机器人元器件 机器人套件
2024-03-14 22:03:38
机器人元器件 机器人套件
2024-03-14 21:13:23
机器人元器件 机器人套件
2024-03-14 20:37:55
机器人元器件 机器人套件
2024-03-14 20:37:45
ZR机械手:推动制造业向更高水平发展-速程精密 随着科技的不断发展,制造业正面临着巨大的变革。在这个过程中,ZR机械手以其卓越的性能和创新的技术,成为了推动制造业向更高水平发展的重要力量。 ZR
2024-02-28 15:06:08 112
112 
ZR机械手:技术升级,推动产业变革 随着科技的飞速发展,自动化设备在各个产业领域中的应用越来越广泛。作为自动化设备的重要组成部分,机械手在提高生产效率、保证产品质量、降低劳动成本等方面发挥
2024-01-11 09:21:59143 简介机械手激光焊接机运行轨迹灵活,传输光纤和六轴机器人配合,适用于大幅面、异形不规则工件或者难以焊接部位的焊接,如抽油烟机、空调等的焊接;一、产品描述1.产品特性1、机械手激光焊接机运行轨迹灵活
2024-01-04 14:24:38
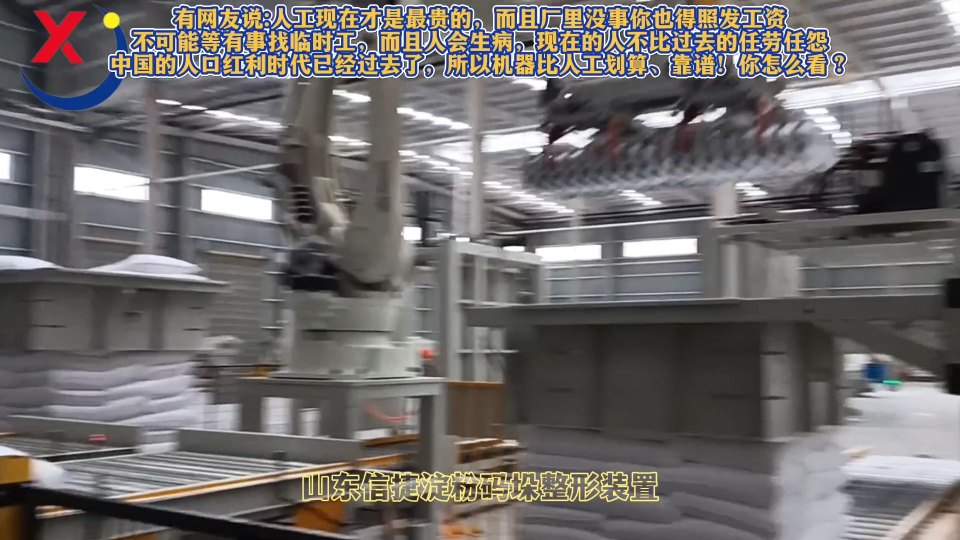
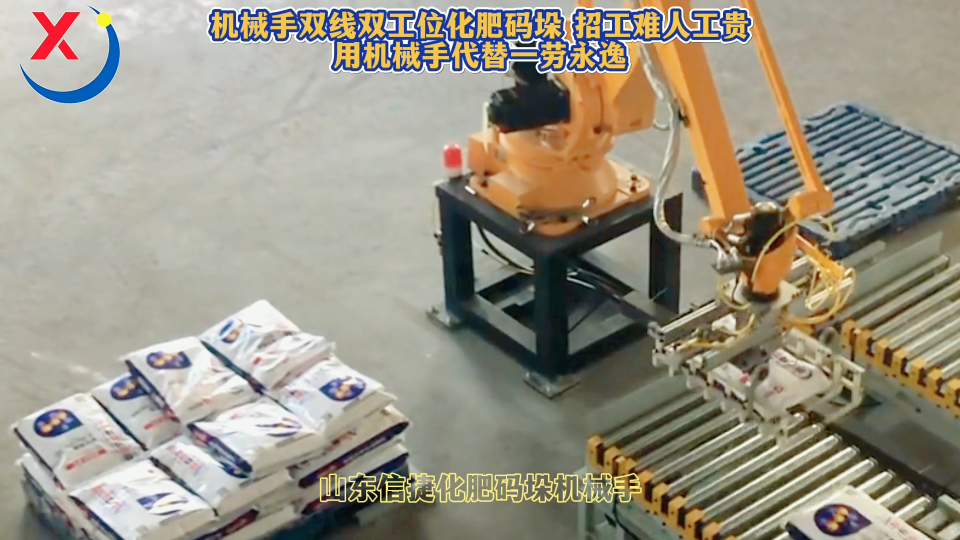
随着科技的不断发展,许多传统行业正在逐渐引入自动化技术,以提高生产效率和降低成本。面粉厂也不例外,其中码垛机械手作为一种自动化设备,已经逐渐成为面粉厂中不可或缺的一部分。本文将探讨面粉厂
2023-12-28 16:43:14139 ZR机械手:工业自动化的新选择-速程精密 随着工业自动化的不断发展,越来越多的企业开始寻求更高效、更精准的自动化解决方案。速程精密成功研发的ZR机械手,作为一种新型的工业自动化设备,正在成为许多企业
2023-12-19 18:16:03687 直线模组是一种常见的机械传动装置,广泛应用于机械手等自动化设备中,在机械手中的主要作用是实现机械手的运动控制和定位。 直线模组具有高精度、高可靠性的特点,可以满足坐标机械手对运动精度
2023-12-07 17:38:28
该系统可以实现机械手与现有的扫地机器人无缝集成,只需对真空机器人进行较少的改动即可轻松连接和拆卸机械手,并在不影响扫地机器人原始功能的基础上对进行更为广泛的功能扩展。
2023-11-16 10:40:19440 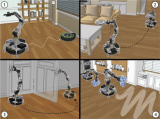
,当离心机发出用芯需求指令后,将根据指令信息,自动选取相应规格的砂芯,发送至该离心机运芯小车上。 为避免单机作业,铸造车间设置了2台桁架机器人。如按照常规方案,2套桁架机器人需设置滑车机构,大小车升降及手爪电机电源
