对一般的开发者来说,CAN总线的位定时概念并不常见。不过,如果给整车厂做过零部件,经受过他们的CAN通信测试考验,您可能就知道,这也是比较重要的一个知识点。
2022-08-26 17:15:19 3239
3239 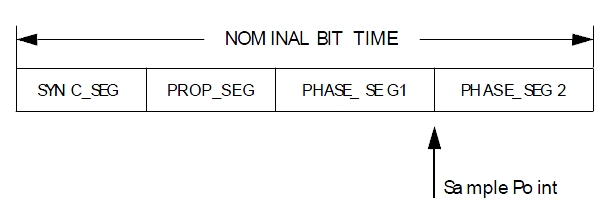
CAN 控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。
2023-09-22 16:52:00741 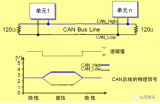
信号譬如视频、雷达等等也开始使用以太网来进行传输。隐隐有取代CAN总线成为汽车总线的趋势,然而事实真的是这样吗?
2018-02-26 09:32:3021367 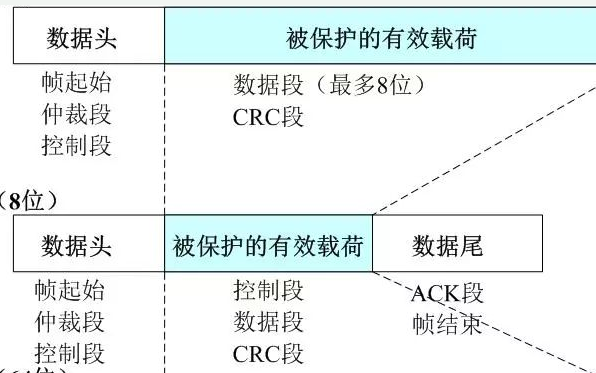
点间的传输过程,主要是连接介质、线路电气特性、数据的编码/解码、位定时和同步的实施标准。总线竞争的原则 BOSCH CAN基本上没有对物理层进行定义,但基于CAN的ISO标准对物理层进行了定义
2014-04-27 15:16:02
CAN总线通讯协议的每一帧可以看作一连串的电平信号,每一个电平信号代表一位(一个字节8位的位),所以一帧中包含了很多个位,由发送单元在非同步的情况下发送的每秒钟的位数称为位速率。一位又分为4段,同步段(SS)、传播时间段(PTS)、相位缓冲段 1(PBS1)、相位缓冲段 2(PB...
2021-08-20 07:43:39
通过足够的空闲时间(“相位缓冲段”)来补偿。 由于CAN协议使用非破坏性的位总线仲裁和显性应答位,信号从发送器传输到接收器再返回到接收器必须在一个位时间内完成。因此除了保留用于同步的时间外,还需要
2016-08-15 15:59:45
和重同步两种形式。它们遵从下列几条规则:在一个位时间内仅允许一种同步。 对于一个跳变沿,仅当它前面的第一个采样点数值与紧跟该跳变沿之后的总线值不相同时,才把该跳变沿用于同步。在总线空闲期间,若出现一个从
2018-12-18 14:51:33
CAN过滤器详解需要了解的知识:1.CAN:Controller Area Network,控制器局域网2.CAN-bus: Controller Area Network-bus,控制器局 域网
2021-08-20 07:03:16
的运行规则以及如何对位定时的参数进行设置。关键词:总线 位定时 同步 延迟1. 前言CAN总半导体器件应用技术论坛http://bbsic.big-bit.com线的数据传输速率最高可达1Mbit/s
2012-10-11 17:19:06
你了解CAN总线波形吗?你知道是什么因素造成CAN信号不稳定的吗?本文将带你探究影响CAN波形稳定的罪魁祸首——边沿台阶。阻抗匹配是指信号源或者传输线跟负载之间达到一种适合的搭配,阻抗匹配主要
2019-10-07 07:00:00
比特率(bit rate)CAN 总线的输出速度以单位时间内传输的位来衡量,称为比特率。CAN 总线在不同的系统中可以有不同的比特率。但是在给定的系统中,比特率是统一的和固定的。4.优先级
2018-12-14 14:37:44
上各节点间的传输过程,主要是连接介质、线路电气特性、数据的编码/解码、位定时和同步的实施标准。总线竞争的原则 BOSCH CAN基本上没有对物理层进行定义,但基于CAN的ISO标准对物理层进行了定义
2014-04-18 16:36:30
针对目前海事应用中液位遥测系统的现状,基于ARM9芯片的WinCE嵌入式开发平台,开发一套智能的液位遥测系统。该系统采用CAN总线,遵循CANopen协议,在EVC开发环境下结合多线程技术和数
2019-10-11 06:08:34
