作台,通过机器视觉对电池串进行整版定位纠偏操作,保证焊接的准确性。随后,通过焊接带(汇流带)将这些电池串相互连接,在这步骤中,焊枪分别在电池串两侧延伸末端的方向进行焊接,实现电池串之间的电流汇集,形成完整
2024-02-28 15:01:45
和工艺可实现独立电子控制的折纸三维软体机器人、爬行软体机器人以及柔性抓取器等。
测试设备:所需的设备主要包括MC-3020激光切割机(铭创)、亚克力四向拉伸机构、高压电源(Aigtek)、信号源
2024-02-27 17:15:22
的核心标准。 目前主流的扫地机器人导航避障技术路径为双目视觉、激光雷达、3D结构光(线激光)三条,每条技术路径都存在着各自的特点。 视觉方案 扫地机器人所配备的视觉避障技术通常采用双目摄像头,依据三角测量原理,通
2024-02-01 16:01:00 210
210 富唯智能移动机器人是一款拥有自主导航能力和物料转移抓取功能的智能机器人,采用先进的无线通信技术和高精度传感器,能够实现自主导航和避障,完成生产线上的物料转运任务,并与其他设备实现无缝对接。此外
2024-01-17 11:58:36118 、GNSS RTK传感器组合和自主导航 SLAM 技术组成)、以计算机视觉为主的VSLAM技术、人工智能视频分析技术和网络传输、云平台管控相关技术。尤其是5G应用逐渐开始商用,将来智能巡检机器人借助5G
2024-01-14 21:56:23
产品特点1、适合于大幅面空间焊接,机器人智能化操作,灵活可靠,可以六轴联动,可任意空间焊接,不局限于平面焊接;2、可以根据生产需求而定制夹具;3、实现双工位或多工位焊接操作,节省产品安装夹具时间
2024-01-04 13:57:58
机器人的智能化程度影响着整个工业演化的进程,传统的机器人仅能在严格定义的结构化环境中执行预定指令动作,在部分行业实际应用中,无法突破环境局限,使得末端定位精准度无法达到预期要求,这极大地限制了机器人的应用与发展。
2023-12-25 17:56:25196 
。LabVIEW的可视化编程环境和强大的数据处理能力,使得复杂的运动学算法和轨迹规划得以顺利实现,显著提高了工业机器人的控制精度和效率。
这是LabVIEW的一个功能介绍,更多的使用方法与开发案例,欢迎登录官网,了解更多信息。有需要LabVIEW项目合作开发,请与我们联系。
2023-12-21 20:03:18
近日, 搭载KaihongOS的“夸父”人形机器人通过OpenAtom OpenHarmony(以下简称“OpenHarmony”)3.2 Release版本兼容性测评并获颁兼容性证书 。这体现了
2023-12-20 09:31:19
自动移液机器人, 全自动移液工作站在生物医学研究、化学实验以及临床诊断等众多领域,精确且高效的液体处理能力至关重要。而近年来,随着科技的飞速发展,一种名为“自动移液机器人”的设备应运而生,不仅
2023-12-06 11:21:24
本篇文章主要分析,常规的ROS机器人是如何使用Navigation导航包实现实时定位的,定位精度的决定性因素等内容,结构上分为详细介绍、概括总结、深入思考三大部分。
2023-12-03 11:00:401122 
领域的集大成者,主要应用于机器人控制领域,如AGV工业机器人控制器、智能机械臂控制器、机器人导航系统等。
ROS系统主要特点有哪些
(1) 提供丰富的机器人算法库机器人的各种控制以及通信离不开算法
2023-11-30 16:01:01
不可置否,激光雷达已经成为扫地机器人的“耶路撒冷”。
2023-11-23 14:49:20455 pic单片机做扫地机器人有什么优势
2023-11-09 07:24:46
视觉识别领域有许多新的应用。比如自动驾驶。我们机器人比赛做巡线如果用视觉,就比较可靠。不知道谁有这方面的经验,推荐一个好用的主板及方案。
2023-11-08 07:43:09
在某车厂汽车生产线上,需要将西门子1200PLC与海康机器人SC2000系列视觉传感器,顺畅连接,工程师现场添加了Modbus TCP转Profinet网关,实现了PLC和视觉传感器之间的通讯
2023-11-07 11:20:38
机器人编程需要什么软件
2023-11-01 07:34:30
电子发烧友网站提供《基于GPS的自主移动机器人导航定位系统的实现.pdf》资料免费下载
2023-10-25 11:23:40 0
0 我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
2023-10-21 20:59:28
在激光焊接过程中,利用机器视觉定位,提供定位参数,实现精准定位,引导机器人进行高精度的激光焊接,在有效提高焊接质量的同时,也能够帮助实现连续的精准操作,提高工作效率,节省系统成本。
2023-10-21 17:00:47318 
前言 Athena 2.0是思岚研发的搭载全新的SLAM自主定位导航系统及激光视觉多重导航方案,能够自主上下电梯,实现多楼层之间自主移动的智能机器人底盘。 Athena2.0智能机器人底盘
2023-10-13 09:21:32720 上篇,小岚为大家介绍了slamware自主定位导航解决方案在移动生态、开发便利性、智能性上探索的成果,那背后到底是哪些关键技术在赋能呢? 机器人在未知场景中,要想实现类人般的智能移动,必须要具备地图
2023-10-11 16:07:00584 
教你用Arduino让机器人学会识别标识并作出行为。你的人工智能小车从此有了眼睛!材料单:跟踪机器人底盘视觉传感器Arduino Uno电动机驱动板18650 Li-离子电池
