 电子发烧友App
电子发烧友App


pcDuino9 AI视觉边缘计算开发套件开发使用分享
pcDuino9 AI视觉边缘计算开发套件是一款针对图像分析的开发套件,套件包含采用hi3516D方案的普通IPC和pcDuino9嵌入式AI视觉边缘计算模块。套件主要是通过pcDuino9嵌入式AI视觉边缘计算模块,来处理从hi3516D上获取的视频流,并对视频流进行一系列的分析处理。该套件为开发者搭建了基础开发环境,提供了由pcDuino9从hi3516D上获取的视频帧,开发者可在帧图上自由的实现各种图片开发,例如人脸检测、车牌检测、物体检测等AI图像分析处理功能。同时提供开放的API接口,开发者可以把在pcDuino9上处理完成的信息回传到hi3516D上,并可在hi3516D上对检测到的图片进行删选,然后通过FTP输出。
基本框架
已提供环境:
1. pcDuino9 从hi3516D获取视频帧
2. 把开发者分析处理后的信息回传到hi3516D上
3. 在hi3516D上对分析处理的图片进行质量筛选,选择质量优的图片通过FTP输出
开发举例:
1. 在pcDuino9上对帧图进行各种开发,如:人脸检测、车牌检测、物体检测等AI图像分析处理。
2. 开发者可对通过FTP输出的分析检测的图片进行其他应用上的使用
3. ………
开放SDK资料
1. 如何获取hi3516D视频帧?
HI3516将BT1120数据传输到PCDUINO 9。PCDUINO 9通过LT8918将BT1120数据转换成MIPI信号,然后接收。目前支持640x480 60fps帧数据传输。我们封装了协议层,使其类似于opencv样式。在读取帧数据时,我们将返回帧号,该帧号由3516传输,是用于数据交互的同步帧号。
#include
#include
#include "C4L2.hpp"
#include
using namespace std;
using namespace cv;
int main(int argc,char *argv[])
{
string dev = "/dev/video2";
C4L2Capture *cap = new C4L2Capture;
int ret = cap->initialzer(dev);
if(ret < 0)
{
cout << "C4L2Capture initialze failed... \n";
return -1;
}
Mat frame;
while(true)
{
unsigned int syn = 0;
cap->read(frame, syn);
if(frame.empty())
{
cout << "this frame is empty ...\n";
break;
}
cv::imshow("DeepCam LLC",frame);
cv::waitKey(10);
}
cap->destroy();
delete cap;
return 0;
}
2. 如何优化网络并运行物体检测?
PcDuino9有一个四核Cortex-A17 1.8GHz的CPU和一个ARM MALI-T764的GPU。如果您想在CPU上运行网络,可以参考NCNN;如果您想在GPU上运行网络,可以参考MACE。
CPU Benchmark:
物体检测:
#include
#include
#include
#include
#include
#include "net.h"
class Noop : public ncnn::Layer {};
DEFINE_LAYER_CREATOR(Noop)
struct Object
{
cv::Rect_<float> rect;
int label;
float prob;
};
static int detect_mobilenetv2(const cv::Mat& bgr, std::vector<Object>& objects)
{
ncnn::Net mobilenetv2;
mobilenetv2.register_custom_layer("Silence", Noop_layer_creator);
// original pretrained model from https://github.com/chuanqi305/MobileNetv2-SSDLite
// https://github.com/chuanqi305/MobileNetv2-
SSDLite/blob/master/ssdlite/voc/deploy.prototxt
mobilenetv2.load_param("mobilenetv2_ssdlite_voc.param");
mobilenetv2.load_model("mobilenetv2_ssdlite_voc.bin");
const int target_size = 300;
int img_w = bgr.cols;
int img_h = bgr.rows;
ncnn::Mat in = ncnn::Mat::from_pixels_resize(bgr.data, ncnn::Mat::PIXEL_BGR,
bgr.cols, bgr.rows, target_size, target_size);
const float mean_vals[3] = {127.5f, 127.5f, 127.5f};
