旋转磁场运转,其运动与施加在绕组上的交流电压同步。直流无刷电机高效率高、可控性强,使用寿命长。广泛用于洗衣机、空调、吸尘器、电动车、工业控制、机器人等领域。
无刷电机是如何驱动的?
简介: 有刷电机
2024-03-12 09:35:54
工业电机驱动作为工业自动化系统中最重要的执行单元,其响应速度,执行动作的精度直接决定了自动化系统的性能.在实际场景中,以工业变频和伺服驱动器等主流产品广泛应用于工业 4.0, 向工业机器人,数控机床
2024-01-12 15:24:57 220
220 相对于一般的工业机器人及家用服务机器人,特种机器人的工作环境和作业条件更为复杂,对机器人结构和功能也提出了更高的要求。因此,未来特种机器人领域将呈现出更多的创新和发展。
2024-01-04 11:42:06282 
将系统分为算法实现和仿真模块、DSP控制模块、及机器人驱动模块,以验证算法的有效性。
KUKA KRAGILUS工业机器人的实体控制测试:最终,项目工业机器人的实体控制。在LabVIEW建立的3D仿真
2023-12-21 20:03:18
更上一层楼。
硬件设计
本项目中的自平衡赛车机器人的硬件设计结构非常简单,硬件部分主要由R128开发板和几个驱动模块组成。
供电模块
自平衡机器人采用锂电池供电的方式,并利用mini360航模电池降压
2023-12-20 10:22:18
、雷达传感器等设备的数据,夸父人形机器人能够更加灵活和高效地完成各种任务。同时,通过KaihongOS的链接,夸父人形机器人构建全场景生态,实现在科研教育、特种行业、工业应用、家庭场景、智慧康养等
2023-12-20 09:31:19
;>>点此查看全文&下载资料
2.分享一个大佬的设计作品:一只瓦力机器人
主要叙述机器人的系统硬件电路设计,包括锂电池充放电电路、WiFi图传电路以及机器人
2023-12-12 10:28:32
自动移液机器人, 全自动移液工作站在生物医学研究、化学实验以及临床诊断等众多领域,精确且高效的液体处理能力至关重要。而近年来,随着科技的飞速发展,一种名为“自动移液机器人”的设备应运而生,不仅
2023-12-06 11:21:24
,以及包管理。它也提供用于获取、编译、编写、和跨计算机运行代码所需的工具和库函数。图1
随着工业智能化的快速发展,智能机器人设备已成为工业自动化体系的佼佼者,而智能机器人设备核心—ROS系统,是机器人
2023-11-30 16:01:01
pic单片机做扫地机器人有什么优势
2023-11-09 07:24:46
GC6209是双通道5V低压步进电机驱动器,具有低噪声。低振动特性,特别适用于相机的变焦和对焦系统万向节和其他精密低噪声STM控制系统。
芯片应用于 摄像机,医疗器械,机器人 消费类产品等
芯片特点:内置2个STM驱动器,用于变焦和对焦
输出驱动电流高达0.8A
2023-11-03 17:27:47
机器人编程需要什么软件
2023-11-01 07:34:30
电子发烧友网站提供《机器人微型电机驱动器的设计与实现.pdf》资料免费下载
2023-10-30 09:35:46 0
0 EPR6-S工业机器人专用六轴伺服驱动器通过EtherCAT转profinet网关与西门子PLC1200连接
本案例EtherCAT转profinet(Profinet转EtherCAT)网关
2023-10-24 14:04:48
电子发烧友网站提供《常用电子元器件分类.pdf》资料免费下载
2023-10-20 14:52:531 在之前的文章中,相信你已经对ABB机器人的MOVE指令以及常用专属名词有一定的了解了,而从这篇文章开始,继续学习新的 编程常用指令 。
2023-10-19 10:40:39813 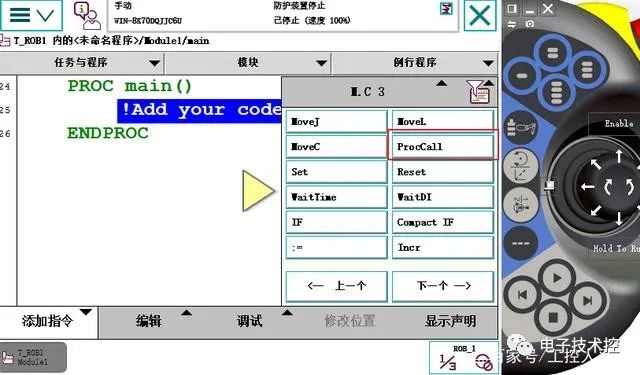
随着智能制造、自动化生产的发展进步,工业机器人的身影越来越多地出现在工厂现场,成为新型无人化、智能化生产制造的中坚力量。 工业机器人的运行伴生着海量的数据采集、传输、分析和反馈执行,因此也
2023-10-09 17:42:53
本文档的主要内容详细介绍的是Arduino教学机器人的使用教程