2023-09-27 07:36:55
本文档的主要内容详细介绍的是Arduino教学机器人的使用教程
2023-09-27 06:53:26
由于视觉导航技术的应用越来越普及 ,因此 ,有必要对视觉导航中的关键技术及应用进行研究。文章对其中的图像处理技术和定位与跟踪技术进行了详细研究 ,并与此相对应 ,介绍的相关的应用。
2023-09-25 08:09:38
平台A TRV 22 上的实验结果表明 , 该视觉导航系统能够实时理解结构化道路环境 , 并且能够控制机器人沿着合理路径行驶.
2023-09-25 07:23:39
电动轮椅,融合多种领域的研究,包括机器视觉,机器人导航和定位.模式识别,多传感器融合及用户接口等。目前美国、德国.日本、及中国等多个国家都在进行这方面的研究。
轮椅的安全导航,是智能轮椅要解决的中心
2023-09-25 07:13:35
苏州镭拓激光科技有限公司设计制造的机器人激光焊接机具有以下的特点能够适应各种复杂场景下的焊接需求;焊接品质高,焊接一致性高;热影响区小,焊接变形量小;可根据应用续期,定制夹具;焊接消耗小,节能环保
2023-09-22 10:08:29
运输过程中带来的产品的损坏,突破了产品生产效率和产能瓶颈。”
稳石机器人为全球知名日化企业打造自动化上下料解决方案。产线利用稳石机器人提供的先进技术,实现了自动化的物料搬运、分类和分拣等功能,使生产线
2023-09-21 13:45:14
的运营成本、人力成本还在不断提高(如:办公场地的租金、员工的工资、社保公积金、节假日福利等)。
如今的智能电话机器人,每天的电话拨打量可达800-1000通,相比人工提高了3-5倍,大大缩短了名单的筛选
2023-09-21 11:09:59
迈步手部康复外骨骼机器人,机器人可以带动手指完成两种康复运动——双向弯曲运动和内收外展运动。机器人可适应不同患者的手指尺寸,外骨骼手的长度可调节,长时间佩戴不会使患者产生疲劳感。手部康复外骨骼机器人
2023-09-20 17:38:02
下肢外骨骼康复机器人BEAR-A1利用仿生学、人体工学、机器人技术,为下肢运动功能障碍者提供康复训练。通过对患者髋、膝关节提供助力完成康复训练,可以有效降低治疗师工作强度,提高康复训练效率,提高患者
2023-09-20 17:31:33
迈步机器人BEAR-H系列是用于辅助脑卒中患者步态康复训练的新型可穿戴式下肢外骨骼机器人。机器人拥有主动被动训练模式,通过对患者髋、膝、踝关节提供助力完成行走训练,可以节省人力,并提高康复效果
2023-09-20 17:25:48
利用 Matlab 建立移动机器人的动力学模型 ,在虚拟现实 (VR )环境下 ,实时仿真移动机器人路径跟踪的运动特性 ,为基于 Internet 的机器人遥操作试验搭建了仿真平台 。 实验结果表明
2023-09-20 06:24:09
产品介绍小安值班机器人是集电力监控系统、动环辅控系统、巡检机器人“三合一"功能产品,在自学习算法和大数据的加持下,具备强大的AI能力,可实现配电室的数字化及无人值守。 特色功能全感知电力
2023-08-22 14:57:47
采摘耗时长成本大的问题,提出了一种全向移动的草莓采摘机器人系统方案。
系统的硬件电路主要包括以STM32F407ZGT6为核心的主控制器、电源电路、WIFI模块、激光测距单元、电机驱动模块。系统
2023-08-16 17:35:54
正如图中所示,机器人自主定位导航技术中包括:定位和地图创建(SLAM)与路径规划和运动控制两个部分,而SLAM本身只是完成机器人的定位和地图创建,二者有所区别。
2023-08-03 11:12:00697 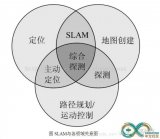
机器视觉和自动化的进步,正在帮助制造企业更好地利用自主移动机器人、深度学习等技术的发展,改善其物流和仓储运营。
2023-07-21 09:22:45522 定位在移动机器人导航系统中起着至关重要的作用,是自主移动的基本能力。在室内环境中,当前主流的定位方案使用2D激光雷达,利用即时定位和建图(SLAM)技术来构建占据栅格地图;然后,基于已知的地图来定位。
2023-07-12 10:48:55349 
雷达毫无疑问是“万众优选”。 01 . LR-16F+VFD1-20 清洁机器人应用案例 使用场景: 欧镭激光LR-16F,3D 360° 多线 激光雷达,广泛应用于商业清洁、酒店配送、送餐、巡检等商用服务机器人平台。基于领先的传感技术,集成了导航定位、图像识
2023-07-12 08:38:55454 
FRC5000系列叉式移动机器人控制器,适用各类常见的叉式移动机器人,内置激光导航算法,支持单舵轮、双舵轮底盘运动模型。FRC5000系列自带丰富的I/O资源和各种通讯接口,支持CANopen
2023-07-11 10:26:45
MRC3100系列AMR移动机器人控制器,适用潜伏顶升式、协作(复合)式、辊筒式等差速底盘类型移动机器人,内置激光导航及二维码导航算法,支持差速底盘运动模型。MRC3100系列自带丰富的I/O资源
2023-07-11 10:12:02
边界、定位和导航问题的解决,是所有机器人工作的基础保障。搭载氪见高精度激光雷达,机器人可以向外界发射红外线光源,每秒可输出14.4k-28.8k的点云数据。
