聚丰项目 > 智能红外跟随小车
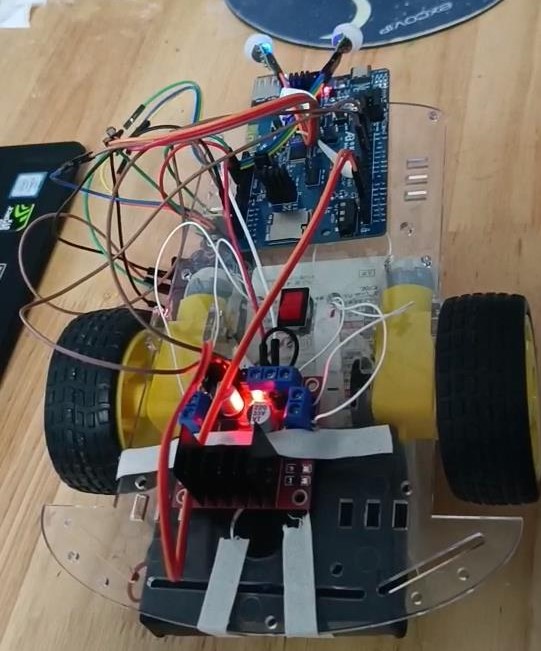
本项目基于AB32VG1开发板,开发能够自动跟随人运动的智能红外跟随小车。 主要功能如下:1、基于红外传感器探测前方人前进、左右移动趋势;2、基于 红外探测结果,控制小车自动前进、左右移动。
![]() 圣骑士aabb
圣骑士aabb
![]() 圣骑士aabb
圣骑士aabb
团队成员
圣骑士aabb 工程师
本项目基于AB32VG1开发板,使用HC-SR505迷你人体感应模块、L298N小车驱动 模块实现对人体移动趋势探测和控制小车移动功能。
1、人体感应探测:PE.6和PE.7实现接收人体感应模块的探测结果。
2、小车运动控制:PA.1、PA.2、PA.5、PF.1实现控制小车前进、左右移动。
3、红外接收命令控制:使用AB32VG1自带的红外配置,在RT-Thread Settings下使能硬件下的Enable IRRX即可。

本项目软件基于RT-Thread Studio软件实现,项目中主要由两个任务:人体感应探 测任务和小车运动控制任务构成。

1、人体感应探测任务:获得两个红外探测传感器输入值。
rt_thread_create("detect", DetectThreeDirection, RT_NULL, 1024, 15, 20);
2、小车运动控制任务:根据红外输入和距离输入,确定是向前方移动或左右移动。
rt_thread_create("car", ControlCarMove, RT_NULL, 1024, 15, 20);
3、距离探测任务:获得距离传感器输入值。
rt_thread_create("distance", DistanceTest, RT_NULL, 1024, 15, 20);
该项目演示效果如下,当红外探测到正前方时前进。当左右探测时,则随之左右移动。
(11.06 MB)下载
 工商网监
工商网监