 电子发烧友App
电子发烧友App



一种用于电动自行车改装的制动能回收电路
周松涛
( 双林集团上海电子研发中心,上海 201799)
摘要:就目前市面上在售和社会已保有电动自行车都没有制动能回收功能的现状,提出了一种完全基于硬件控制、接线简单、改装容易的制动能回馈控制电路方案,用于现有电动自行车的后加装制动能回收,以提高现有电动自行车的行驶里程,并给出了具体的实现电路。利用电路设计软件Altium Designer中的仿真功能模拟不同车速下的电机发电状态对电路进行了仿真验证,仿真结果验证了该电路在不同车速下能有效地实现制动能量的回收。
关键词:制动能回馈;续航里程;能量回收控制;电路仿真;电动自行车;
引言
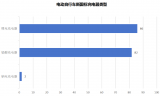
电动自行车在目前还是城乡居民短途出行的主要交通代步工具,在国内保有量巨大。由于电池成本及体积重量等原因要增加电动自行车的行续航里程单独依靠增大蓄电池的容量来实现已经非常困难,所以制动能回收利用对提高电动自行车的续航里程有着非常实际的意义。尤其在城市道路中行驶,由于红绿灯频繁、行人和车辆众多,电动自行车行驶过程中会频繁地出现起步、加速与制动等动作,在这种路况下实现制动能回收利用,对提升电动自行车的行驶里程更是意义重大。有研究表明,在行驶状况变化比较频繁的路段,采用制动能量回收可增加续驶里程约20%。但从目前市面上在售的和居民保有的电动自行车来看和都不具备制动能回收再利用的功能,针对这一现状,设计一款完全由硬件实现、外部连接简单、改装容易的电动自行车制动能回收控制电路,用于改装现有电动自行车,有着巨大的商业价值和社会环保价值。
1 制动能回收的基本原理
制动能量回收是指在电动自行车制动时,将车辆运动时的动能依靠发电机转化成电能储存在电动自行车的储能装置(蓄电池或超级电容)中,而发电机在给储能装置(蓄电池或超级电容)充电时会产生一定的电磁阻力使电动自行车速度降低,达到制动的目的;当电动自行车再次启动或加速时控制系统又将存储的能量再次转化为电动自行车行驶时所需要的能量。这样就可以减少机械制动时车辆的动能变为摩擦热能的消耗 ,有效地减少了能耗,增加一次充电的续行里程数,提高了电动自行车的能量使用效率。
1.1 电动自行车制动过程的能量转换
假设车辆是在水平的道路上行驶,电动自行车在制动过程中,从初始车速V0减速至车速V1,其能量转换关系为:
1/2mV02 - 1/2mV12 = Wf + Wa + Wb
式中 m为电动自行车加上人体及所载物品的总质量,Wf为滚动阻力及传动阻力所作的功,Wa为空气阻力所作功的和,Wb为制动力所作的功。
其中,滚动阻力和空气阻力及传动阻力所作的功(消耗的能量)是无法加以回收的;而制动力由机械摩擦力和电机再生制动时的电磁力两部分组成,机械摩擦制动力使车辆减速所作的功都转化成热能散发在空气中不能被回收利用,所以只有电机产生的再生制动时产生的电磁力才能将车辆运动过程中的动能转化成电能,通储能装置(蓄电池或超级电容)存储起来加以重新利用。
1.2 电动自行车的制动模式
具备制动能回馈系统电动自行车的制动模式一般有以下几种模式:紧急制动模式、正常制动模式、长下坡制动模式。
(1)紧急制动模式是在电动自行车车速较快出情况下,出于安全考虑,需要车辆快速停止情况下所采用的制动模式。在这种模式下机械制动的摩擦力和电机工作在发电制动状态时的电磁力是同时发挥制动作用共同完成制动过程。但由于一般路况下紧急制动出现的频次较少,加上制动过程持续时间很短,所以在这种模式下能够回收的能量较少,大部分的动能多消耗在机械制动摩擦所产生的热能上。
