物联网开发过程中遇到的棘手问题是:如何让设备连接上云?设备接入主要是开发者要实现设备与云平台进行连接、数据上报/透传、命令控制等过程。接入云平台的设备一般分为两类:第一类:设备具备联网能力,并且支持
2024-03-05 08:24:40 74
74 
SDK 是 3.6 版,不支持 CYPD6127 部件。
那么,我能在 Meteor Lake 平台上使用 SDK 3.5 吗?
SDK 3.5 - 平台选择有"MTL" 关键字 :
2024-03-04 06:32:32
请问一下,百度文库资料里面,下图所示的系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?与前面4GB版本的镜像有什么区别?
2024-03-01 23:06:01
更新SDK后提示 “@ohos.application.Ability”/“@ohos.application.AbilityStage”等模块找不到或者无相关类型声明
问题现象
更新SDK后报错
2024-02-18 17:17:18
现在。直接买100开发板,别买101模组,除非你有别的爱好。
05.其他
其实目前的模组还有很多,前端时间只要注册个人小米开发者,送一块小米的WIFI开发板,支持小米的SDK开发,就是连接到小米平台
2024-02-07 17:56:44
的核心标准。 目前主流的扫地机器人导航避障技术路径为双目视觉、激光雷达、3D结构光(线激光)三条,每条技术路径都存在着各自的特点。 视觉方案 扫地机器人所配备的视觉避障技术通常采用双目摄像头,依据三角测量原理,通
2024-02-01 16:01:00210 设置ROS环境变量是使用ROS的重要步骤之一。本文将详细介绍如何设置ROS环境变量,包括什么是环境变量、为什么要设置ROS环境变量、如何设置ROS环境变量等。 什么是环境变量 环境变量是一种操作系统
2023-12-28 13:52:42295 挑战,包括激光雷达、单目测距和双目视觉技术等。在当前的高级辅助驾驶技术(ADAS)中,双目视觉技术在距离检测方面表现出色,它可以精确地测量物体的距离,提供更客观的数据。
为了应对这一需求,设计了一种
2023-12-19 18:02:07
双目测宽仪是基于机器视觉原理及模拟人的双眼进行宽度尺寸自动测量的仪器,是一种高度自动化的工业实时在线宽度检测仪表。
双目测宽仪是一种智能化的全自动工业在线实时宽度检测设备,两个工业相机就像人的双眼
2023-12-04 17:10:35
1.添加ROS软件源 将下面这条命令复制到ubuntu的终端执行 sudo sh -c '. /etc/lsb-release echo "deb http
2023-12-01 16:14:26317 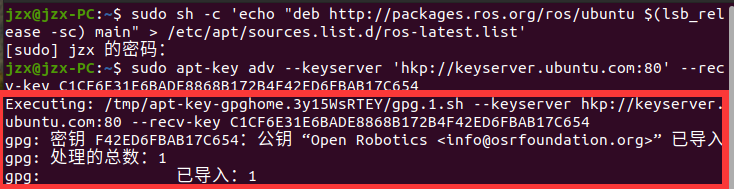
安装ROS2功能包 接下来,还有一个很重要的配置,那就是安装ROS2功能包,我们说TogetherROS是基于ROS2深度优化的,很多模块还是会复用ROS2中的功能,所有ROS2的原生功能也可以支持
2023-12-01 16:02:24326 
特定硬件加速器优化的数据格式进行工作。经过适配的类型用于处理图形,以消除 CPU 和内存加速器之间的内存拷贝。 通过 类型协商 ,处理图中的不同 ROS 节点可以公布其支持的类型,ROS 框架也可以选择
2023-11-30 19:35:01254 
库的支持,ROS系统提供丰富且功能强大的机器人算法库,如坐标变换、运动控制等。机器人开发者可根据开发需要,简单快捷地调用合适的算法库,以提高开发效率,加快开发进程。
(2) 开源免费,架构精简ROS系统
2023-11-30 16:01:01