2023-09-27 06:53:26
运输过程中带来的产品的损坏,突破了产品生产效率和产能瓶颈。”
稳石机器人为全球知名日化企业打造自动化上下料解决方案。产线利用稳石机器人提供的先进技术,实现了自动化的物料搬运、分类和分拣等功能,使生产线
2023-09-21 13:45:14
的运营成本、人力成本还在不断提高(如:办公场地的租金、员工的工资、社保公积金、节假日福利等)。
如今的智能电话机器人,每天的电话拨打量可达800-1000通,相比人工提高了3-5倍,大大缩短了名单的筛选
2023-09-21 11:09:59
迈步手部康复外骨骼机器人,机器人可以带动手指完成两种康复运动——双向弯曲运动和内收外展运动。机器人可适应不同患者的手指尺寸,外骨骼手的长度可调节,长时间佩戴不会使患者产生疲劳感。手部康复外骨骼机器人
2023-09-20 17:38:02
下肢外骨骼康复机器人BEAR-A1利用仿生学、人体工学、机器人技术,为下肢运动功能障碍者提供康复训练。通过对患者髋、膝关节提供助力完成康复训练,可以有效降低治疗师工作强度,提高康复训练效率,提高患者
2023-09-20 17:31:33
。 BEAR-H系列 外骨骼机器人是全球首款采用了柔性驱动器作为动力输出的外骨骼机器人。 BEAR-H1 拥有带动力的6关节(双侧髋、膝、踝),和髋
2023-09-20 17:25:48
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
2023-09-20 06:24:09
运动控制与机器人密切相关。工业应用中的机器人必须透过由多款电机所构成的致动器才能自行移动,以执行任务或透过机器手臂抓取工具。
2023-09-06 14:21:02552 
产品介绍小安值班机器人是集电力监控系统、动环辅控系统、巡检机器人“三合一"功能产品,在自学习算法和大数据的加持下,具备强大的AI能力,可实现配电室的数字化及无人值守。 特色功能全感知电力
2023-08-22 14:57:47
爬壁机器人可以根据其工作原理、设计和应用领域进行分类。以下是一些常见的爬壁机器人分类:1. 吸盘式爬壁机器人;2. 磁力式爬壁机器人;3. 轮式爬壁机器人。
2023-08-21 14:53:31536 近日,搭载深圳开鸿数字产业发展有限公司(简称“深开鸿”)KaihongOS软件发行版的工业平板、机器人、无人机等商用产品均通过OpenAtom OpenHarmony(以下简称
2023-08-17 18:02:10
采摘耗时长成本大的问题,提出了一种全向移动的草莓采摘机器人系统方案。
系统的硬件电路主要包括以STM32F407ZGT6为核心的主控制器、电源电路、WIFI模块、激光测距单元、电机驱动模块。系统
2023-08-16 17:35:54
等。其中,伺服电机被称为“工业机器人的心脏”,成本占比约35%,一般安装在机器人的“关节”处,为工业机器人提供精准的控制效果。伺服电机广泛应用于先进制造业,替代需求+新
2023-08-14 09:51:44520 
机器人在运行过程中,是通过伺服电机的驱动实现多自由度的运动的。如果对机器人运行的动作速度、精度有比较高的要求,实际就要求伺服电机的响应速度、控制精度要足够高。因此,在选择伺服电机的时候,一定要掌握步骤,把握要点。
2023-08-03 10:31:17941 协助机器人和工业机器人并没有严格的界限,有些协助机器人可能具备一定的工业机器人功能,而一些工业机器人也可以通过安全措施实现与人类的协同工作。因此,在具体的应用场景中,根据需要和要求,可以选择适合的机器人来实现自动化任务。
2023-07-20 14:31:45695 基于新能源汽车驱动电机的基本性能要求,目前常用驱动电机类型主要包括三大类,即交流异步电机、永磁同步电机和开关磁阻电机。目前,各车企配套车型统计中,每个车型选用的驱动电机类型也有所不同。
2023-07-15 17:38:132635 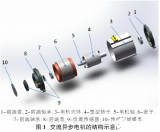
焊接机器人主要有电机驱动、液压驱动以及气压驱动三种驱动方式,无锡金红鹰带您了解焊接机器人的三种驱动方式。