2023-11-07 09:44:08149 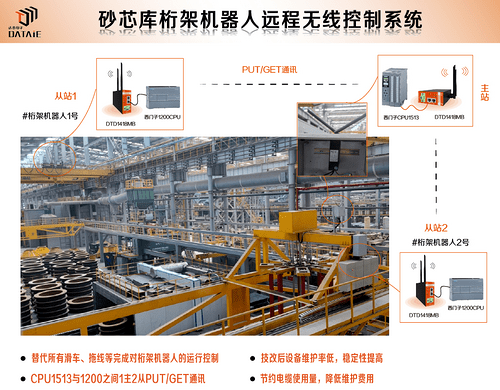
机器人编程需要什么软件
2023-11-01 07:34:30
触觉感知技术在人机交互领域具有重要价值。分布在软体机械手的触觉传感器能够在非结构化的场景交互中为人们提供多模态感知信息,如接触状态(稳态、滑动、扭转等)、表面特征(粗糙度、纹理、曲率等)、物理属性
2023-10-24 11:46:36305 
(形状、重量、刚度等),这些信息对于机器人与环境、环境与人、人与机器人的安全交互起到了至关重要的作用。具有触觉感知的软体机械手更加智能化,且更具安全性与灵活性,可在医疗、农业、军事等领域得到更广泛应用。
2023-10-18 10:35:04222 模板的尺寸直接决定了注塑机机械手的行程;安全门的高度关系到货物从模具内部顺利取出到模具外部的情况。在确定了这两个关键标准后,有必要考虑注塑机机械手的有效载荷是多少,以及它是否满足注塑制品的重量。之后
2023-10-18 08:07:45419 
报名地址点击报名
直播简介
1.了解机械手视觉引导的应用场景
2.了解scara机器人运动学正逆解
3.了解相机畸变矫正方法
4.了解手眼标定-9点标定方法
5.了解机械手旋转中心标定方法
6.了解
2023-10-17 15:37:40
触觉感知技术在人机交互领域具有重要价值。分布在软体机械手的触觉传感器能够在非结构化的场景交互中为人们提供多模态感知信息
2023-10-17 09:05:20467 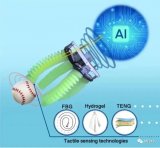
了进一步的发展和完善。近年来,国内外学者对自适应控制已做了卓越的研究工作,也取得了可喜的研究成果,有许多研究成果已经应用到生产实际中。
随着科学技术的发展和社会的进步,机器人的应用越来越普及,不仅广泛应用
2023-09-21 07:55:45
迈步手部康复外骨骼机器人,机器人可以带动手指完成两种康复运动——双向弯曲运动和内收外展运动。机器人可适应不同患者的手指尺寸,外骨骼手的长度可调节,长时间佩戴不会使患者产生疲劳感。手部康复外骨骼机器人
2023-09-20 17:38:02
, 采摘机器人结构简图如图1.3所示。主要研究了采摘机器人的全向移动底盘、机械手及其控制、视觉识别系统和整机的控制系统。
图1.2草莓采摘机器人系统框图
图1.3整机采摘机器人结构图
根据某
2023-08-16 17:35:54
直线模组在机械手中的应用
2023-08-04 17:48:22816 