双目测宽仪是机器视觉原来制造而成的智能宽度检测设备,广泛应用于板材类产品的宽度检测。通过测宽仪的使用,实时了解产品宽度品质,进行超差提示,减少废品的生产。
双目测宽仪优势
测量软件界面显示:产品规格
2023-11-28 17:13:06
如果你是一个ROS2的开发者,可能对刚才我们使用的ROS2命令比较熟悉,这时你可能也会产生一个问题:我们之前也安装了ROS2系统,那ROS2的原生功能还可以正常运行么? 我们再来试一试ROS2中自带
2023-11-28 16:29:18327 
ros1: talker 注册 listener 注册 ROS Master 进行信息匹配 listener 发送链接请求 talker 确认请求 建立连接 talker 给 listener
2023-11-27 11:26:02266 
基本概念: ROS是一个用于在不同进程间匿名的发布、订阅、传递信息的中间件。 ROS2系统的核心部分是ROS网络(ROS Graph)。 ROS网络是指在ROS系统中不同的节点间相互通信的连接
2023-11-27 11:21:15782 配置ROS驱动功能包 将WHEELTEC 100N的 ROS_SDK 保存在工作空间的src文件夹下。 通过 catkin_make 进行编译。 刚装的ros环境会报错,如下: Make Error
2023-11-22 18:13:34512 
TF命令行操作 ROS中的TF该如何使用呢?我们先通过两只小海龟的示例,了解下基于坐标系的一种机器人跟随算法。 小海龟跟随例程 这个示例需要我们先安装相应的功能包,然后就可以通过一个launch文件
2023-11-22 17:24:14240 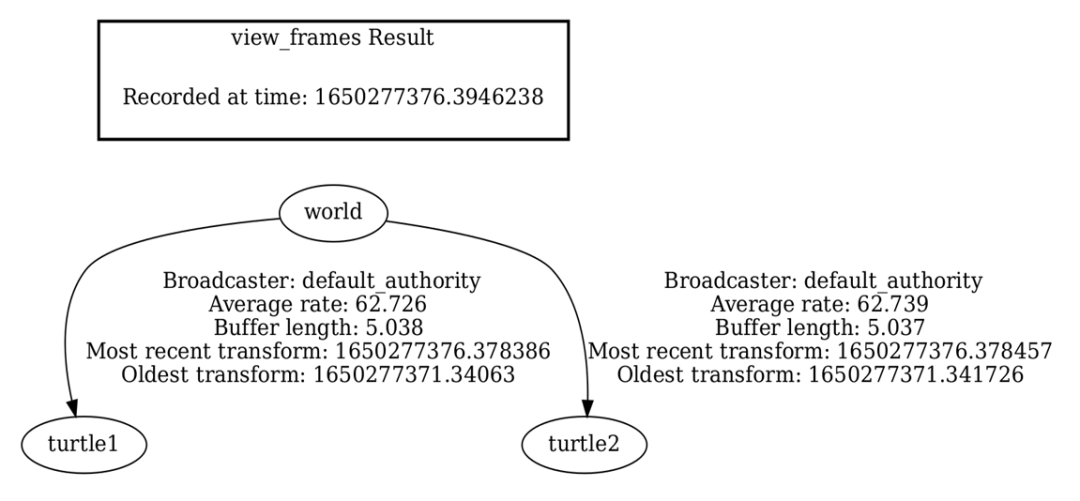
ROS的扩展 ROS除了本身框架性的东西以外,最大的特色就是能融合很多其他的东西,形成一个机器人开发生态圈,难怪ROS名为机器人操作系统,使命是powering the world‘s robots
2023-11-21 18:12:20321 ROS核心框架 对于第一个问题,我也没仔细研究过源码,核心代码基本由python和C++组成,运用了xmlrpc机制,每个运行的节点可以理解成一个进程。进程间通讯有些是共享内存的方式(比如
2023-11-21 18:07:24388 
相机就像人的双眼,可以形成立体视觉,这样就可以得到足够的信息判断被测物的距离,修正和消除距离变化对测量的影响。
双目测宽仪是新研发的一种宽度检测设备,采用立体机器视觉原理检测,利用算法消除倾斜等
2023-11-20 17:25:38
连接到主机处理器。各项功能由相应的SDK 支持,该模组已适配OPEN CV 开发环境,并有各个摄像头之间内外参完整标定数据源,用户可以轻松地利用OPEN CV 开
2023-11-17 17:55:38
对于ROS而言,其最常用的就是Topic话题以及Service两个了。之前我们在了解Unity Robotics Hub时候就了解到基本的Unity和ROS的通讯,下面我们来详细介绍一下Unity
2023-11-17 17:22:25279 
Simulink对机器人操作系统(ROS)的支持使我们能够创建与ROS网络一起工作的Simulink模型。ROS是一个通信层,允许机器人系统的不同组件以消息的形式交换信息。 组件通过将消息发布到特定
2023-11-15 17:26:46224 
前言:一直都觉得ROS很神秘,到底是个操作系统,仅凭称呼就让我望而却步了。但ROS和自动驾驶仿真有着千丝万缕的联系,作为仿真软件和智驾算法的数据桥梁,ROS是个绕不开的话题,所以还是得硬着头皮啃一啃。然后用大白话讲给你听,最好再做两个小栗子,那可真是功德无量了。
2023-11-15 12:42:031511 
OneNET的NB模组用AT指令怎么连上ONENET平台?