const float norm_vals[3] = {1.0/127.5,1.0/127.5,1.0/127.5};
in.substract_mean_normalize(mean_vals, norm_vals);
ncnn::Extractor ex = mobilenetv2.create_extractor();
ex.set_light_mode(true);
ex.set_num_threads(4);
ex.input("data", in);
ncnn::Mat out;
ex.extract("detection_out",out);
// printf("%d %d %d\n", out.w, out.h, out.c);
objects.clear();
for (int i=0; i<out.h; i++)
{
const float* values = out.row(i);
Object object;
object.label = values[0];
object.prob = values[1];
object.rect.x = values[2] * img_w;
object.rect.y = values[3] * img_h;
object.rect.width = values[4] * img_w - object.rect.x;
object.rect.height = values[5] * img_h - object.rect.y;
objects.push_back(object);
}
return 0;
}
static void draw_objects(const cv::Mat& bgr, const std::vector<Object>& objects)
{
static const char* class_names[] = {"background",
"aeroplane", "bicycle", "bird", "boat",
"bottle", "bus", "car", "cat", "chair",
"cow", "diningtable", "dog", "horse",
"motorbike", "person", "pottedplant",
"sheep", "sofa", "train", "tvmonitor"};
cv::Mat image = bgr.clone();
for (size_t i = 0; i < objects.size(); i++)
{
const Object& obj = objects[i];
fprintf(stderr, "%d = %.5f at %.2f %.2f %.2f x %.2f\n", obj.label, obj.prob,
obj.rect.x, obj.rect.y, obj.rect.width, obj.rect.height);
cv::rectangle(image, obj.rect, cv::Scalar(255, 0, 0));
char text[256];
sprintf(text, "%s %.1f%%", class_names[obj.label], obj.prob * 100);
int baseLine = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1,
&baseLine);
int x = obj.rect.x;
int y = obj.rect.y - label_size.height - baseLine;
if (y < 0)
y = 0;
if (x + label_size.width > image.cols)
x = image.cols - label_size.width;
cv::rectangle(image, cv::Rect(cv::Point(x, y),
cv::Size(label_size.width, label_size.height +
baseLine)),
cv::Scalar(255, 255, 255), CV_FILLED);
cv::putText(image, text, cv::Point(x, y + label_size.height),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
}
cv::imshow("image", image);
cv::waitKey(0);
}
int main(int argc, char** argv)
{
if (argc != 2)
{
fprintf(stderr, "Usage: %s [imagepath]\n", argv[0]);
return -1;
}
const char* imagepath = argv[1];
cv::Mat m = cv::imread(imagepath, CV_LOAD_IMAGE_COLOR);
if (m.empty())
{
fprintf(stderr, "cv::imread %s failed\n", imagepath);
return -1;
}
std::vector<Object> objects;
detect_mobilenetv2(m, objects);
draw_objects(m, objects);
return 0;
}
3. 如何和IPC通信?