和SJA1000之间状态、控制和命令信号的交换都是在控制段中完成的。4.SJA1000检测到有复位请求,中止当前报文收、发工作,进入到复位模式,当复位请求位出现1到0的变化,CAN控制器将返回到操作模式
2022-01-11 06:50:05
主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误。当信号传输距离达到10Km时,CAN 仍可提供高达50Kbit/s的数据传输速率。 由于CAN总线具有
2017-10-19 11:12:46
为止。这一整个数据通信过程的延时为:。由此可见,CAN总线的通信距离和通信速率是和CAN总线数据通信的传输延时密切相关的。2. CAN总线的位定时与采样点:以1Mbps的传输速率为例,则速率的周期为
2021-05-13 06:00:00
使用应答信息。事实上,它可以将发生的任何错误用信号发出。CAN协议可使用五种检查错误的方法,其中前三种为基于报文内容检查。一种检查错误的方法分别为:循环冗余检查(CRC)、帧检查、应答错误、总线检测、位填充。
2015-11-05 17:17:31
什么是CAN BUS中的仲裁字段。它是否用于识别CAN总线上的每个节点? CAN总线有两个信号,CAN高(CANH)和CAN低(CANL)。 在图中,CAN使用11位标识符,总共为211,即2048
2020-10-02 23:00:00
产品的开发,CAN总线的稳定性是毋庸置疑的。CAN总线物理结构与特性CAN总线网络CAN总线网络主要挂在CAN_H和CAN_L,各个节点通过这两条线实现信号的串行差分传输,为了避免信号的反射...
2021-07-27 06:18:35
网络CAN总线网络主要挂在CAN_H和CAN_L,各个节点通过这两条线实现信号的串行差分传输,为了避免信号的反射和干扰,还需要在CAN_H和CAN_L之间接上120欧姆的终端电阻,但是为什么是120欧姆呢
2018-09-21 20:32:41
属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。在这个网络中的各种硬件设备之间不可避免的需要实现数据传输,以实现产品的功用。适应技术具体要求,CAN总线透明传输通讯模块诞生
2011-09-24 11:57:56
必须是相同的。• 传输层描述了 CAN 总线协议的内核,它负责位时序(bit timing)、同步、仲裁、应答、错误探测等。• 对象层负责报文的过滤、状态和控制。• 应用层完成用户指定的数据传输任务。CAN 总线的物理层为数据通信提供了物理连接,而实际的数据通信在其他 3 层中完成。
2018-12-14 14:17:02
什么是CAN总线信号传输的位定时?什么是CAN总线信号传输的位同步?
2021-05-18 06:52:14
位时序逻辑实现 CAN 总线协议中对位同步的有关控制。位时序逻辑监视串行 CAN 总线并处理与总线相关的位时序。它在报文开始发送、总线电平从隐性值跳变到显性值时同步于 CAN总线上的位数据流(硬同步
2018-12-20 11:40:50
9-7 所示。• 同步段:在这段时间内,完成总线上各个节点的同步,需要一个跳变沿。• 传播段:这个时间段是指网络上传输的延迟时间,它是信号在总线上传播时间、输入比较器延迟和输出驱动器延迟之和的两倍
2018-12-17 11:13:33
can概念与 I2C、SPI 等具有时钟信号的同步通讯方式不同,CAN 通讯并不是以时钟信号来进行同步的,它是一种异步通讯,只具有 CAN_High 和 CAN_Low 两条信号线。闭环总线
2021-08-20 06:14:27
),单位是MB/S;总线传输速率=(总线宽度÷8位)×总线频率BW=(w÷8) × f总线的其他性能指标:同步方式:同步,异步多路复用:地址总线和数据线能否公用一条物理线;信号线数量:数...