2023-11-01 06:05:16
现在市面上最常见的还是USB摄像头,物美价廉,要想使USB摄像头在ROS下正常工作,我们就需要一个软件包来支持,现在ROS下最常用的usb摄像头软件包就是usb_cam了,简单理解该软件包就是V4L(Video for Linux)USB摄像头驱动在ROS在的一个移植版本。
2023-10-29 11:26:29313 
paddle_inference_ros_demo功能包是基于paddle_inference_ros开发的,帮助开发者快速体验paddle_inference在ROS环境下的推理部署效果的功能包。可以直接进入该项目链接进行查看和快速体验。
2023-10-20 17:02:07265 
【KV260视觉入门套件试用体验】四、KV260 视觉入门套件和固件更新
一、KV260 视觉 AI 入门套件
Xilinx® Kria™ KV260 视觉 AI 入门套件由K26 系统级模块
2023-10-17 08:28:19
使用FPGA的灵活性,提供了多种的AI开发固件,可以让开发者测试使用FPGA支持的多媒体能力,并且开发板提供了基于FPGA的开发SDK,使得在该开发平台上快速开发AI应用。 ReID行人重识别(Person
2023-10-09 01:32:12
目前在使用ros2的humble版本,但使用中感受到的编译速度慢,node启动速度慢等体会是比较影响ROS2的普及速度的,KV260因为内部存在FPGA模块,可以实现硬件加速(accelerated
2023-10-08 23:42:52
Choose Task:[请输入括号内的数字]
---众多工具,等君来用---
ROS相关:
[1]:一键安装(推荐):ROS(支持ROS/ROS
2023-10-04 23:35:18
SDK 是一种构建在开源且被广泛采用的 GStreamer 框架上的应用框架。这种SDK 设计上支持跨
所有赛灵思平台的无缝开发,包括赛灵思 FPGA、SoC、Alveo 卡,当然还有 Kria
2023-09-26 15:17:29
的 API,而不需要下载多个 SDK。对于某些设备不支持的 API 的情况,开发者可通过 canIUse() 函数判断。
