Arduino IDE 机器人元器件 机器人套件
2024-03-14 23:22:09
Raspberry Pi pHAT 机器人元器件 机器人套件
2024-03-14 22:34:43
Arduino 机器人元器件 机器人套件
2024-03-14 22:34:43
云台 机器人套件
2024-03-14 22:33:42
轮式 机器人套件
2024-03-14 22:33:28
轮式 机器人套件
2024-03-14 22:29:39
机器人元器件 机器人套件
2024-03-14 22:03:38
Makeblock Me 机器人元器件 机器人套件
2024-03-14 21:40:36
抓爪 机器人套件
2024-03-14 21:40:28
轮式 机器人套件
2024-03-14 21:30:12
抓爪 机器人套件
2024-03-14 21:13:28
坦克胎面 机器人套件
2024-03-14 21:13:28
抓爪 机器人套件
2024-03-14 21:13:24
机器人元器件 机器人套件
2024-03-14 21:13:23
机器人元器件 机器人套件
2024-03-14 20:37:55
轮式 机器人套件
2024-03-14 20:37:52
机器人元器件 机器人套件
2024-03-14 20:37:45
两足 机器人套件
2024-03-14 20:35:14
实验名称:柔性驱动器的性能测试
研究方向:机器人的发展史已经超过了100年,机器人也逐渐从复杂笨重,功能单一的传统机器人进化为更为智能、微型且高集成的多功能机器人。而随着科技社会的进步
2024-02-27 17:15:22
基于微纳机器人的靶向递送技术在疾病诊断治疗、精准药物递送、无创手术等生物医学领域具有广阔的应用前景。
2024-01-13 11:29:57 790
790 
编程方法 了解了话题的基本原理,接下来我们就要开始编写代码啦。 创建工作空间 请大家先按照这个流程创建工作空间、下载课程的例程代码,并进行编译。 $ mkdir –p dev_ws/src $ cd /userdata/dev_ws/src $ git clone https://gitee.com/guyuehome/togetherros_tutorials.git $ cd /userdata/dev_ws/ $ colcon build 运行示例程序 编译成功后,我们尝试运行话题通信的Hello World例程,在这个例程中,我们会先创建一个发布者,发布话题“chatter”,周期发送“Hello World”这个字符串,消息类型是
2023-11-27 17:48:09175 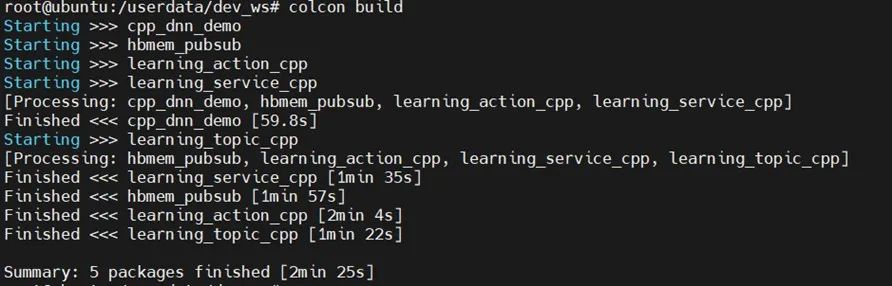
节点实现了机器人各种各样的功能,但这些功能并不是独立的,之间会有千丝万缕的联系,其中最重要的一种联系方式就是话题,它是节点间传递数据的桥梁。 通信模型 以两个机器人节点为例。A节点的功能是驱动相机
2023-11-27 17:25:50205 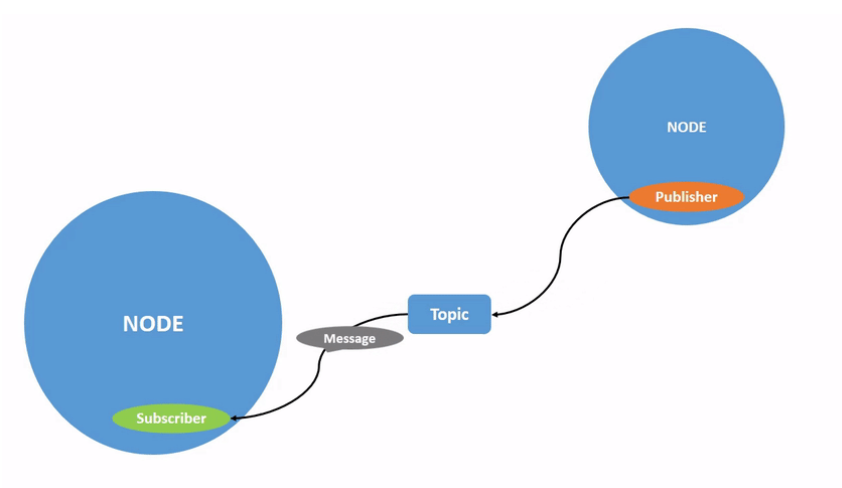
