智能防盗系统ZigBee协议无线通信电路主要基于2.4 GHz双向无线传输模块JF24C.该模块以较小的体积实现了告诉数据传输功能.
2012-04-13 10:23:37 2368
2368 
无线通信FPGA设计缩略语表3GPP(3rd Generation partnership project):第三代移动通信伙伴计划ACH(Access channel):接入信道ADC
2009-11-26 10:58:07
SimpliciTI是TI开发的一份专门针对其CCxxxx系列无线通信芯片的网络协议。按照其官方说法SimpliciTI是一个基于连接的点对点通讯协议。它支持两种网络拓扑结构:直接的点对点通信结构
2012-10-23 23:39:10
本人正在学习无线通信,哪位高手能传点无线通信,matlab方面的书籍么?谢谢了。。。
2012-05-21 14:22:25
无线通信之工业领域工业无线性能稳定的产品,从哪里能够找到?使用国外的还是国内的产品,价格怎么样?能找到性能稳定又经济实惠的产品吗?大为智通的无线IO产品是你很好的选择。 虽然无线通信及其相关技术已经
2014-04-09 09:41:20
连接器引起的,而无线系统则可以有效的避免,并且在复杂的环境中保持稳定和可靠5、是安全性,DDA无线通信采用动态加密加密方式,保证数据传输私密性。6、第六是施工周期短,无线组网方式,可以通过节点的自组织
2020-05-27 21:05:32
1、概念1)无线通信无线通信是利用电波信号可以在自由空间那种传播的特性进行信息交换的一种通信方式。在移动中实现的无线通信又通称为移动通信,人们把二者合称为无线移动通信。简单讲,无线通信是仅利用
2021-08-06 10:06:16
求无线通信的入门书籍!!!!有没有
2015-03-15 16:59:47
广泛。近年来,针对通信设备的安全攻击也愈加频繁。提升波形加载的安全性、防止非授权修改等,成为无线通信产品设计与开发时的一个重要研究方向。波形技术是对数字信息进行调制 / 解调的技术集合。波形文件是波形
2018-02-22 09:58:09
模块的载波频率一致2.ZigBee有27个载波可以进行通信,载波叫做信道(无线通信的通道)。这些载波的频率落在某些频率区段,我们把这些区段叫做频段。有:2.4G频段 16个信道 (11-26)915M频段、 896M频段 11个信道但是TI的所有支持ZigBee底层协议的芯片只...
2021-07-26 06:31:22
ZigBee无线通信的频段是什么意思?ZigBee无线通信的网络地址是什么意思?
2021-09-24 13:21:07
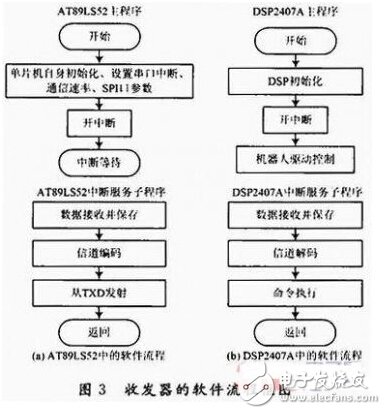
,任何通信系统之所以能正常工作离不开通信协议的支持。本文以研制一种通信电台为例,提出了一种适合无线通信电台的通信协议,实验结果证明此协议具有很好的性能。 关键词:通信电台;通信协议;DSP;FPGA[url=www.7773.cc]
2013-02-19 15:27:54
《无线通信FPGA设计》分布式FIR的并行改写,结果与matlab仿真结果基本吻合
2017-02-26 09:09:47
协议、七号信令和通信的信令流程。《大话无线通信》来源于通信人家园非常热门的技术帖“无线通信原理通俗解读”。全书采用了独特的行文风格,大量采用“水煮”的方式来帮助读者快速而轻松地对无线通信技术有一个整体
2017-06-08 17:09:41
`电子工业出版社,本书介绍了无线通信的背景知识,FPGA开发技术原理,VHDL语言及软件平台开发使用。大篇幅介绍了数字处理的硬件开发基础,以及无线通信各个模块的原理与FPGA实现,WCDMA系统关键技术的FPGA实现等,本书旨在提高设计者的工程开发能力。`
2021-04-06 11:36:21
近距离无线通信因其组网方便快捷在测控领域的应用越来越来广泛,如安全防火系统、水文气象监控、无线抄表、信号采集等。为满足日益增长的市场应用许多无线通信芯片生产厂家各自开发出性能优异的无线通信芯片
2018-10-23 13:14:37
怎么用?怎么学?假如要利用FPGA做一个无线通信的系统,同时想要利用wifi协议,那么在设计的过程中,该如何应用wifi协议呢?之前没有做过无线通信这块,最近看了很多资料仍旧是不得头绪,希望大家指点下迷津。谢谢。。QQ:490615203,也希望同样学习这方面的朋友一起交流学习