随着时间的推移,鸿蒙系统会发布新的版本,每个版本都会有配套的 API 更新
2023-09-19 15:45:38
什么是ST MC SDK5.xST MC SDK5.x支持的MCU及硬件评价板ST MC SDK5.x固件介绍ST MC SDK5.2图形化人机界面 MotorControl WorkBenchST MC SDK5.x 电动机参数测试ST MC SDK5.x 参考资料列表
2023-09-18 11:08:49 1
1 的提取算法,后端是局部地图的维护、闭环矫正与全局地图的更新。在 TUM 数据集测试中,其最高精度可达 1cm。我司基于该框架研发算法,实现双目视觉与 IMU 数据的融合,精准计算位移距离并给出可靠的实时
2023-09-18 10:12:49440 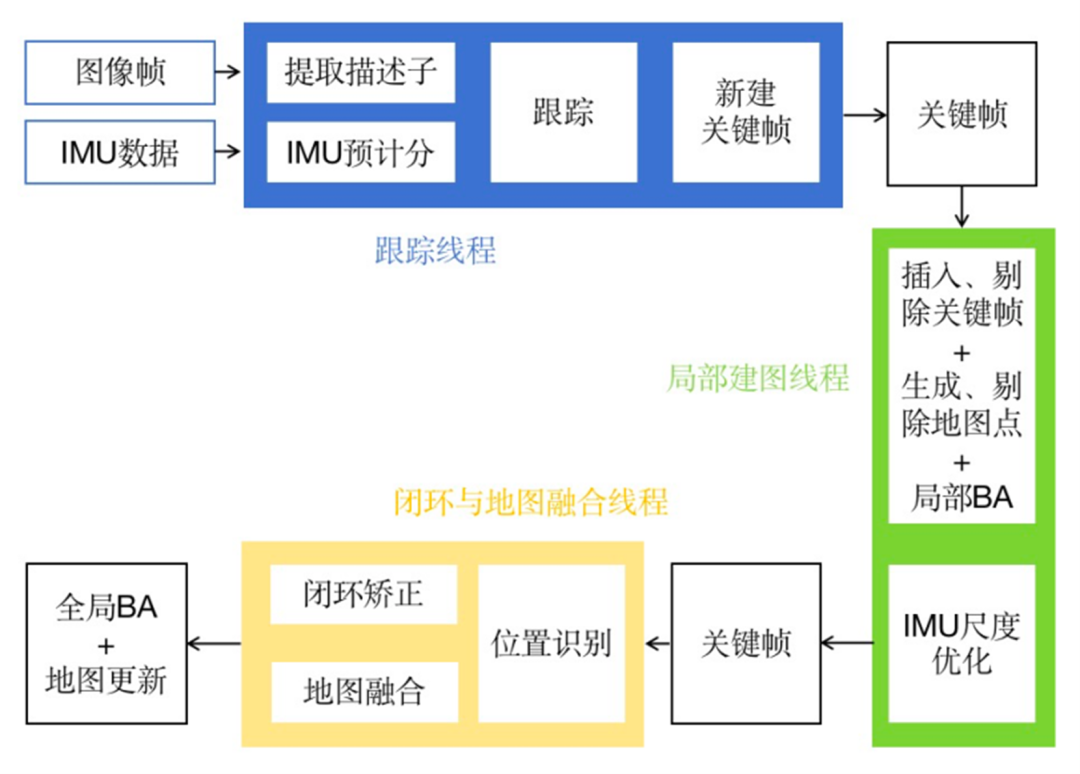
有rolling,目前也可以看到一些博文使用的是rolling版本的ros2
b.KRS想着的包比较多,很多包也还在不断更新中,甚至可能开发板推出时某些包的开发还未完成
c.KRS涉及ROS2 嵌入式
2023-09-17 00:13:54
理解了序列化,再回到ROS。我们发现,ROS没有采用第三方的序列化工具,而是选择自己实现,代码在roscpp_core项目下的roscpp_serialization中,见下图。这个功能涉及的代码
2023-09-14 17:26:28557 获取SDK
SDK 使用 Repo 工具管理,拉取 SDK 需要配置安装 Repo 工具。
Repo is a tool built on top of Git. Repo helps
2023-09-11 09:51:39
(libraries)和约定(conventions)的集合,旨在简化在各种机器人平台上创建复杂而健壮的机器人行为的任务。
ROS2 humble 是最新的 LTS 版本,官方发布在 Ubuntu 22.04 上,目前
2023-09-04 03:33:42
我将RTT studio升级到了2.2.7,SDK的版本是1.2.0,使能C++后编译会报出以下错误:
在RTT studio的2.2.6中则没有该问题,请帮忙解决下,谢谢。另外RTT studio的SDK中能否包含ROS或ROS2的功能?