编程方法 相比之前话题和服务的程序,动作通信的例程相对较长,我们一起来运行并分析一下。 运行示例程序 $ source /opt/tros/local_setup.bash $ source install/local_setup.bash $ ros2 run learning_action_cpp server $ ros2 run learning_action_cpp client 代码解析 动作的服务器fibonacci_action_server.cpp: # include # include # include "learning_action_cpp/action/fibonacci.hpp" # include "rclcpp/rclcpp.hpp" // TODO(jacobperron): Remove this once it is included as part of 'rclcpp.hpp' # include "rclcpp_action/rclcpp_action.hpp" class MinimalActionS
2023-11-27 17:10:29159 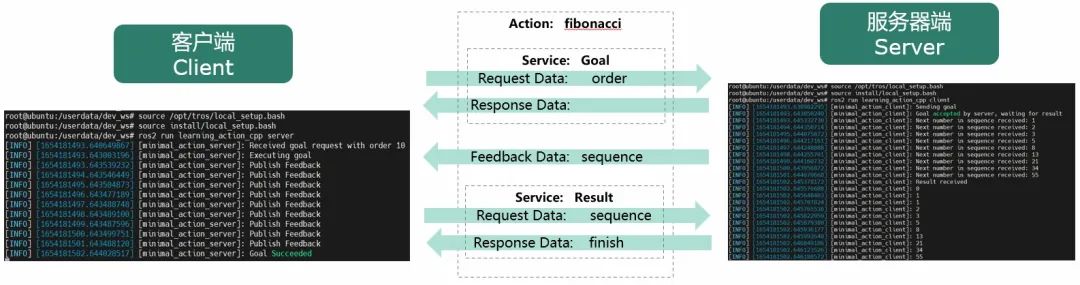
pic单片机做扫地机器人有什么优势
2023-11-09 07:24:46
机器人编程需要什么软件
2023-11-01 07:34:30
本文档的主要内容详细介绍的是Arduino教学机器人的使用教程
2023-09-27 06:53:26
的运营成本、人力成本还在不断提高(如:办公场地的租金、员工的工资、社保公积金、节假日福利等)。
如今的智能电话机器人,每天的电话拨打量可达800-1000通,相比人工提高了3-5倍,大大缩短了名单的筛选
2023-09-21 11:09:59
迈步手部康复外骨骼机器人,机器人可以带动手指完成两种康复运动——双向弯曲运动和内收外展运动。机器人可适应不同患者的手指尺寸,外骨骼手的长度可调节,长时间佩戴不会使患者产生疲劳感。手部康复外骨骼机器人
2023-09-20 17:38:02
下肢外骨骼康复机器人BEAR-A1利用仿生学、人体工学、机器人技术,为下肢运动功能障碍者提供康复训练。通过对患者髋、膝关节提供助力完成康复训练,可以有效降低治疗师工作强度,提高康复训练效率,提高患者
2023-09-20 17:31:33
迈步机器人BEAR-H系列是用于辅助脑卒中患者步态康复训练的新型可穿戴式下肢外骨骼机器人。机器人拥有主动被动训练模式,通过对患者髋、膝、踝关节提供助力完成行走训练,可以节省人力,并提高康复效果
2023-09-20 17:25:48
本案例是西门子1200PLC通过PROFINET转EtherNet网关连接发那科搬运机器人配置案例。所需设备:西门子1200PLC、Profinet转EtherNet IP网关、Fanuc机器人
2023-08-03 17:58:40
小型机器人为什么可以自由地展现多种姿态与动作呢?