2022-03-01 06:43:11
太网等传统总线系统是在总线控制器的协调下,实现A节点到B节点大量数据的传输,CAN网络的消息是广播式的,亦即在同一时刻网络上所有节点侦测的数据是一致的,因此比较适合传输诸如控制、温度、转速等短消息
2019-07-26 08:33:27
Gardner算法实现基带信号位同步的原理和MATLAB程序讲解-无线通信技术分享-4作者:频率相应关键词:Gardner算法 异步位同步 插值滤波器 非数据定时误差提取 TED 环路滤波器各位朋友
2013-09-10 15:17:26
震荡器就可以实现同步(大幅度降低成本); 4、保证信号传输的延迟时间; 5、可以灵活地增加或减少从节点; 6、一般情况下LIN网络中节点数量不宜大于16 7、最大传输距离可以达到40米 8
2021-02-20 16:26:24
MCU是野火的STM32H743挑战者,例程基于野火的《CAN双机通信》;位时序分解STM32 的 CAN 外设位时序中只包含 3 段,分别是同步段 SYNC_SEG、位段 BS1 及位段 BS2
2021-08-11 09:10:55
电压分别3.5V和1.5V,即压差为2V,经过收发器转换,MCU则可通过CAN_Rx读取到信号0。
通信的整个过程
空闲状态
在CAN协议中,当总线上的上出现连续的11位隐性电平(两根线电压差小于0.5V
2023-12-05 10:45:42
电压分别3.5V和1.5V,即压差为2V,经过收发器转换,MCU则可通过CAN_Rx读取到信号0。
通信的整个过程
空闲状态
在CAN协议中,当总线上的上出现连续的11位隐性电平(两根线电压差小于0.5V
2023-12-04 14:47:44
;物理层: 决定了位编码方式(NRZ编码,6个位插入填充位),位时序(位时序、位的采样)、同步方式(根据同步段ss实现同步,并具有再同步功能);但具体的说:信号电平,通信速度,采样点,驱动器和总线
2015-01-22 16:12:04
总线上的数据采用不归零编码方式(NRZ),可具有两种互补的逻辑值之一:显性及隐性。CAN总线中各节点使用相同的位速率。它的每位时间由同步段、传播段、相位缓冲段1及相位缓冲段2组成。发送器在同步段前改变
2016-11-06 17:00:51
总线和处理与总线有关的位时序。它在信息开头的“帧起始”位传输时同步CAN 总线位流(硬同步),接收信息时再次同步下一次传送(软同步)。位时序逻辑模块提供了可编程的时间段,用于补偿不同总线控制器的时钟
2012-12-21 15:57:48
总线的通信过程中必须保证信号延迟不能超过CAN总线的允许值,而这主要是由CAN总线物理层的位定时和同步功能决定的。CAN总线的位时间被定义为一位的持续时间。一个位时间可划分为4个不重叠的时间段,即同步段
2018-12-04 10:41:09
编码,它保证了具有足够同步能力的最高传输性能。这种类型的编码还提供非常良好的信号辐射特性(总线辐射的能量大致上和传输信号的频率以及信号边沿的数量成比例)。 CAN协议中应用NRZ编码的部分包括SOF
2016-07-21 16:49:03
CAN里有一个位同步的概念,我以前用STM32时,还有专门用于做位同步的结构体请问我现在用FPGA作CAN,需不需要设计位同步?还是外接的独立CAN控制器自己本身就有位同步
2018-10-10 09:35:45
关于CAN总线位定时和同步机制的简要分析
2021-05-28 06:05:24
的传输系统。总线数据采用NRZ编码,全双工差分方式传输。CSDB信号的数据格式与 RS-232-C标准完全相同,都为异步串行通信格式,即:一个起始位、八个数据位、一个奇偶校验位、一个停止位,其电气标准
2012-09-28 16:07:16
如何同步S32K118的can总线?我使用 can_pal_s32k118 的示例,但 ESR1 寄存器 指示 Flexcan 未同步到 CAN 总线。
2023-05-24 10:12:10
的同步时钟。位同步的目的是使每个码元得到最佳的解调和判决。位同步可以分为外同步法和自同步法两大类。一般而言,自同步法应用较多。外同步法需要另外专门传输位同步信息。自同步法则是从信号码元中提取其包含的位同步
2019-08-05 06:43:01
占用总线传输时间,所以导致其他正常节点发送延迟或者无法发送,影响整车CAN总线正常运行环境。解决方案:主机厂必须要求节点A、B、C的工作电压必须要工作在1.8V,乃至2.0V,这个问题便得以解决。 错误