2023-09-01 11:23:03
双目立体视觉一直是机器视觉研究领域的发展热点和难点,“热”是因为双目立体视觉有着及其广阔的应用前景,且随着光学、计算机科学等学科的不断发展
2023-08-25 17:28:331273 
双目更多的是基于物理测量,而单目视觉则是基于逻辑推理,通过大量的数据训练,先识别出目标,再根据目标的大小和高度估算距离。因此,单目视觉的漏检率高于双目立体视觉,因为客观上存在corner case。
2023-08-17 09:40:062165 
机器视觉也称为计算机视觉,包括单目视觉、双目(立体)视觉和多目视觉研究用计算机来模拟生物外部显示器或宏观视觉功能的科学和技术首要目标是用图像创建或恢复现实视觉模型,然后认知现实世界。机器视觉
2023-08-14 09:51:35615 
机器视觉也称为计算机视觉,包括单目视觉、双目(立体)视觉和多目视觉研究用计算机来模拟生物外部显示器或宏观视觉功能的科学和技术首要目标是用图像创建或恢复现实视觉模型,然后认知现实世界。
2023-08-11 09:34:00376 固件更新支持是PSA设备的基本属性。然而,在不同的嵌入式平台上更新设备固件的机制有很大的不同。这由于安全处理环境(SPE)的不同实现而进一步复杂化,安全处理环境(SPE)具有独立于应用固件的其自己
2023-08-09 06:22:52
获取SDK
SDK 使用 Repo 工具管理,拉取 SDK 需要配置安装 Repo 工具。
Repo is a tool built on top of Git. Repo helps
2023-08-02 09:24:54
、图像预处理和特征提取、立体匹配以及三维重建。为解决智能移动机器人、工业装配机器人、家用机器人、公共服务机器人的视觉问题,双目立体视觉技术的进一步研究可对多目视觉具有重要的启发。 本文对双目立体视觉测深
2023-07-19 14:18:240 本文对ToF、双目视觉、结构光这三种技术展开分析,帮助你了解其各自的特点及应用
2023-07-10 16:04:16903 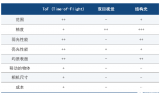
功耗低、性能好、联网快——基于移芯EC618平台的合宙低功耗4G-Cat.1系列模组,支持标准AT/LuatOS/C-SDK多样化开发方式,可满足用户不同开发需求。其中C-SDK仓库提供给客户自己
2023-07-08 10:04:221077 
功耗低、性能好、联网快——基于移芯EC618平台的 合宙低功耗4G-Cat.1系列模组 ,支持标准AT/ LuatOS/ C-SDK多样化开发方式,可满足用户不同开发需求。 其中 C-SDK仓库
2023-07-07 12:05:02545 
matching)复杂,对计算资源消耗很大。那我们介绍下几种经典的双目匹配的算法。 【双目匹配】 双目立体视觉理论建立在对人类视觉系统研究的基础上,通过双目立体图象的处理,获取场景的三维信息,其结果表现为深度图,再经过进一步处理就可得到三维空间中的景物,实现二维图象到
2023-07-04 11:33:511524 
首先,课程介绍了双目相机标定的基础知识。我了解到双目相机是由两个相机组成的系统,通过同时拍摄目标物体的两个视角来获取三维信息。
2023-07-03 14:25:061915 
双目立体视觉中常用的基于区域的局部匹配准则主要有图像序列中对应像素差的绝对值之和SAD(sum of absolute differences)、对应像素差的平方之和SSD(sum of squared differences)及半全局匹配算法SGM(semi—global matching)。
2023-07-01 09:34:021117 
一、概述先楫半导体的hpm_sdk,对于习惯用keil的开发者可能不太习惯,但是从开发角度上看,是比较灵活的,可以给开发者一定的发挥空间。该sdk支持cmake构建,可以在多个支持cmake的平台
2023-06-30 10:01:491777 
机器视觉检测平台 系统包含工业级智能机械手、机器视觉边缘处理终端、机器视觉感知单元、机器视觉显示单元、机器视觉场景应用资源包等部分组成,可模拟人工智能典型应用场景,实现人工智能应用技术教学落地。系统支持
2023-06-29 11:39:42440 6年磨剑造就INDEMIND硬实力
2023-06-28 10:33:29249 