2023-06-19 08:13:55
据透露,该园区除了库卡自身使用需求之外,还积极引入产业链上游供应商并完善产业链布局,打造机器人产业集群,助力机器人产业发展。目前,已进驻的产业链上下游企业共9家,覆盖机器人多个核心零部件,预计园区的供应链配套将达到85%以上。
2023-06-01 14:49:50773 我正在开发一些 WSN 机器人,
我现在正在使用 2 个 ESP8266,一个充当 WSN 传感器节点,另一个充当机器人节点,
机器人在从其他 WSN 传感器节点获取数据时正在工作(现在亮起LED
2023-05-22 09:55:59
目前手术机器人多用于骨科手术、神经外科、血管介入治疗机器人等手术中的辅助定位、造影建模或者是开刀等场景,通常由床旁机械臂系统、控制台和可视化系统等组成。
2023-05-17 10:40:59151 儿童陪护机器人越来越受到人们的关注,其中转动控制是其重要组成部分之一。步进电机芯片作为一种常用的控制芯片,被广泛应用于儿童陪护机器人中的转动控制。本文将从步进电机芯片的工作原理、优势和应用场景等方面
2023-05-11 15:12:45
推翻洗地机基站老款单点水位检测方案,使用多点检测方案,可依据水箱水位百分比检测水位情况,提高用户体验。
2023-04-24 11:39:49426 
机器人关节电机是专业为机器人关节设计研发生产。电机既有中空大孔径,能保证关节模组完美融合的组合, 电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列电机转矩脉动极低,易于速度控制和精确
2023-04-20 10:07:10
泰科关节机器人具备哪些优势? 一、编程简单可以让无编程经验的操作人员能快速设置和操作我们的直观、3D 可视化协作式机器人。只需将机器人手臂移动至需要的位置,或触摸方便易用的触屏
2023-04-19 15:13:28
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 15:03:00
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-19 14:54:26
深圳泰科智能TB6-R15协作机器人自重仅为37KG,却拥有处理高达15KG的有效负载,工作半径可达1333mm,卓越的伸展能力和有效负载,能够处理更大型、高精准度领域的自动化作业任务。这款协作
2023-04-19 11:43:30
深圳泰科智能TA6系列协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足
2023-04-19 11:14:26
TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-19 10:58:47
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:53:03
RJU系列关节模组一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户可根据自身产品方向,自由定位
2023-04-19 10:48:11
,让机器人开发更自由高精度绝对值编码器,精准控制运动轨迹,多圈绝对值编码器分辨率标配16单圈和16多圈,保障机器人定位更精准、运行轨迹的稳定性更好减少机器人开发过程
2023-04-19 10:40:37
机器人关节电机是专业为机器人关节设计研发生产。电机既有中空大孔径,能保证关节模组完美融合的组合, 电机的定转子机构紧凑,转子采用了高性能稀土永磁材料,此系列电机转矩脉动极低,易于速度控制和精确
2023-04-18 17:35:19
产品优势专注机器人关节研发,RJS系列关节模组具有定位精度高、性能可靠等特点。 模块化设计RJS关节模组集成无框电机、驱动器、谐波减速器、编码器、制动器于一体,结构小巧紧凑,6轴RJS关节
2023-04-18 14:04:34
TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-17 17:49:50
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C、医疗、电力、科研、教育等多个行业、多场景的自动化需求。
2023-04-17 16:36:37
RJU系列关节模组——面向商业、生活服务类应用 一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的机器人关节,而是一款能够给机器人更多设计空间,和应用领域的关节,客户
2023-04-17 16:25:29
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C
2023-04-17 15:49:48
深圳泰科智能TB6-R10协作机器人是一款功能更强的工业级协作机器人,能够胜任10KG的有效负载的自动化任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动化、汽车、3C
2023-04-17 15:40:56
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:31:15
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:25:07
深圳泰科智能TB6-R5协作机器人是一款灵活的轻型工业协作机器人,具有精巧的机械结构设计。这款协作机器人有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产
2023-04-17 15:15:06
RJS-II系列关节模组是泰科智能推出的一款基于模块化理念设计、轻巧、高精度的协作机器人关节,一体化集成的RJS-II不仅结构尺寸更小,性价比更高,为您解决机器人在更多复杂环境中的适应性和稳定性
2023-04-17 15:02:00
扫地机器人在进行清洁工作的过程中,需要涉及到地面的清洗和水的使用。为了避免机器因为水量过多或不足而造成电路故障或无法正常运作的情况,需要通过液位检测来控制水量。在清水箱中,一个水位传感器被置于填充
2023-04-15 11:21:46
焊接机器人多少钱一台?根据机器人本体的型号、臂长和焊机型号的不同价格也不尽相同,市面上的焊接机器人价格范围在3-20万不等。
2023-04-13 09:31:023346 
控制,通过GPS和5G实时定位巡检机器人的位置来实现日常例行任务和特训两种方式的巡检;(3) 自动充电,低电自动返航能够自主判断电池电量状态,电量不足自动返航,并与充电设备配合完成自主充电;(4) 自主避障
2023-04-12 15:49:23
3月29日,ITES深圳工业展在深圳国际会展中心隆重举行,中科新松作为引领协作机器人发展的行业先锋,携DUCO多可协作机器人及相关应用亮相展会现场,与汽车、电子、自动化装备等行业客户共同探讨在面对
2023-03-29 19:26:00344 弧焊机器人多少钱一台?无锡金红鹰总结一般弧焊机器人的价格在3万-20万左右,但工装的价格是另外的。另外机器人型号、品牌等也会造成价格差别,因此具体价格有所不同。
2023-03-23 09:59:452086 
 电子发烧友App
电子发烧友App










































 工商网监
工商网监
评论