完善资料让更多小伙伴认识你,还能领取20积分哦,立即完善>
与复杂且昂贵的分立设计方案相比,ADIS16480为精确的多轴惯性检测与工业系统的集成提供了简单而高效的方法。所有必需的运动测试及校准都是工厂生产过程的一部分,大大缩短了系统集成时间。严格的正交对准可简化导航系统中的惯性坐标系对准。SPI和寄存器结构针对数据收集和配置控制提供简单的接口。
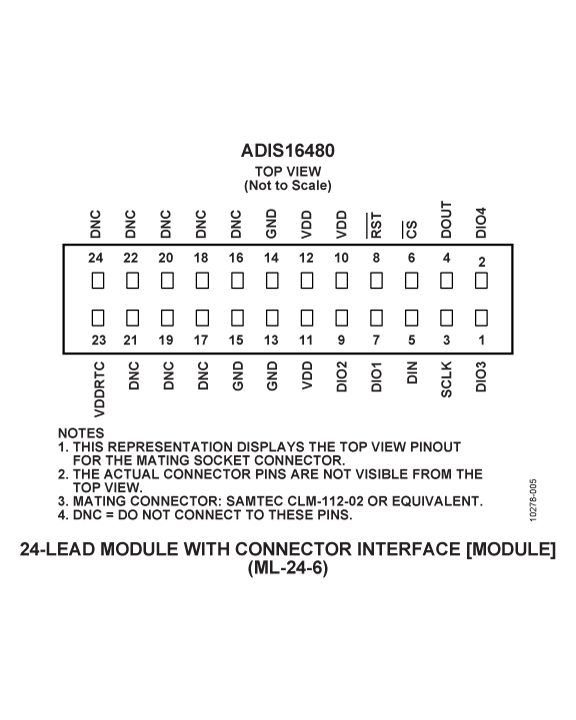
ADIS16480的尺寸和连接器系统与ADIS16488相同,可大大简化升级过程。它采用约为47 mm x 44 mm x 14 mm的模块封装,配有标准连接器接口。工作温度范围为−40°C至+85°C。
应用
- 平台稳定、控制和指向
- 导航
- 仪器仪表
- 机器人

关注我们的微信

下载发烧友APP

电子发烧友观察

版权所有 © 湖南华秋数字科技有限公司
长沙市望城经济技术开发区航空路6号手机智能终端产业园2号厂房3层(0731-88081133)
电子发烧友 (电路图) 湘公网安备43011202000918 工商网监
湘ICP备2023018690号-1
工商网监
湘ICP备2023018690号-1