我们提供一个开放式API接口。开发人员可以将pcDuino9上处理的信息返回到HI3516D,在HI3516D上对检测到的图像进行优化选择,然后通过ftp输出。
#include
#include "json/json.h"
#include "spi_slave.hpp"
using namespace std;
struct DetectInfo
{
int ID; //tracker ID
int x; // bbox left top x
int y; // bbox left top y
int w; // bbox width
int h; // bbox height;
int syn; // sync frame count
int quality; // object quality (0 -- 100)
int confidence; // object confidence (0 -- 100)
};
void detect_out(std::vector<DetectInfo> &detectBoxs, std::string &message)
{
Json::Value root;
Json::Value faces;
Json::FastWriter writer;
for(int i = 0; i < detectBoxs.size(); i++)
{
Json::Value face;
face["x"] = detectBoxs[i].x;
face["y"] = detectBoxs[i].y;
face["w"] = detectBoxs[i].w;
face["h"] = detectBoxs[i].h;
face["id"] = detectBoxs[i].ID;
face["s"] = detectBoxs[i].ID;
face["q"] = detectBoxs[i].quality;
face["c"] = detectBoxs[i].confidence;
faces.append(face);
}
root["faces"] = faces;
message = writer.write(root);
}
int main(int argc, char *argv[])
{
unsigned char SOF;