2015-01-27 18:25:22
FPGA无线传输的这个想法是不是可靠呢?麻烦大家了,希望在FPGA和无线通信方面学习的各位给我指点下迷津,重点帮忙讲解一下该如何应用通信协议,以及如何利用FPGA去实现协议,再次感谢大家!!!!PS:联系方式:QQ490615203
2015-01-27 18:15:35
本帖最后由 一只耳朵怪 于 2018-6-20 16:19 编辑
无线通信FPGA设计》以Xilinx公司的FPGA开发平台为基础,综合FPGA和无线通信技术两个方向,通过大量的FPGA开发
2018-06-20 08:50:10
地点都能安全地进行配置。 ——选自Change The World栏目《NFC 技术:引领门禁系统走向更安全及移动模式》 更多关于无线通信的热点应用、高层解读以及优质技术文章,欢迎访问电子发烧友网
2014-09-09 14:36:44
利用FPGA的无线通信收发模块设计方案[hide][/hide]
2009-11-26 10:25:56
小弟是电气自动化专业,在做毕业设计,题目是衡阳湘江大桥安全状态无线监测系统设计要求是采用基于ZIGBEE无线通信协议。现在的问题是:1.不知道从何下手,我知道要用到很多传感器,比如:拉力、温度、应变
2012-04-06 15:48:41
的第三层协议、七号信令和通信的信令流程。《大话无线通信》可供无线通信技术的初学者和自学者阅读参考,也可作为无线通信从业人员的参考书。
2015-03-28 00:31:39
本文从基于FPGA平台的专用芯片设计技术入手,分析和设计了一种摩尔斯电码的无线通信发射模块设计方案,并对设计进行了仿真验证。
2021-05-06 07:39:47
本文基于Virtex-5FPGA设计面向未来移动通信标准的Gbps无线通信基站系统,具有完全的可重配置性,可以完成MIMO、OFDM及LDPC等复杂信号处理算法,实现1Gbps速率的无线通信。
2021-06-07 06:48:08
随着物联网技术的愈发成熟,适用于智能家居无线通信协议的种类也日益增多。目前,最常见的无线通信协议有WiFi、蓝牙、Zigbee、Z-wave、RF等,前三者在智能家居应用中更为广泛。WiFi协议
2022-02-15 06:54:35
智能无线通信系统在汽车安全中有哪些应用?智能PKE收发器的应用有哪些?
2021-05-13 06:52:56
。 《测量与控制用无线通信技术》以作者开发的无线控制系统为典型例子,重点介绍了IEEE 802.11b、802.15.1(蓝牙)、ZigBee三种用于测量与控制的无线通信协议体系结构、协议栈软件的设计开发
2009-11-18 17:56:11
定位功能:蓝牙网关可以用于室内定位,通过收集蓝牙信标的信号强度,计算出设备的具体位置,实现人员或资产定位等应用场景。
总之,蓝牙网关是一种非常有用的网络技术,可以实现设备之间的无线通信和安全连接,支持多种类型的设备和协议,可以灵活地应用于各种场景中。
2024-02-06 10:48:15
组态的混合通信方案。本方案中采用了专门用于无线PPI通信的智能数据终端DTD433M。一、PLC无线通信的原则(1)采用自由串口协议,需要用户熟悉串口通信,会编程。(2)采用PPI协议,不需要编程
2012-11-22 10:56:32
组态的混合通信方案。本方案中采用了专门用于无线PPI通信的智能数据终端DTD433M。一、PLC无线通信的原则(1)采用自由串口协议,需要用户熟悉串口通信,会编程。(2)采用PPI协议,不需要编程
2012-11-27 14:49:21
组态的混合通信方案。本方案中采用了专门用于无线PPI通信的智能数据终端DTD433M。一、PLC无线通信的原则(1)采用自由串口协议,需要用户熟悉串口通信,会编程。(2)采用PPI协议,不需要编程
2012-12-05 14:01:15
本文利用RFID技术,用FPGA芯片与NRF905搭建了无线通信系统,成功的实现了无线收发数据。
2021-05-06 09:38:35
本人初学fpga,想用fpga实现软件无线电,无线通信,求高手指导并推荐通信这方面的书籍。。。谢谢。。。