2019-04-26 10:52:24
采用具有24位∑-△型A/D转换器的系统级单片机MSC1210结合低成本的供电解决方案与CAN控制器SJA1000以及CAN总线收发器82C250,设计一种具有CAN总线接口的24位称重数据采集系统,可应用于组合称重设备、选别设备。
2021-04-14 06:15:25
域。更高级别优先级标识的报文总是能获得总线访问权,即:标识符中最后保持逻辑高电平的会继续传输,因为它具有更高优先级。 ISO-11898:2003标准,带有11位标识符,提供的最高信号速率从
2021-03-23 08:30:00
对另一个进行写操作。位流处理器是一个控制发送缓存器和接收缓存器(并行数据)与CAN总线(串行数据)之间数据流的序列发生器。位定时逻辑将SJA1000同步于CAN总线上的位流。验收滤波器支持11位和29
2015-08-17 14:21:59
_TX和CAN_RX)的TTL信号转换成CAN总线的电平信号。PS:你可以把CAN总线通信认为是UART通过485进行通信:CAN控制器就如UART的控制器,而CAN收发器就如485转换芯片。2、ISO标准化
2018-10-10 09:53:40
发送缓存器和接收缓存器(并行数据)与CAN总线(串行数据)之间数据流的序列发生器。位定时逻辑将SJA1000同步于CAN总线上的位流。验收滤波器支持11位和29位标识符的滤波,所有收到的报文由验收
2020-07-08 15:34:41
CAN总线的位时序与参数设置@ [TOC]CAN的位时序构成CAN总线的每个位(Bit)的周期 Tbit = 1 / Baudrate。根据CAN规范,每个位的时间内又可细分成4段:同步段
2021-08-20 06:38:55
级别优先级标识的报文总是能获得总线访问权,即:标识符中最后保持逻辑高电平的会继续传输,因为它具有更高优先级。ISO-11898:2003标准,带有11位标识符,提供的最高信号速率从125Kbps到1Mbps
2021-03-08 10:04:15
[/td][td]CAN总线物理层1. 物理层1.1.1 位定时1.时间份额(Time Quantum),时间份额来源于对系统时钟可编程的分频。时间份额原理如图4.11.1。1.波特率l波特率由编程
2015-06-25 13:48:54
,请问位速率是不是跟比特率一个意思?在协议中提到时间份额Tq,时间份额Tq是怎么来的,是CAN总线时钟频率的倒数吗?请大神帮我解答,谢谢
2018-08-06 19:51:31
,节省了总线冲突仲裁时间;(4)采用短帧结构,传输时间短,受干扰率降低,具有极好的检错效果;(5)每帧信息都有crc校验及其它检错措施,数据出错率极低;(6)通信介质可灵活地选择;(7)can上的节点
2019-06-11 05:00:07
CAN 通信中, 波特率、位周期内取样点数和位置可以编程设置, 这些设置为用户根据其应用优化网络通信性能提供了方便。优化位定时参数,能够保证信息同步,保证传输延迟和时
2009-05-15 15:08:40 6
6 在VXI总线系统中,为了能够获得大量实时数据,需要利用CAN总线快速可靠的传输数据的性能,设计一种混合VXI总线和CAN总线的系统。在这种混合系统中要实现CAN总线上各个节点采集
2009-07-06 16:27:5813 将高速CAN传输与数据采集测量同步:对于需要为基于CAN总线的电子模块和系统创建设计验证、生产制造和性能测试系统的工程师而言,National Instruments(NI)公司的PXI平台是测试和测量
2009-10-01 19:04:2210 控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议由德国的Robert Bos
2012-09-10 09:22:53197509 
汽车CAN总线基础详解与基本应用情况与实例分享
2016-03-22 15:50:110 CAN总线通信详解。
2016-03-30 16:46:100 [第13讲] CAN总线(124分钟),由何强主讲.本课主要讲解:(1).典型CAN总线网络系统结构详解;(2).CAN总线的报文传输和结构讲解;(3).CAN总线特点讲解;(4).STM32中的CAN控制器;(5).CAN控制器的寄存器详解;(6).CAN控制器的库函数详解.