2023-07-07 16:50:35540 动力问题是机器人的核心问题,波士顿动力采用液压执行器进行辅助驱动。波士顿动力早期机器人主要是电机通过齿轮驱动连杆机构,对于没有载荷要求的机器人而言足够,但BigDog这类以内燃机为动力且需搭载较大负荷的机器人产品系统能耗高,能量的多次转换、多环节传递造成了大能量损失,原有设计方案无法满足。
2023-07-06 14:45:13487 
柔性供料/震动盘是主要以小型电子产品为主,那么中大型其它产品就不能解决了吗?不是!我们针对柔性供料所研发的系统,它是可以适用于所有电子产品。柔性供料系统它包含CCD视觉、CCD视觉控制系统与机器人
2023-06-29 14:46:57
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。
基于整个智能制造的发展
2023-06-28 09:52:41
量,保证移动机器人按照规划路径顺利地到达目标位置。而开环控制则是根据预先设定的控制量进行运动控制,不考虑机器人当前状态的影响。开环控制相对简单,但精度较低,常用于一些简单的任务。
然而由于自主导航系统
2023-06-28 09:36:32
一些学机电的,去过一些类似公司做一些机器人的调试校准,每天就调程序,调打磨角度,提高工艺精度。至于工业机器人算法以及研发类的,目前国内这类的公司比较少,且对于个人的能力要求也比较高,用学历来看的话,都是硕士
2023-06-26 14:04:22688 、力矩电机等。 伺服电机在控制精度、过载能力、速度响应等性能方面表现优异,广泛应用于工业自动化、机器人等领域,而步进电机则具备性价比优势。 二. 人形机器人电机用量 人形机器人新增更多电机需求,伺服电机和步进电机均具备适配
2023-06-25 15:18:24783 
AP5688同步降压恒压驱动芯片
12-24V输入扫地机器人专用芯片模块电机供电驱动
4-30V 输入、3.6A 输出同步降压驱动器
产品描述 特点
应用领域
应用原理图
AP5688 是一款支持宽
2023-06-12 15:08:41
自编程是如何完成的。
自编程其实也不是很高深的问题。
当用户给出参数时,有时也包括逻辑。
例如用户说,如果设备打开完毕,执行一个命令。
这个例子就包括了一个如果。你的智能机器人只需要生成一个
2023-06-08 16:20:45
一帧。
而机器人能提供些什么动作呢?它主要提供几个圆的转动和距离。难度多是三维坐标以及圆形,三角形的计算。如果要更智能,需要加入眼睛,耳朵等其它功能。它主要要生产一个产品的建模数据。或者障碍物,设备
2023-06-06 16:18:33
本文主要讲了工业机器人驱动系统。驱动系统驱控机器人的执行机构产生相应的动作,包括液压驱动、气压驱动、电气驱动和机械驱动等。
2023-06-01 12:55:52738 
一种高性能驱动解决方案,具有出色的功能和特性,可以在工业自动化系统中发挥重要作用。本文将介绍TB5128FTG驱动芯片的基本特点、工作原理,并深入探讨其在工业自动化中的应用案例,包括机器人控制、CNC
2023-05-30 15:14:18
我正在开发一些 WSN 机器人,
我现在正在使用 2 个 ESP8266,一个充当 WSN 传感器节点,另一个充当机器人节点,
机器人在从其他 WSN 传感器节点获取数据时正在工作(现在亮起LED
2023-05-22 09:55:59
儿童陪护机器人越来越受到人们的关注,其中转动控制是其重要组成部分之一。步进电机芯片作为一种常用的控制芯片,被广泛应用于儿童陪护机器人中的转动控制。本文将从步进电机芯片的工作原理、优势和应用场景等方面
2023-05-11 15:12:45
工业机器人的分类可以根据不同的标准进行,这里列举了几种常见的机器人分类方法。正确认识工业机器人的基本类型和特点,对于正确选型、规划生产线以及实现自动化生产都非常重要。
2023-05-06 17:39:37678 通常由电机控制器、电机驱动、电机本体(多为伺服电机)组成。电机控制器具备智能运算功能,并可传送指令以驱动电机。驱动可提供增压电流,根据控制器指令以驱动电机。电机可以直接移动机器人, 也可通过传动系统