(2)正常制动模式是在电动自行车行驶过程中需要减速但不急于使车辆停止时采取的制动模式。这种制动模式下制动过程明显地被分成了减速过程和停止过程两个阶段,在减速阶段为了最大限度地回收制动能量,制动力矩完全由工作在制动发电状态的驱动电机的电磁力提供;在车速降到一定程度后,由于电机在低转速下产生的电动势已经很小,加上制动能回馈电路中某些电子元器件本身电气参数特性的限制(如二极管的正向压降等),驱动电机的制动扭矩已经很小(或基本消失)不足于使车辆完全停止下来,这时为了让车辆完全停止下来,应及时切换到机械制动状态,这个过程就是停止阶段。这两个制动过程的切换点由电机特性和控制系统的参数来共同确定,掌握好正确的切换点就能够回收尽可能多的制动能量。
(3)长下坡制动模式是电动自行车在长距离下坡道上行驶时,为了使车辆保持在一定的安全车速而采取的一种制动模式。这种制动模式和普通正常制动模式中的减速阶段类似,制动力矩完全由工作在发电状态的驱动电机的电磁力提供,可以将车辆下坡时由势能产生的车辆动能转化成电能存储起来加以回收利用。
1.3 能量回馈系统的控制策略
制动能量回馈系统的控制策略,其实质就是在保证安全的前提下,为了使能量最大程度的被回收利用,使制动过程工作在最合适的制动模式。基于成本的原因,电动自行车制动能量回收策略不需要(也不可能)像电动汽车那样,有复杂的(软硬件)算法,制动过程中制动模式的切换是完全是由驾驶人员的意志通过操作电动自行车的刹车手柄来完成。
本设计使用的电动自行车制动能回收的策略是在电动自行车刹车手柄捏下1/3 行程以内时制动力矩完全由电机发电制动的电磁力提供,在这种情况下,系统能提供较多制动能回馈;在刹车手柄捏下超过1/3行程后,制动力矩由电机发电制动时的电磁力和机械制动的摩擦力共同提供,在这种情况下只有部分的制动能被回收利用。
选取刹车手柄1/3行程处作为机械制动的切换点是基于以下的考虑:
1、刹车把手的行程1/3是人手比较容许把控的点,由于制动策略的实施是完全依赖于驾驶人员的意志通过人手实现的,所以制动模式的切换点必须在选在人手易于把控的位置;
2、制动模式的切换点如果设置过小(如刹车手把行程的1/5或1/10),人手不易把控,容易使机械制动过早地介入,不利于制动能的最大回收利用;
3、制动模式的切换点如果设置过大(如刹车手把行程的1/2或2/3),人手切换到机械制动需要较长的时间,在紧急情况下不利于行安全。
2 控制电路设计
由于电路设计目的是用于现有电动自行车制动能回收的加改装,所以控制电路的设计应使外部的连线尽可能的最少,并且不能改变电动自行车的原有线路,以确保电动自行车原有线路的安全完整。
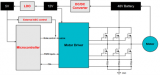
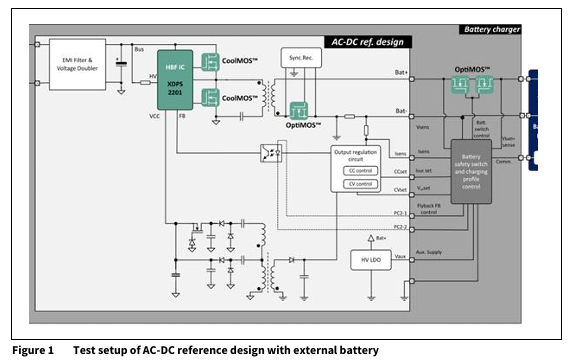
制动能回收电路是否需要工作是通过判断电动自行车刹车灯开关是否闭合来实现的。电动自行车的刹车灯开关分为高边控制和低边控制两种方式,高边控制是指刹车开关是串连在电源端和刹车灯之间 的一种控制方式,低边控制是指刹车灯开关串连在刹车灯与地之间的一种控制方式。目前市面上的电动车存在两种不同的制动灯控制方式,论文针对这两种不同方式分别设计了两种制动能回收电路。图1和图2别给出了这两种适合不同制动灯控制方式的电动自行车制动能回收控制器的原理图。
图1:用于制动灯开关在高边的主动能回收控制原理图
图2 用于制动灯开关在低边的制动能回收控制原理图
2.1 控制电路与电动自行车的连接