2016-10-09 16:14:191644 网络上的数据流量,传输效能高。CAN总线的上述性能都已固化在CAN总线处理芯片之中,使用极为方便[3]。LIN总线基于通用UART接口,几乎所有微控制器都具备LIN必需的硬件,网络采用极少的信号线(一根12V信号总线和一个无固定时间基准的节点同步时钟线),设备硬件成本低[2]。
2018-07-18 12:22:001455 
基于保证CAN总线网络传输数据时可靠性的目的,采用了从包内数据的可靠性、数据包的可靠性传输两方面进行验证的方法,通过多次对比使用文章设计的算法、不使用文章设计的算法时CAN总线网络传输数据的准确率
2017-12-21 16:19:060 CAN通讯中使用的是同步数据传输,CAN控制器在其通讯过程中会不停出现位同步的操作,但不同的数据通讯系统对位同步的要求是不同,为了满足其要求,我们必须更加深入的来探讨另一个概念叫位定时段的规格
2018-03-13 14:09:001352 
CAN总线是一种基于优先级的串行通信网络,采用载波监听多路转换冲突避免协议,CAN总线中传输的数据帧的起始部分为数据的标识符,标识符可以区分消息又可以表示消息的优先级(0 的优先级最高)。
2018-04-24 17:48:1619009 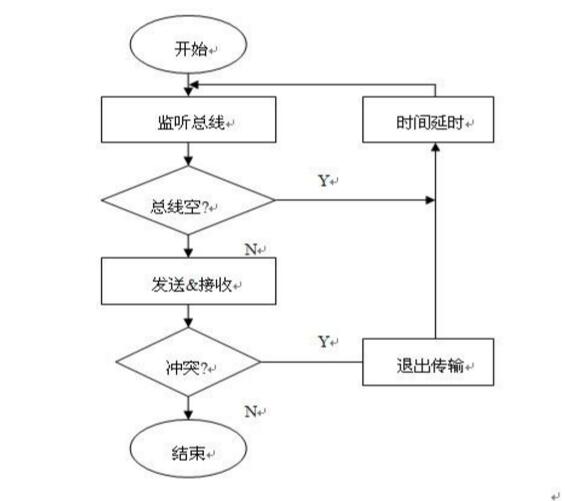
本文首先介绍了CAN总线的总体结构,其次介绍了汽车CAN总线数据传输系统构成及工作原理,最后介绍了汽车CAN总线故障产生的原因以及用万用表测量诊断CAN总线方法详解。
2018-04-25 08:54:18145063 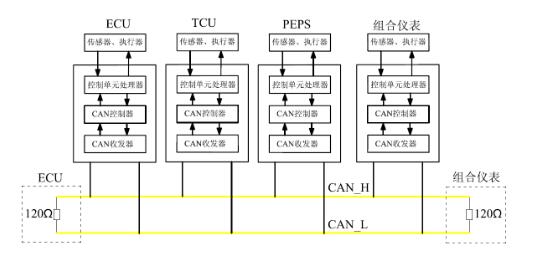
本文首先介绍了can总线的概念与特点,其次介绍了CAN总线原理与CAN总线的应用,最后分析了can总线是数字信号还是模拟信号以及阐述了模拟信号和数字信号之间的区别。
2018-04-25 09:15:5776257 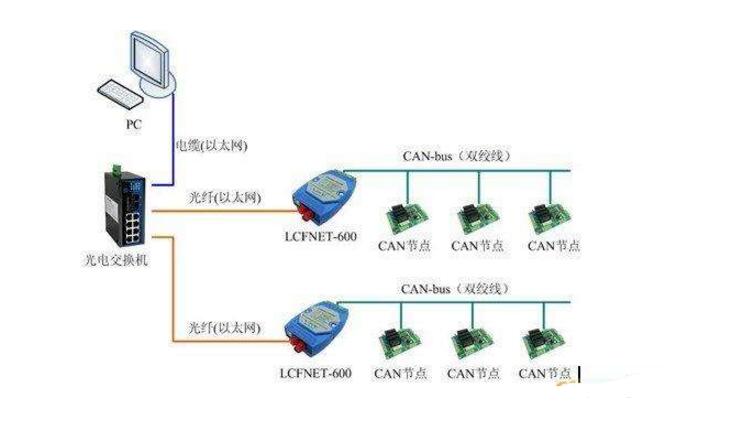
用来实现CAN总线协议。本文主要对CAN总线通信报文验收滤波、位定时与同步做了详细介绍,具体的跟随小编一起来了解一下。