2023-05-06 11:06:371 定位, 且转动惯性小,动态响应快。主要应用包括自动化生产线,机器人关节,机器人关节、医医疗仪器及设备、精密仪器和工业控制系统,以及其他许多的应用。
2023-04-20 10:07:10
RDM协作机器人关节伺服驱动模块是一款基于FPGA 先进技术开发而成的高性能、直流供电、结构极其紧凑的全数字通用伺服驱动器,最大功率可达 1000W。通过EtherCAT/CANopen 总线控制
2023-04-19 15:39:40
泰科关节机器人具备哪些优势? 一、编程简单可以让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏
2023-04-19 15:13:28
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 15:03:00
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 14:54:26
深圳泰科智能TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作
2023-04-19 11:43:30
深圳泰科智能TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作
2023-04-19 11:39:15
深圳泰科智能TA6系列协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足
2023-04-19 11:14:26
TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-19 10:58:47
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:53:03
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:48:11
,让机器人开发更自由高精度绝对值编码器,精准控制运动轨迹,多圈绝对值编码器分辨率标配16单圈和16多圈,保障机器人定位更精准、运行轨迹的稳定性更好减少机器人开发过程
2023-04-19 10:40:37
TB6-R3协作机器人是一款灵活的小型工业协作机器人,其精巧的机械结构设计,外形紧凑,能够适应狭小的工作空间,及高精密的工作任务需求;这款协作机器人自重仅为11.5KG,有效负载为3KG,工作半径达666mm,是轻型装配和高精度控制的理想选择。
2023-04-19 10:18:50
TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作机器人功能强大、高自重负载比、高可靠性、模块化关节设计,易于末端扩展外部设备,可以实现快速安装部署。
2023-04-19 09:27:59
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。-
2023-04-19 09:22:29
TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产应用需求。模块化
2023-04-19 09:16:32
定位, 且转动惯性小,动态响应快。主要应用包括自动化生产线,机器人关节,机器人关节、医医疗仪器及设备、精密仪器和工业控制系统,以及其他许多的应用。
2023-04-18 17:35:19
产品优势专注机器人关节研发,RJS系列关节模组具有定位精度高、性能可靠等特点。 模块化设计RJS关节模组集成无框电机、驱动器、谐波减速器、编码器、制动器于一体,结构小巧紧凑,6轴RJS关节
2023-04-18 14:04:34
RDM协作机器人关节伺服驱动模块是一款基于FPGA 先进技术开发而成的高性能、直流供电、结构极其紧凑的全数字通用伺服驱动器,最大功率可达 1000W。通过EtherCAT/CANopen
2023-04-17 18:13:06