2012-05-21 14:14:33
详细介绍无线通信在各种通信系统中的应用,单片机MCU与无线收发模块的硬件接口设计,点对多点无线通信协议的编写,点对多点无线通信系统打包与解包的软件设计。为无线通信
2009-04-16 10:32:03 21
21 详细介绍无线通信在各种通信系统中的应用,单片机MCU与无线收发模块的硬件接口设计,点对多点无线通信协议的编写,点对多点无线通信系统打包与解包的软件设计。为无线通信
2009-05-15 13:33:4415 本文介绍了Modbus 的控制网络及协议特点,着重分析Modbus ACSII 模式的消息帧组成、校验码的计算及主要的功能。并对利用Modbus 协议实现远程无线通信的有关要点作了说明。
2009-06-11 09:42:5411 无线通信FPGA设计
2009-07-28 09:50:1897 摘要:详细介绍无线通信在各种通信系统中的应用,单片机MCU与无线收发模块的硬件接口设计,点对多点无线通信协议的编写,点对多点无线通信系统打包与解包的
2006-03-11 13:37:22966 
本文基于Virtex-5FPGA设计面向未来移动通信标准的Gbps无线通信基站系统,具有完全的可重配置性,可以完成MIMO、OFDM及LDPC等复杂信号处理算法,实现1Gbps速率的无线通信。
2008-12-17 15:22:26867 无线通信系统的组成 无线通信(或称无线电通信)的类型很多, 可以根据传输方法、 频率范围、 用途等分类。不同的无线通信
2009-06-30 00:46:0922384 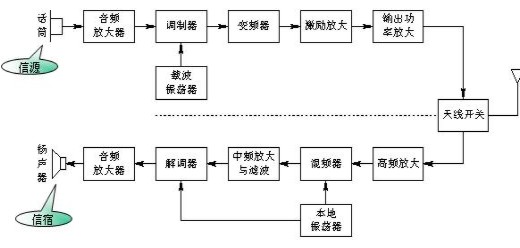
光无线通信技术,光无线通信技术是什么意思
光无线
2010-03-12 15:50:302098 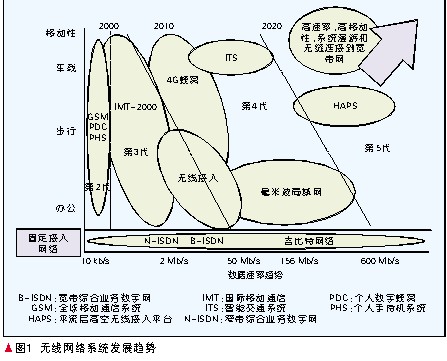
超宽带无线通信,超宽带无线通信是什么意思
摘要 随着无线通信技术的发展,人们对高速短距离无线通信的要求
2010-03-13 10:57:031362 无线通信部主要从事无线通信技术的研究、标准制定以及无线通信产品的检验工作。 无线通信部承担着信息产业部各类无线通信系统和设备的入网测试和国家通信产品的质量监督检验工
2011-03-24 12:36:2896 无线通信 FPGA方案设计:随着头部代码移动到新的位置,不会再和内核的目标地址冲突,可以开始内核自身的搬移了。此时r0寄存器存放的是内核长度(严格的说是长度外加128Byte的栈)
2011-06-21 17:51:5440 《无线通信FPGA设计》以Xilinx公司的FPGA开发平台为基础,综合FPGA和无线通信技术两个方向,通过大量的FPGA开发实例,较为详尽地描述了无线通信中常用模块的原理和实现流程,包括数字
2012-02-14 17:25:310 现场可编程门陈列(FPGA)芯片在许多领域均有广泛的应用,特别是在无线通信领域里,由于具有极强的实时性和并行处理能力
2012-06-01 16:19:125745 《无线通信技术》 徐少敏著本书共分为八个章节,分别介绍了无线通信的概念,系统组成,移动通信理论以及华为具体实例,无线通信技术未来展望等等。无线通信主要包括微波通信和卫星通信。
2016-05-18 16:20:380 基于FPGA和无线通信的密立根油滴测试系统设计_徐富新
2017-03-19 19:08:350 如何设计高效抗干扰的无线通信协议
2017-09-18 10:40:426 基于FPGA的无线通信系统设计与实现
2021-06-16 09:59:2944 智能门锁的无线通信协议有哪些?(急停开关锁具)据指纹锁的边肖介绍,我国智能门锁的无线通信协议主要包括蓝牙,但考虑到安全性、稳定性和电池寿命,ZigBee是目前主流的通信协议。 在购买家庭智能门锁
2022-02-03 20:29:531446 深圳市楷盟无线通信是一家专注于DMR语音对讲行业的专业对讲模块提供商,掌握从底层信号处理到上层协议全部核心技术,致力于为客户提供高性能产品。楷盟无线通信 专业对讲模块原厂 DMR数字对讲模块专家
2022-09-05 09:32:28
 电子发烧友App
电子发烧友App














 工商网监
工商网监
评论