全自动拆包机械手 常见的PP、PE、PVC塑料颗粒通常是由人工进行破包上料,为题升自动化水平减少人工成本,很多企业开始用拆包机械手进行这一作业,拆包机械手是由机器人拆垛系统、包装袋输送系统
2023-08-03 10:48:21364 
本论文根据机械手控制应用,设计了一套基于PLC基于PLC控制机械手控制设计。PL与数控技术、工业机器人并为工业自动化三大支柱,PLC既保留了原来可编程序逻辑控制器的所有优点,又吸收和发展了其他
2023-07-18 15:31:17 3
3 电子发烧友网站提供《如何制作无线/手势控制机械手.zip》资料免费下载
2023-07-10 15:04:421 全自动拆包机械手 全自动拆包机械手是由机器人拆垛机、皮带进料机、破袋装置、筛分装置、中间支架、收尘装置、螺旋输送机、控制箱七部分组成,它结构紧凑,精巧美观,操作简单方便,消耗功率小,安装快捷方便
2023-06-28 10:12:30156 节机械手或多自由度机器人,在工业生产 加工过程中通过自动控制来代替人类执行某些单调、频繁和重复的长时间作业,主要包括 焊接机器人、搬运机器人、码垛机器人、包装机器人、喷涂机器人、切割机器人和净室机 器人。工业机器人在机械结
2023-06-26 10:13:10276 
梳理、分析了核化工项目中各类机械手的工作原理和功能特点,并就各类机械手的适用场景进行了对比,介绍了在选择和设计机械手时需考虑的因素,总结了当前的研究进展和未来的发展趋势,以期为今后其他项目的机械手
2023-06-25 14:23:052141 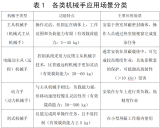
全自动破袋机械手,拆袋破袋机器人是全自动、智能化、一体化原料包装袋拆垛、拆包、回收、输送、除尘系统。除叉车上垛外,无需人工操作,它是由机械手抓手将要拆卸的物料袋抓取提升至割袋装置上方,由割刀装置
2023-06-24 15:32:26403 设计了一种窨井清挖机械手液压系统,首先拟定窨井清挖机械手液压系统原理图,该液压系统由定量泵、电磁溢流阀、电磁换向阀、液压锁、双单向节流阀、单向顺序阀、调速阀及液压缸等元件组成,液压系统每个支路独立动作实现机械手的工作循环;然后利用AMESim仿真软件对该液压系统进行仿真,验证了方案的可行性。
2023-06-15 14:12:27376 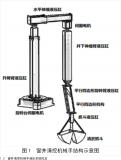
平面关节型机械手设
2023-05-29 11:11:330 电缆和软件也同样属于机器人的范畴。机械手是机器人机械系统主体。 它由众多活动的、相互连接在一起的关节 (轴)组成。 我们也称之为运动链。
2023-05-06 14:39:470 大家好,今天小阿畅为大家带来的是三菱PLC控制机械手的一个实例,快来一起看看吧!