2018-05-07 16:16:129726 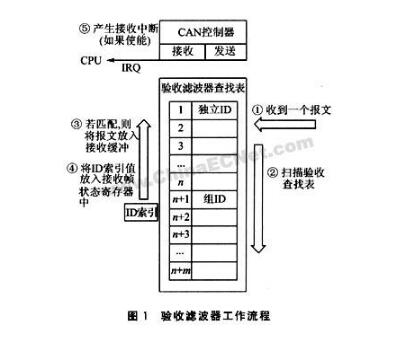
本文档的主要内容详细介绍的是CAN总线基础的详细资料概述包括了:概述,汽车总线与CAN标准,CAN的通信机制,数据帧,错误检测与错误帧,CAN的帧格式,位定时与同步
2019-11-29 15:31:20105 由于CAN协议使用非破坏性的位总线仲裁和显性应答位,信号从发送器传输到接收器再返回到接收器必须在一个位时间内完成。
2020-03-21 11:23:392224 了物理数据在总线上各节点间的传输过程,主要是连接介质、线路电气特性、数据的编码/解码、位定时和同步的实施标准。
2020-08-14 11:29:137853 CAN总线一直以来以稳定、容错性高而著称。要想达到这样的效果,其独特的同步机制是非常重要的一点,本文将为大家讲解一下CAN总线的同步机制以及SJW的作用所在。
2020-12-26 02:52:08958 检验CAN总线信号方法说明。
2021-04-19 17:32:4614 对信号源时钟提取的要求以及CAN总线的非破坏性总线仲裁的特点,设计了一种CAN总线信号编解码方法,井用FPGA加以实现;通过实际的通信实验验证了设计方案的正确性,并根据实验数据对CAN总线在两种介质下的传输性能作了比较。
2021-04-20 10:24:3733 ),是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,用来取代昂贵而笨重的配电线束。CAN协议的使用广泛这一特点使其很快延伸到自动化控制以及工业领域中。 CAN协议的特性包括完
2022-01-15 17:04:485782 在详解CAN总线:CAN总线报文格式—数据帧文章中,讲解到仲裁段。仲裁段用于写明需要发送到目的CAN节点的地址、确定发送的帧类型(当前发送的是数据帧还是遥控帧),并确定发送的帧格式是标准帧还是扩展帧。
2022-10-25 14:00:181634 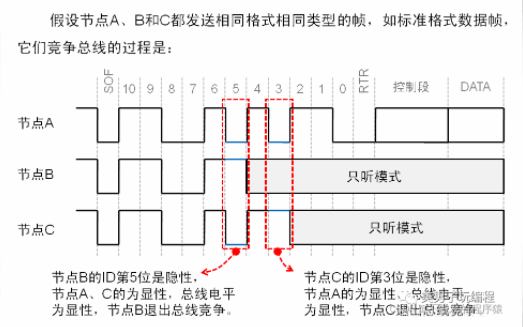
CAN总线网络主要挂在CAN_H和CAN_L,各个节点通过这两条线实现信号的串行差分传输,为了避免信号的反射和干扰,还需要在CAN_H和CAN_L之间接上120欧姆的终端电阻。