SGBM(Semi-Global Block Matching)是一种用于计算双目视觉中视差(disparity)的半全局匹配算法,在OpenCV中的实现为semi-global block matching(SGBM)。
2023-06-28 09:29:271290 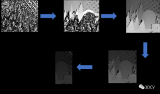
视差(Disparity):视差是指同一物体在两个图像中投影点之间的水平距离,它与物体到相机的距离成反比,因此可以用来估计物体的深度。视差图(Disparity Map)是指存储立体校正后单视图所有像素视差值的二维图像。
2023-06-19 10:14:14956 
“小眼睛半导体”出品的 Double_OV5640 双目摄像头模组使用;
注 2:注意摄像头方向,插反或错位可能会损坏摄像头或开发板;
注 3:输出视频格式为 720P@30,有部分屏幕是不支持。
步骤
2023-06-13 16:01:09
电子发烧友网站提供《英特尔计算机视觉SDK WindowsTASS PVL网络摄像头安全系统.zip》资料免费下载
2023-06-13 15:43:070 双目视觉传感器有效弥补了数据驱动的 AI 算法在泛化性能上的短板,深度学习模型与视差点云技术的结合,极大扩张了视觉传感器的工作边界。
2023-06-07 14:16:32217 
双目标定的方法有很多,常用的是基于棋盘格图案的张氏标定法,它利用多幅不同角度拍摄的棋盘格图像,通过提取角点坐标和求解最小二乘问题,得到两个相机的内参矩阵和外参矩阵,进而计算出基础矩阵。
2023-06-06 14:35:25658 
输入数据来源可以是单目视觉相机、双目视觉相机,数据可以是灰度图或者彩色图。
基于单目图片的称为单目车道线检测技术,基于双目图片的称为双目车道线检测技术。
2023-06-01 14:18:320 近些年迅猛发展的3D视觉技术已成为AGV领域的关键技术之一,进一步提升AGV智能化水平的同时,也实现了更高效、准确和安全的物流操作。在户外环境中,用于AGV托盘或货物识别最常见的两种3D视觉技术分别是主动双目视觉技术和ToF(Time-of-Flight)感知技术
2023-05-31 15:52:52886 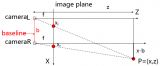
我需要 S32K312 SDK,但看到只有实时驱动程序支持。
我需要知道如何获得基本的 SDK。你有什么建议或重定向吗?
2023-05-30 14:06:18
Ros小车多功能QT上位机 代码仓库: 小车嵌入式控制可以查看我的博客: 小车通讯协议可以参
2023-05-29 15:00:341 SDK更新为V1.1.0无法编译,提示找不到board.c
把文件夹从hpm_sdk-main改为hpm_sdk后依然无法编译,请问这种情况如何解决
2023-05-26 06:19:04
我们已经通过 I2C 将 SE051C2 安全芯片连接到 MK81,我们从 nxp 站点获得了一些针对不同 MCU 的 SDK 示例。但是我们无法找到 MK81 支持的 SE05x 示例。
我们需要
2023-05-22 07:07:41
ROS是机器人操作系统(Robot Operating System)的英文缩写。ROS是用于编写机器人软件程序的一种具有高度灵活性的软件架构。ROS的原型源自斯坦福大学的STanford
2023-05-19 17:45:072797 
ROS的通信架构是ROS的灵魂所在,它包括数据处理,进程运行,消息传递等** 。这篇文章主要介绍ROS1的通信架构的基础通信方式和相关概念,因为ROS1和ROS2的通信方式相差很大,文章后面会介绍ROS2 的通信框架和差异。
2023-05-19 17:23:062693 
ROS的概念分为三个层次:文件系统层、计算图层、社区层,这些层次以及概念将会在接下来的章节介绍。
除了这三个层次的概念,ROS同样定义两个names类型,包资源名称和图形资源名称。
2023-05-19 17:11:591119 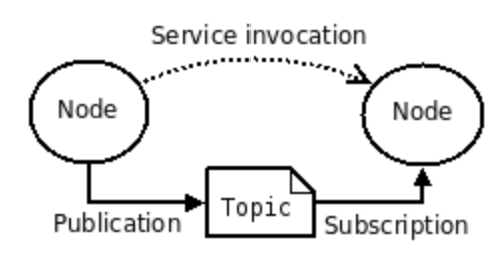
近来找到的实习主要是做智能车控制,用到的也就是ROS机器人操作系统,ROS需要运行在一个操作系统上,这个操作系统常用的就是Linux,而公司用的就是Ubuntu,所以Ubuntu-ROS组合就是实习的主要学习内容了。所以我就新开了一个坑,网络上ROS的资源很丰富,我在此只是用以分享学习笔记。