2023-04-20 10:04:403969 泰科关节机器人具备哪些优势? 一、编程简单可以让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏
2023-04-19 15:13:28
深圳泰科智能TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作
2023-04-19 11:43:30
深圳泰科智能TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作
2023-04-19 11:39:15
深圳泰科智能TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作
2023-04-19 11:29:30
TB6-R3协作机器人是一款灵活的小型工业协作机器人,其精巧的机械结构设计,外形紧凑,能够适应狭小的工作空间,及高精密的工作任务需求;这款协作机器人自重仅为11.5KG,有效负载为3KG,工作半径达666mm,是轻型装配和高精度控制的理想选择。
2023-04-19 10:18:50
深圳泰科智能机器人TB6-R3协作机器人是一款灵活的小型工业协作机器人,其精巧的机械结构设计,外形紧凑,能够适应狭小的工作空间,及高精密的工作任务需求;这款协作机器人自重仅为11.5KG,有效负载为3KG,工作半径达666mm,是轻型装配和高精度控制的理想选择。
2023-04-19 10:13:59
TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作机器人功能强大、高自重负载比、高可靠性、模块化关节设计,易于末端扩展外部设备,可以实现快速安装部署。
2023-04-19 09:27:59
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。-
2023-04-19 09:22:29
TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产应用需求。模块化
2023-04-19 09:16:32
TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-17 17:57:19
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 16:12:03
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:57:13
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:15:06
什么是机器人机械原点?机械原点在哪里?
A:机器人六个伺服电机都有一个唯一固定的机械原点,错误的设定机器人机械原点将会
2023-04-11 10:17:311075 机器人视觉抓取的目的是使用一个机械手模型(包括二指或多指夹爪,吸盘等),以RGB或RGBD相机采集的场景图像为输入计算出一个最优的抓取位姿,使机械手在该位姿下可以稳定地抓取模型已知或未知的物体。
2023-03-30 10:19:29472 机器人的系统结构 一台通用的工业机器人,按其功能划分,一般由 3 个相互关连的部分组成:机械手总成、控制器、示教系统,如图 1 所示。
2023-03-24 10:22:452361 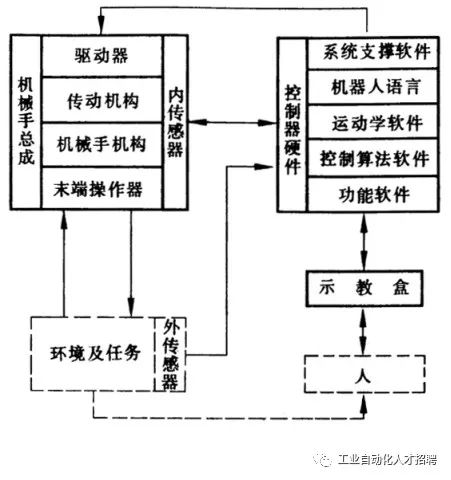
拆包机械手
2023-03-23 11:11:28355
 电子发烧友App
电子发烧友App














































 工商网监
工商网监
评论