 电子发烧友App
电子发烧友App


随着汽车智能化、电动化、电商化、共享化“新四化”变革的不断推进,新能源汽车和自动驾驶已然成为汽车行业的两个新兴领域,其中自动驾驶行业将成为未来汽车的主要发展方向。近日,在特斯拉举办的“Autonomy Day”上,正式发布了全自动驾驶计算机,并宣布或将于2020年就能在街头打到特斯拉无人出租车。
在这场产品发布会上,马斯克的一番言论惹怒了很多自动驾驶业者。“傻子才用激光雷达,现在谁要还是靠激光雷达,那就要完蛋,注定完蛋!激光雷达用了一大堆昂贵的传感器,毫无必要。就好比说,一个麻烦就已经够糟的了,而现在又多了一大堆的麻烦,这太荒唐了,不信等着瞧!”自信认为自动驾驶摄像头之路是正道的马斯克这样说道。
如今随着智能驾驶发展的势如破竹,环境感知技术得到了高速的发展,虽然传感器仅仅是自动驾驶的一部分,但市场前景却十分广阔,因而很多机构都预计在2020年左右此类传感器将进入高速成长期。但此次马斯克对激光雷达的贬低却引发了业内的讨论和反对,大多数汽车制造商都认为,在自动驾驶技术中,摄像头和激光雷达两大传感器缺一不可。
首先车载摄像头是实现众多预警、识别类ADAS功能的基础。在众多的ADAS功能中,视觉影像处理系统较为基础,对于驾驶者也更为直观,而摄像头又是视觉影像处理系统的基础,因此车载摄像头对于智能驾驶是必不可少。如今应用于汽车上的摄像头系统采用的是cmos图像传感器,能达到100-200万像素的高清传感器,主要包含单双目摄像头两种类型。
简单来说,单目摄像头的测距原理是通过图像匹配进行目标识别,如车型、行人、物体等,识别出其具体的轮廓,并根据传感器的尺寸,通过目标在图像中的像素大小估算出目标距离,准确识别是准确估算距离的第一步,要做到这一步,则需要不断更新、维护一个庞大的样本特征数据库,以保证这个数据库包含待识别的目标全部特征数据;而双目摄像头则是利用两幅图像的视差直接对前方测试距离,无需判断物体的类型,双目摄像头的精准度可达毫米级,而且测距所需时间远低于单目。
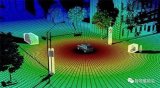
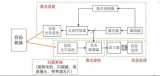
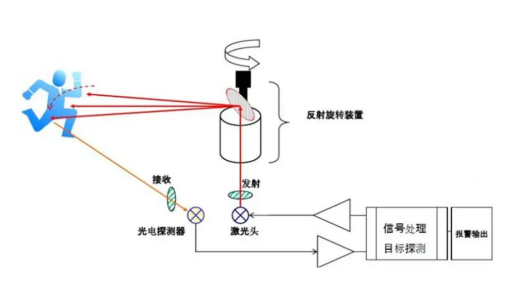
激光雷达是军转民的高精度雷达技术,一开始的应用主要为军事领域,受到了各国军事部门的极大关注。相较于普通雷达,激光雷达可提供高分辨率的辐射强度几何图像、距离图像和速度图像;在民用领域中,激光雷达因其在测距测速、三维建模等领域的优越性被广泛应用。激光雷达在自动驾驶领域为实现全面视野起到了非常重要的作用,能够进行精确定位距离并建立起当地环境的点云数据。
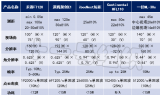
饮冰科技作为一家激光传感器与其系统解决方案供应商,针对目前激光雷达价格高、产能低、难过“车规”等问题,自2016年6月成立以来,一直研发“车规级”、高通道数、低成本的激光雷达,用于自动驾驶和智能交通领域。只用短短两年时间,相继推出16线、32线和64线激光雷达产品,其中以64线激光雷达为例,其探测距离120m,垂直视场31.5°,工作温度为-40~85℃,在探测距离和分辨率方面与同类产品相同的情况下,体积与价格也都有所降低。
值得注意的是,饮冰科技一直致力于激光雷达底层技术的研发,整机均由基础光电器件和材料组成,没有使用部件或半成品解决方案。饮冰科技的几个激光雷达产品都是基于航天、军工技术经验的产品机构设计,目前饮冰科技的产品主要包括单点激光雷达、电线激光雷达和多线激光雷达,以及正在研发芯片级的固态激光雷达。
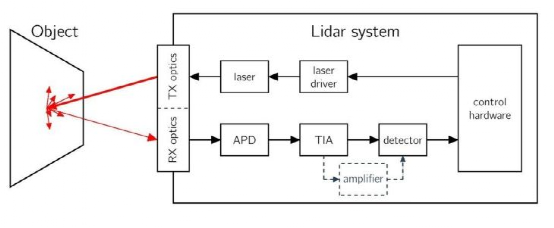
对于自动驾驶的环境感知系统来说,激光雷达是一种性能优异的传感器件,目前激光雷达的产业化落地进展虽然不尽人意,主要原因是这种精密的光电产品在光学调校方面遇到了巨大的困难。而激光雷达的每一通道都是由激光器和探测器,以及相应的外围电路组成,组成复杂,体积较大,这也是导致激光雷达产能低、价格高的根本原因,因此饮冰科技创造性的改变了激光雷达的生产流程,不仅使激光雷达具备了量产的能力,进而降低了成本。
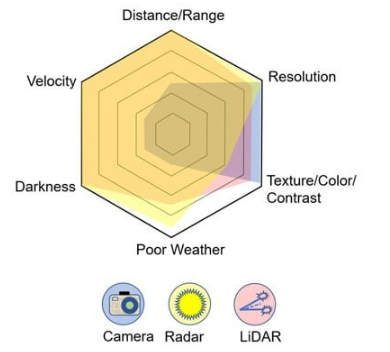
自动驾驶的安全性需要传感器冗余支持,并且需要多种传感器共同完成,因为没有一种类型的传感器可以在所有条件下发挥最佳性能。而马斯克对激光雷达的贬低实属不正确的,现如今激光雷达也确实有很大的提升空间,我们也有理由相信饮冰科技会让激光雷达技术有进一步的提升。


















































 工商网监
工商网监
评论