(1)控制动灯控制为高边制的电动自行车连接:将制动能回收控制电路中的Pa、Pb、Pc端口分别连接电动自行车驱动电机A、B、C三个相线(没有相序要求,可以任意连接),控制电路中的P-端口连接电动自行车蓄电池的负极、P+端口连接蓄电池正极,控制电路中的P12端口连接制动灯的正端,只需6根连线就可以使普通的电动自行车具有制动能回收功能,无需改动电动自行车原有的电路。图1虚线框外为连接示意图(端口Pg可以不连接)。
(2)制动灯控制为低边控制的电动自行车连接:和制动灯控制为高边控制的一样,将制动能回收控制电路中的Pa、Pb、Pc端口分别连接电动自行车驱动电机A、B、C三个相线(没有相序要求,可以任意连接),控制电路中的P-端口连接电动自行车蓄电池的负极、P+端口连接蓄电池正极;不同的是,控制电路中的P12端口连接是电动自行车DC/DC模块的12V输出端口,需要多连接一个端口Pg至制动灯的开关,需7根连线,比高边控制方式的多一根连接线,和高边控制方式一样也无需改动电动自行车原有的电路。图2虚线框外为连接示意图 。
2.2 电路的工作原理
制动能回收的基本原理是在车辆制动期间使驱动电机工作在发电状态,给蓄电池充电,但驱动电机即使在全速运行状态(驱动电路给电机施加占空比为100%的工作电压的运行状态)电机的反电动势也不可能超过电源电压,所以如果没有制动能回馈控制器的协助,虽然在车辆制动期间驱动电机的端口有电势出现,没有制动回收电路的普通电动自行车是不会有能量回馈给蓄电池。
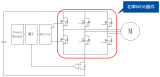
本电路的工作原理见图1和2是将电动自行车的驱动电机三相直流无刷电机在制动时输出的 三相交流电经D4至D9等6个二极管组成的三相全桥整流,经C1滤波后在D点得到一个直流电压,由于这个电压比蓄电池的电压低,所以不可能直接给蓄电池充电。因此由L1、Q1和D1组成一个典型的Boost升压电路,通过电感L将驱动电机输出的电压较低的能量搬运到电压较高的蓄电池中。R是一个电流采样电阻,U1A组成一个运算放大器,将R两端的电流信号放大51倍后 送到比较器 U2A的反向输入口与U1B组成的电压跟随器输出的电流设定值进行比较。比较器是迟滞比较器,迟滞电压被控制在正负0.7V左右(由二极管D2和D3双向限制),当电流低于设定值加一个固定的迟滞值时比较器输出一个高电平,这个电平经Q2、Q3电流放大后驱动Q1(MOSFET)导通,这样驱动电机经整流后的电压就加在电感L两端,电感中的电流将随时间线性上升,上升的斜率与驱动电机整流后的输出电压有关,这期间电感L从驱动电机获取能量J=1/2(⊿i+)2L。同时电流采样电阻R上的电压也随电流增加,经运放放大后送到比较器输入端的电压也相应增加,当大于设定值+0.7V后比较输出变为低电平,这时Q1被迅速关闭截止。由于电感中的电流不能突变,电流将经二极管D1给蓄电池充电,期间电感L种的电流随时间直线下降,电感中电流下降的斜率和蓄电池电压的高低有关。这期间电感向蓄电池转移能量J=1/2(⊿i-)2L。此时采样电阻R上的电压也随着下降,经运放放大后送到比较器输入端的电压也降低,当低于设定值-0.7V是,比较器输出又跳变为高电平,Q1又将被打开,电感又开始从驱动电机输出取得能量,循环往复,整个电路形成一个自我闭环的自激震荡。
3 电路的仿真分析
电路仿真是利用电路设计软件Altium Designer中Pspise仿真模块进行电路瞬态仿真分析。为了简化分析,将电路中制动过程中工作在发电状态的驱动电机和整流电路用一个可变的直流电压源来模拟,电动自行车中的蓄电池用一个48V的直流电压源来模拟,这样的模拟和实际是比较吻合的,蓄电池本来就是个直流电压源;驱动电机在制动期间工作在发电状态,其端口输出的是三相交流电压,经整流滤波后得到一个直流电源,所以也可以把它看作一个直流电压源,只不过这个电压会随车速不同而变化,车速低时输出电压也低,车速高时输出电压也比例升高。