,让机器人开发更自由高精度绝对值编码器,精准控制运动轨迹,多圈绝对值编码器分辨率标配16单圈和16多圈,保障机器人定位更精准、运行轨迹的稳定性更好减少机器人开发过程
2023-04-17 18:01:33
TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-17 17:49:50
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 17:40:55
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。
2023-04-17 16:36:37
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 16:25:29
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 16:12:03
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:57:13
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C
2023-04-17 15:49:48
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C
2023-04-17 15:40:56
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:31:15
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:25:07
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:15:06
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:07:26
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:02:00
口上面,当机器人开始加水时,传感器会检测水位并将数据发送到一个微处理器。微处理器会根据清水箱的容量,来判断是否需要再次填充水。如果水位已满,机器人将停止加水。污水箱中也有水位传感器,但这个传感器测量
2023-04-15 11:21:46
Linux5.4.0/Android11高版本、高稳定性的操作系统,驱动更加完善,系统源码开放,可以让客户快速进入产品测试阶段。智能巡检机器人的出现不仅让作业人员的人身安全得到了更好地保障,同时也大幅提高了
2023-04-12 15:49:23
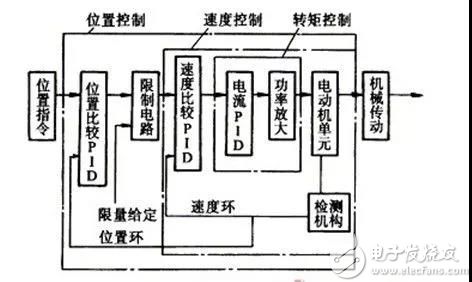
机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行。机器人常用的电机主要包含三种类型:普通的直流电机、伺服电机、步进电机。
2023-04-06 17:01:47606 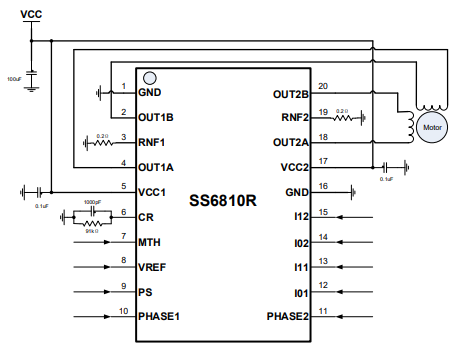
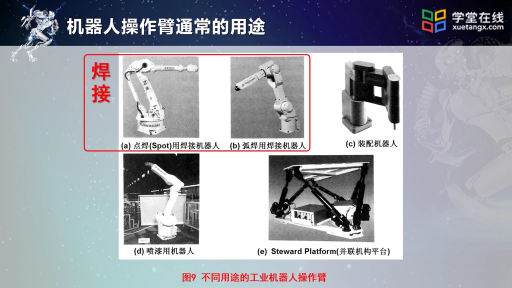
工业机器人的基本构成,可参见图 3 和图 4 。图 3 为一台电动机驱动的工业机器人,图 4 为一台液压驱动的工业机器人。焊接机器人基本上都属于这两类工业机器人,弧焊机器人大多采用电动机驱动机器人,因为焊枪重量一般都在 10kg 以内
2023-03-24 10:24:001757 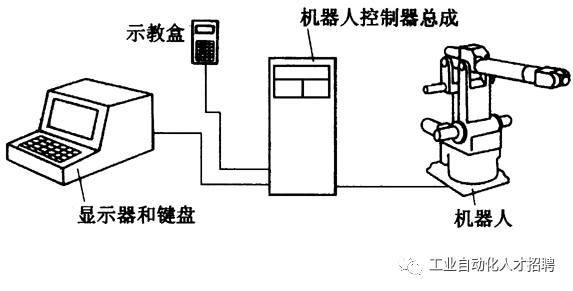
工业机器人产业链主要是由机器人零部件生产企业、机器人本体生产企业、代理商、系统集成商、最终用户构成。本体是机器人产业链的核心,通常,本体企业设计本体、编写软件,采购通过代理商销售给系统集成商,系统集成商直接面向终端客户。有的本体企业和代理商也会兼做系统集成商。
2023-03-24 09:50:18606
 电子发烧友App
电子发烧友App















 工商网监
工商网监
评论