2023-07-04 11:29:49373 ,可以靠视觉导引、定位,成为夹取物件的要件。除了视觉定位,手眼力协调机器人的关键技术还有矩阵的感测器,可以协助机器人知道抓取的位置与力量大小。 2.电子焊接制造 在焊线技术中,因为芯片维度的缩小,需要较强大的影像放大功能
2023-06-29 11:35:27705 ,施工较为方方便,能够适应各种使用环境。
02二维码导航
二维码导航属于视觉识别,实现原理是在地面铺设二维码阵列,通过移动机器人(AGV/AMR)下方的相机扫描二维码实现机器人的定位。
**二维码导航优点
2023-06-28 09:52:41
,就需要解决环境感知、地图创建、自主定位、运动规划等一系列核心问题,也就是移动机器人车载内算法的解决。移动机器人 内部算法主要包括导航算法及运动控制算法 。导航算法是指移动机器人在未知环境中通过
2023-06-28 09:36:32
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。基于整个智能制造的发展,移动机器人
2023-06-21 17:29:16867 
不要被复杂的生产线吓倒,生产线可以看成多个单独的设备或机器人,每部分完成一个功能。
2023-06-08 17:40:58
自编程是如何完成的。
自编程其实也不是很高深的问题。
当用户给出参数时,有时也包括逻辑。
例如用户说,如果设备打开完毕,执行一个命令。
这个例子就包括了一个如果。你的智能机器人只需要生成一个
2023-06-08 16:20:45
机器人也是一种设备,它主要内容是完成一个制造的其中一个功能。
制造一个产品,可以分为几个部件。和装配几个部件。
一个部件,可以是一个模具。或者由机器人完成组成一个模具。
机器人主要完成的是一些模具
2023-06-06 16:18:33
在Eye-to-Hand系统中,视觉成像单元安装在机器人本体外的固定位置,在机器人工作过程中不随机器人一起运动,当机器人或目标运动到机械臂可操作的范围时,机械臂在视觉感知信息的反馈控制下,向目标移动,对目标进行精准操控。
2023-06-06 14:44:59892 
激光机器人是指搭载激光器的机器人,利用激光器所输出的高能量激光束进行各种加工或处理操作。
2023-06-05 09:08:45420 机器视觉检测与机器视觉定位是两种重要的机器视觉应用技术,主要区别在于检测对象和应用领域不同。机器视觉检测技术可以用于检测产品的外观、尺寸、密封性、移动对象、颜色缺陷、形状缺陷等,广泛应用于工业、医疗
2023-05-30 17:10:33681 我正在开发一些 WSN 机器人,
我现在正在使用 2 个 ESP8266,一个充当 WSN 传感器节点,另一个充当机器人节点,
机器人在从其他 WSN 传感器节点获取数据时正在工作(现在亮起LED
2023-05-22 09:55:59
模型要具备齿轮,导轨几种基本的运动原理。
要分辨基本图形,视觉模型要能分辨圆形,方形和三角形。
有了这两点,机器人就基本上能计算开模和注塑这种简单的工作了。要替代人类的工作,还要进一步学习。
2023-05-19 20:40:25
儿童陪护机器人越来越受到人们的关注,其中转动控制是其重要组成部分之一。步进电机芯片作为一种常用的控制芯片,被广泛应用于儿童陪护机器人中的转动控制。本文将从步进电机芯片的工作原理、优势和应用场景等方面
2023-05-11 15:12:45
对于一台激光导航扫地机器人而言,全天候作业并非难事,那么纯视觉导航扫地机器人能做到吗? 无论对于人,还是机器人,光线环境的变化对“眼睛”的影响都是致命的。由于视觉传感器对于光线十分敏感,在家庭场景
2023-04-28 11:05:24618 
机器人关节电机是专业为机器人关节设计研发生产。电机既有中空大孔径,能保证关节模组完美融合的组合, 电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列电机转矩脉动极低,易于速度控制和精确定位
2023-04-20 10:07:10
机器人研究的核心就是:导航定位、路径规划、避障、多传感器融合。定位技术有几种,不关心,只关心视觉的。
2023-04-20 09:57:33919 产品方向,自由定位。开放友好,操作便捷• 模块化设计、紧凑型的新一代关节模组,其重量、尺寸、安装方式、外观等相对RJS系列作了大幅优化• 为客户后期生产的关节机器人
2023-04-19 15:23:14
泰科关节机器人具备哪些优势? 一、编程简单可以让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏
2023-04-19 15:13:28
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 15:03:00
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 14:54:26
深圳泰科智能TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作
2023-04-19 11:43:30
深圳泰科智能TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作
2023-04-19 11:39:15
深圳泰科智能TA6系列协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足
2023-04-19 11:14:26