2023-05-19 17:07:413736 
的micro-ROS解决方案 。micro-ROS是一个使用ROS 2的机器人控制系统的开源项目,ROS 2是第二代ROS(机器人操作系统),用于微控制器上的各种机器人系统。 在本篇文章中,您将了解用于微型ROS实现工业机器手的最佳硬件和软件平台,这些平台可以使用
2023-05-18 23:15:02504 RK3568 :已具备产品化的完成OpenHarmony移植适配的模组。
主要能力:
基于Rockchip RK3568平台,集成双核架构GPU以及高效能NPU,四核64位Cortex-A55
2023-05-16 14:56:42
刚刚为 JN5188 创建并下载了 SDK。当我创建一个项目并尝试访问外围设备工具时,它显示为已禁用并显示“该工具不支持所选处理器”。处理器在配置硬件信息中显示为 JN5188,核心为
2023-05-12 08:19:42
T507:已具体产品化的完成OpenHarmony移植适配的模组。
主要能力:
全志工业级T507芯片,该芯片集成四核CortexTM – A53 CPU、G31 MP2 GPU、多路视频输出接口
2023-05-11 16:34:42
你好。我正在为 SJA1110 SDK 使用 S32DS 3.4。
我在“可用的 S32DS 软件站点”中添加 SDK .zip 文件,用于“首选项 -> S32 平台的 S32
2023-05-10 07:17:58
芯片烧录行业领导者-昂科技术近日发布最新的烧录软件更新及新增支持的芯片型号列表,其中昂科发布软件更新支持Espressif乐鑫科技的低功耗蓝牙模组ESP32-WROOM32E已经被昂科的通用烧录平台
2023-05-09 17:17:102151 
团队去年与 Open Robotics 一起,在提供硬件加速器的计算平台上加入了适应和类型协商以提高 ROS 的性能。他们还实现了用于 Isaac ROS 的适应和类型协商—— NITROS(NVIDIA Isaac Transport for ROS)。
2023-05-06 10:01:17323 
Blynk 最近推出了一个新的物联网平台,对 ESP8266 提供开箱即用的支持,具有许多很酷的功能,包括设备配置和管理、云中的数据托管、固件无线更新、用户和组织管理、数据分析、各种自动化等等。
2023-04-28 06:15:54
双目测距的原理就说到这里,为了避免大家看到大段纯叙述性的文字头晕,下面的行文将会以FAQ的形式围绕着实现双摄像头测距过程中碰到的几点疑惑展开。
2023-04-26 16:47:373393 
ESP8266 Software Development Kit(SDK)是乐鑫为开发者提供的物联网应用开发平台,包括基础平台以及上层应用开发示例,如智能灯、智能开关等。SDK 的基础平台按照是否基于操作系统可分为:non-OS 和 RTOS 两种版本。
2023-04-25 15:12:101156 
一、实验目的Double_OV5640 双目摄像头模组采集视频,通过 HDMI 输出到外部显示器。二、实验设计OV5640 寄存器配置FPGA 通过 I2C 接口配置 OV5640,在实验例程中已将
2023-04-18 16:45:09
变化(PTP-wise)。是否有更新的应用说明讨论 SDK 如何支持 PTP?我找到了 driver_examples\\enet\\txrx_ptp1588_transfer\\enet_txrx_ptp1588_transfer.c(以及其中的 readme.txt),但想知道是否还有其他我可以阅读的内容?
2023-04-18 08:46:34
使用 MCUXpresso“托管”项目与导入“演示”项目时项目设置/组织不同。这让我想知道演示是否是在不同的环境中创建的。但更重要的是,与通过 2.13.0 版本的 SDK 提供的文件相比,该演示似乎具有更新
2023-04-04 07:24:56
KIT EVAL SERDESUB-913ROS
2023-03-30 11:45:55
我无法安装任何 SDK。我收到“无法加载 SDK 更新站点或未设置 SDK 更新站点”。防火墙已被禁用。我已经安装了 v11.6.0。
2023-03-27 06:49:05
 电子发烧友App
电子发烧友App











 工商网监
工商网监
评论