感科技评论










































 工商网监
工商网监
评论