为了让高尔夫球员们可以更好地享受运动,解放双手,这款高尔夫机器人配备了思岚的激光雷达,通过获取物体位置和距离信息,结合机器人的视觉算法提来识别用户的位置,从而实现自主跟随功能。
2023-04-19 11:06:131048 TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-19 10:58:47
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:53:03
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:48:11
,让机器人开发更自由高精度绝对值编码器,精准控制运动轨迹,多圈绝对值编码器分辨率标配16单圈和16多圈,保障机器人定位更精准、运行轨迹的稳定性更好减少机器人开发过程
2023-04-19 10:40:37
TB6-R3协作机器人是一款灵活的小型工业协作机器人,其精巧的机械结构设计,外形紧凑,能够适应狭小的工作空间,及高精密的工作任务需求;这款协作机器人自重仅为11.5KG,有效负载为3KG,工作半径达666mm,是轻型装配和高精度控制的理想选择。
2023-04-19 10:18:50
TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作机器人功能强大、高自重负载比、高可靠性、模块化关节设计,易于末端扩展外部设备,可以实现快速安装部署。
2023-04-19 09:27:59
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。-
2023-04-19 09:22:29
TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产应用需求。模块化
2023-04-19 09:16:32
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 08:48:46
机器人关节电机是专业为机器人关节设计研发生产。电机既有中空大孔径,能保证关节模组完美融合的组合, 电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列电机转矩脉动极低,易于速度控制和精确定位
2023-04-18 17:35:19
产品优势专注机器人关节研发,RJS系列关节模组具有定位精度高、性能可靠等特点。 模块化设计RJS关节模组集成无框电机、驱动器、谐波减速器、编码器、制动器于一体,结构小巧紧凑,6轴RJS关节
2023-04-18 14:04:34
,让机器人开发更自由高精度绝对值编码器,精准控制运动轨迹,多圈绝对值编码器分辨率标配16单圈和16多圈,保障机器人定位更精准、运行轨迹的稳定性更好减少机器人开发过程
2023-04-17 18:01:33
TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-17 17:49:50
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 17:40:55
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。
2023-04-17 16:36:37
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 16:25:29
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 16:12:03
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:57:13
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C
2023-04-17 15:49:48
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C
2023-04-17 15:40:56
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:31:15
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:25:07
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:15:06
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:07:26
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:02:00
口上面,当机器人开始加水时,传感器会检测水位并将数据发送到一个微处理器。微处理器会根据清水箱的容量,来判断是否需要再次填充水。如果水位已满,机器人将停止加水。污水箱中也有水位传感器,但这个传感器测量
2023-04-15 11:21:46
,越来越多的管道被铺设在地下,如此大面积的地下管廊该如何快速而精准的维护呢?考虑到地下管廊环境复杂并且具有一定的危险性,地下空间智能巡检机器人便应运而生,可以为地下管廊加装智能机器人巡检监测系统和处置系统
2023-04-12 15:49:23
 电子发烧友App
电子发烧友App











 工商网监
工商网监
评论