2023-01-30 09:24:323533 即从CAN控制芯片输出逻辑电平到CAN收发器,然后经过CAN收发器内部转换将逻辑电平转换为差分信号输出到CAN总线上,CAN总线上的节点都可以决定自己是否需要总线上的数据。
2023-03-29 10:06:167598 一个由CAN 总线构成的单一网络中,理论上可以挂接无数个节点。实际应用中,节点数目受网络硬件的电气特性所限制。CAN 可提供高达1Mbit/s的数据传输速率,这使实时控制变得非常容易。
2023-06-11 09:41:451664 
CAN总线采用分布式冲突检测与非破坏性位定时的技术原理,通过总线上的节点共享传输媒介(如双绞线)进行通信。EtherCAT则基于以太网技术,使用主从结构和主站广播的方式,在一个以太网帧内实现了多个从站设备的同步通信。
2023-06-28 16:28:576966 CAN总线协议目前广泛应用于汽车中各种不同控制器之间的通信,CAN总线的物理应用是采用绝缘的双绞线来进行信号的传输,是世界上应用最广泛的现场总线,CAN总线本身具有强大的抗干扰能力。
2023-08-11 11:10:29922 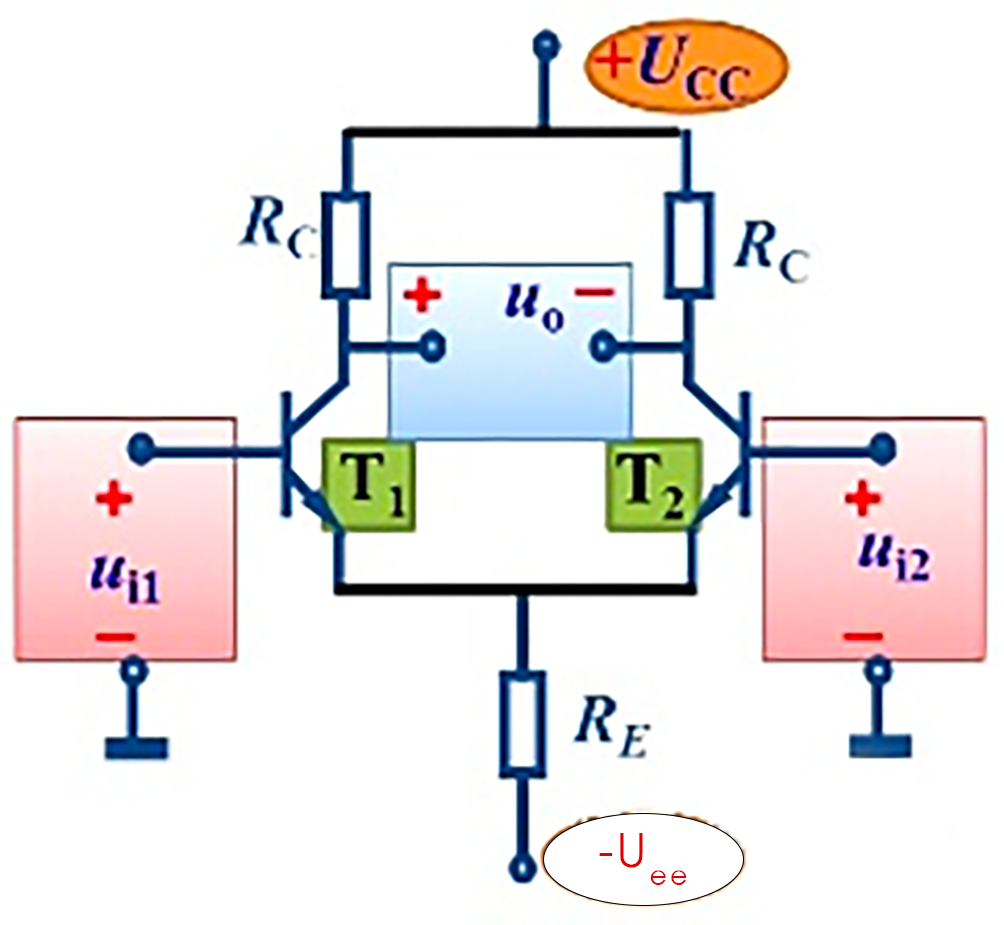
can总线负载率多少合理 CAN总线是一种控制器区域网络,它是用于在不同设备之间进行通信的技术。CAN总线的应用领域广泛,例如汽车、航空航天、医学仪器等。在CAN总线中,数据通过网络传输,并且在
2023-09-07 15:05:412173 can总线的传输速率是多少? CAN(Controller Area Network)总线是一种控制区域网络,是一种高速串行通信总线,广泛应用于汽车、工业、医疗和家庭等领域。CAN总线是一种实时
2023-09-07 15:05:439443 CAN总线是差分信号,两个设备之间使用双绞屏蔽线缆连接,两个线缆分别传输CAN_H和CAN_L信号。
2023-09-14 14:58:031247 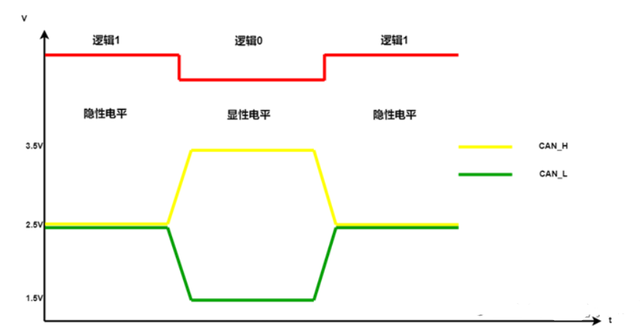
can总线干扰信号如何消除? CAN总线是一种广泛应用于自动化系统通信的高效数据传输方式,其基于差分信号传输原理,可以实现高速、实时数据传输。然而,由于各种原因,CAN总线的信号通常会受到干扰