spi_slave *rk3288_spi = new spi_slave;
if(rk3288_spi->init() < 0)
{
printf("spi test spi_init error.\n");
return -1;
}
unsigned char *r_buf = new unsigned char[MAX_DATA_LENGTH];
unsigned char *w_buf = new unsigned char[MAX_DATA_LENGTH];
while (true)
{
std::string message;
std::vector<DetectInfo> detectBoxs;
//Do object detect get message
detect_out(detectBoxs, message);
SOF = 0;
memset(r_buf, 0, MAX_DATA_LENGTH);
strcpy((char *)w_buf,message.c_str());
int ret = rk3288_spi->spi_slave_xfer(r_buf,MAX_DATA_LENGTH, w_buf,
MAX_DATA_LENGTH, &SOF);
if(ret > 0 )
{
memset(w_buf, 0, MAX_DATA_LENGTH);
if(SPI_M_TX == SOF)
{
std::cout << "recv : " << r_buf << std::endl;
usleep(30000);
}
}
else
{
std::cout << "get message failed!\n";
break;
}
}
return 0;
}
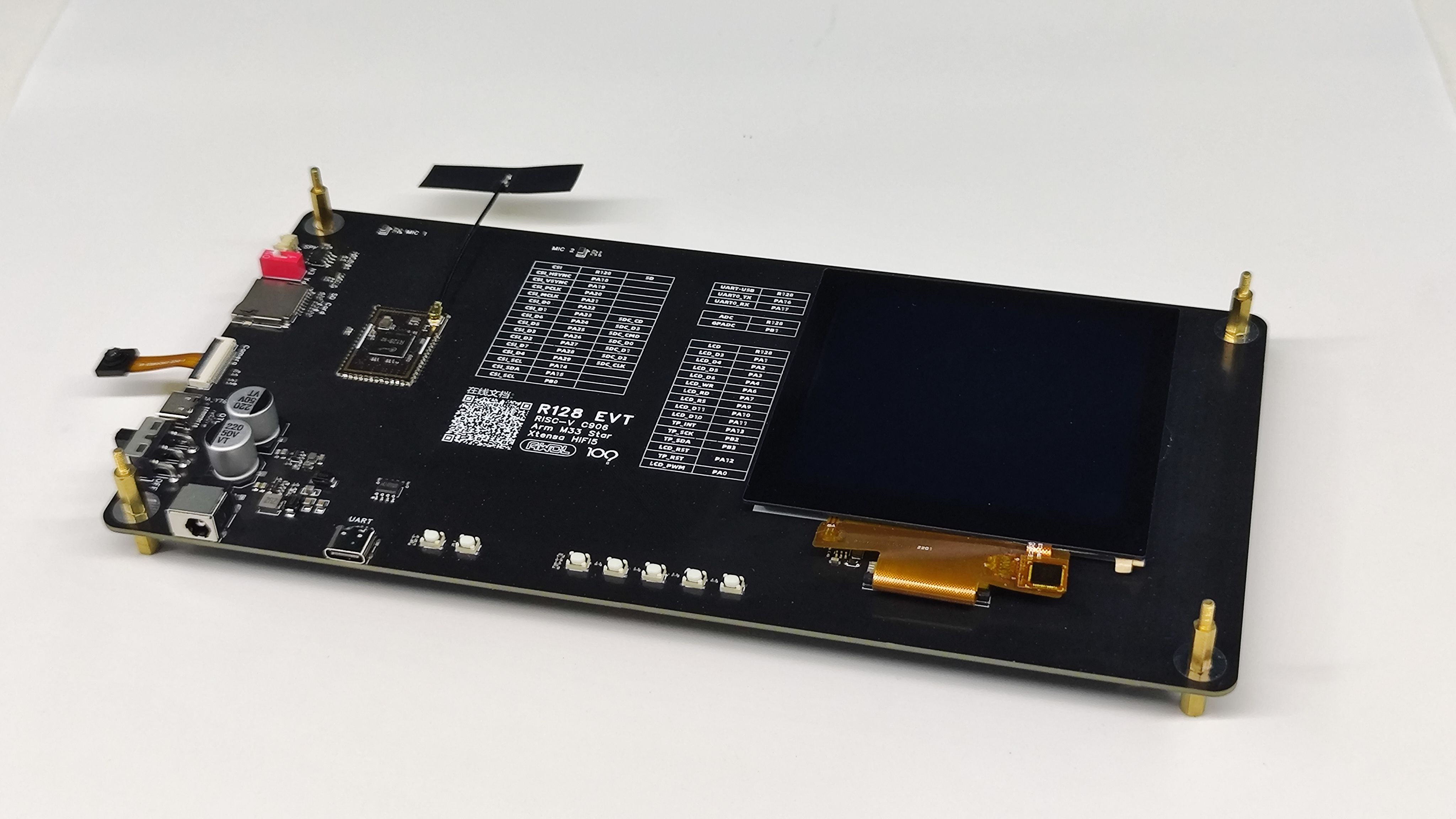
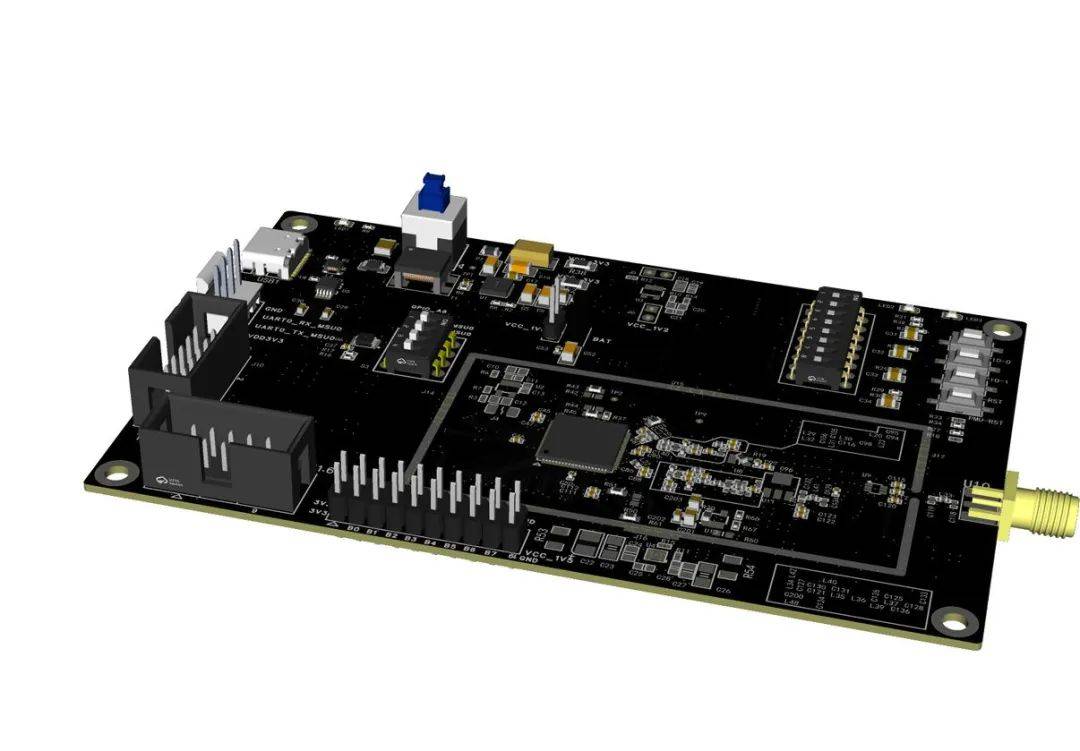
硬件介绍
pcDuino9嵌入式AI视觉边缘计算模块介绍
接口图
引脚图
原文链接:
http://linksprite.com/wiki/index.php?title=PcDuino9_AI_visual_edge_computing_development_kit


















 工商网监
工商网监
评论