图3 是实际用于仿真分析的电路原理。图中,电压源V2用于模拟车辆在制动期间驱动电机经整流滤波后的输出电压;电压源V3用于模拟电动自行车中48V的蓄电池;电压源V1用于模拟提供电路工作的12V电源。R0是为了观察充电电流波形而设置的一个采样电阻,由于其阻值设得很小(可以把它看作V3的一个内阻),不会影响仿真的结果,其它部分的电路是和控制器的实际电路完全一样。
图3 用于仿真的制动能回馈控制电路
首先设置电压源V2电压设为1V来模拟车速较低时驱动电机整流后的输出电压,对电路进行仿真,来验证电动自行车在车速较低的时候制动能量是否有效回馈给蓄电池。图4是该状态下得仿真波形,图中蓝色的是F点是驱动Q1的电压波形,红色的是E点是电路给蓄电池充电的电压波形,r0[i]为充电电流波形,L1[i]为电感中的电流波形。电感中电流上升的时间实际是从电压源V2(模拟驱动电机在制动发电时的电压)吸取能量的过程,电感中电流下降的这段时间实际是电感中的能量向电压源V3(模拟电动自行车中的48V蓄电池)充电转移的过程。从仿真波形的结果可以看出,由于车速较低时动能较小,充电电流波形的占空比很小,平均充电电流很小,回收到的能量也就较小。
图4 V2设为1V来模拟车速很低情况下制动时控制电路的仿真波形
图5 是将电压源V2电压设为24V模拟一般车速下制动时控制电路的工作波形。从充电电流波形可以看出,此时充电电流的占空比较大,平均充电电流也较大,这说明车较快时,车辆动能就大,回收到的制动能也较多。
图5 V2设为24V来模拟一般车速下制动时控制电路的仿真波形
图6 是将电压源V2电压设为47V模拟车辆高速情况下制动时的控制电路的工作波形。这时充电电流波形的占空比已经很高,所以平均充电电流也高,回收的制动能量也高。
图6 是将电压源V2电压设为47V模拟车辆高速情况下制动时的控制电路的工作波形。这时充电电流波形的占空比已经很高,所以平均充电电流也高,回收的制动能量也高。
图6 V2设为47V时模拟较高车速时制动能回收电路的仿真波形
5 结论(结语)
1.这是一个纯硬件工作原理的能量回收电路,实现简单,不需要复杂的控制算法,在实际的商业的设计考虑中实用性很高,成本低,跟现有电动自行车原有电路不冲突,不需要改变原有电路,可实施性很高。
2.从电路原理仿真结果看,能量回馈在整个车速范围之内制动能都能有效回收,能达到制动能回收的目的延长了一次充电后的续航里程。符合国家提倡的环保节能的政策。
3. 这是一个完全原创的能量回馈控制电路,在现有市面上的电动自行车一般都没有制动能回收装置,所以对新型环保电动自行车有巨大的市场需求和商业价值。
仿真结果验证了给电路,在从低速到高速不同的车速下制动时,都能有效地回收制动能量给电池充电。
参考文献:
[1] 期刊——娄洁,戴龙泉. 电动汽车制动能量回收控制策略研究[J]. 《安徽科技学院学报》, 2010, 24(3): :13-18[2]杨建军,黄海波,王永忠,李平飞.汽车构造实验教学环节探讨[J].实验科学与技术,2011(2):105-108.
[3]朱为国.汽车构造课程理论和实践教学改革探索[J].中国冶金教育,2009(6):44-45.
[4]刘绍娜,李书伟.汽车构造课程教学的思考[J].科教文汇,2011(3):59,63

































 工商网监
工商网监
评论