2023-09-14 16:48:032378 怎么用示波器看can总线信号? CAN总线是一种高速、可靠的控制器局域网络,常被用于汽车、航空等领域。在调试和故障排查时,我们可以使用示波器来监测CAN总线的信号。以下是如何使用示波器来看CAN
2023-10-11 17:19:303260 到各slave节点(TS),还可通过时间网关(TW)将时间同步到其他子网,以解决因各ECU节点的硬件时钟信号偏差、CAN总线传输延时如协议仲裁以及各ECU节点内的软件处理等原因导致的时间延迟。网络拓扑
2023-10-27 14:39:19889 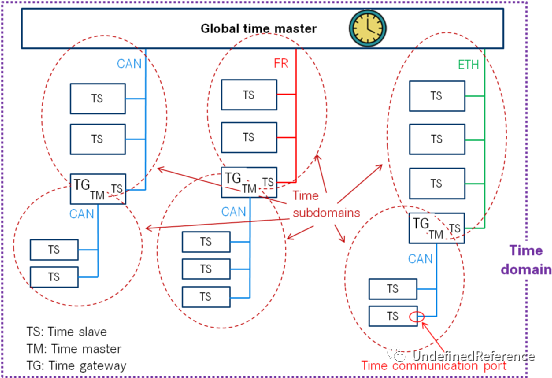
CAN总线是数字信号?还是模拟信号? CAN总线是一种数字通信协议,因此可以说是传输数字信号的。下面详细介绍CAN总线是如何以数字信号进行数据传输的。 CAN(Controller Area
2023-11-22 18:18:251294 can总线传输距离 CAN总线是一种串行通信协议,常用于汽车行业中的数据通信。它被广泛应用于车载电子系统,如发动机控制单元、制动系统、仪表盘和空调控制系统等。CAN总线的主要优势在于其高可靠性
2023-12-07 18:09:401217 CAN总线在传输通讯时需要使用屏蔽线,以提高信号的抗干扰能力和可靠性。
2024-01-30 10:06:45466 高速CAN总线和低速CAN总线的特性 高速CAN总线和低速CAN总线是两种常见的CAN总线类型。它们在数据传输速率、最大电缆长度、适用场景等方面存在一些差异。下面将详尽、详实、细致地介绍这两种CAN
2024-01-31 14:09:01497 总线的传输距离相对较短,通常在40米左右,最大也只能达到1000米。而485总线的传输距离相对较远,一般可以达到1200米,而且还可以通过增加中继器来扩展距离。这主要是由于485总线采用差分信号传输方式,能够很好地抵抗干扰。 二、通信速率 CAN总线和485总线在通信
2024-02-03 09:22:391587
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论