聚丰项目 > 基于AB32的倒立摆欠驱动控制系统设计
该项目基于AB32微处理器,运行RT-Thread操作系统,实现了旋转倒立摆的自平衡控制。倒立摆模型是自动控制领域非常经典的控制模型,其自身能提供的力和其自由度不相等因为被称作为欠驱动控制系统。其力学平衡原理与火箭控制,飞行器控制等一致,因此倒立摆模型是非常好的控制算法验证平台,是对现实生活中非线性系统的很好抽象。 本设计对控制系统的实时性要求较高,尤其是软件层面。在硬件层面,AB32微控制器提供了强大的外设支持,运行的高速性也保证了算法运算的速度。并且RT-Thread操作系统强大的系统组件和开发环境支持也使得系统的实时性得以保证。
![]() yijuanzhi
yijuanzhi
![]() yijuanzhi
yijuanzhi
团队成员
yijuanzhi 工程师
本设计硬件上采用了减速电机,,霍尔编码器,高精度电位器,以及倒立摆相关的金属结构件(外购),硬件上采用了AB32开发板,同时使用了上位机助手来显示参数和系统运行状态。由于AB32开发板上已经引出了按键等简单的交互模块,所以没有额外增加更多的功能外设。
本设计软件上主要采用了RT-Thread操作系统,使用到了该系统中的UART设备,ADC设备,SPI设备,PWM设备,TIM设备等相关的软件设备驱动。
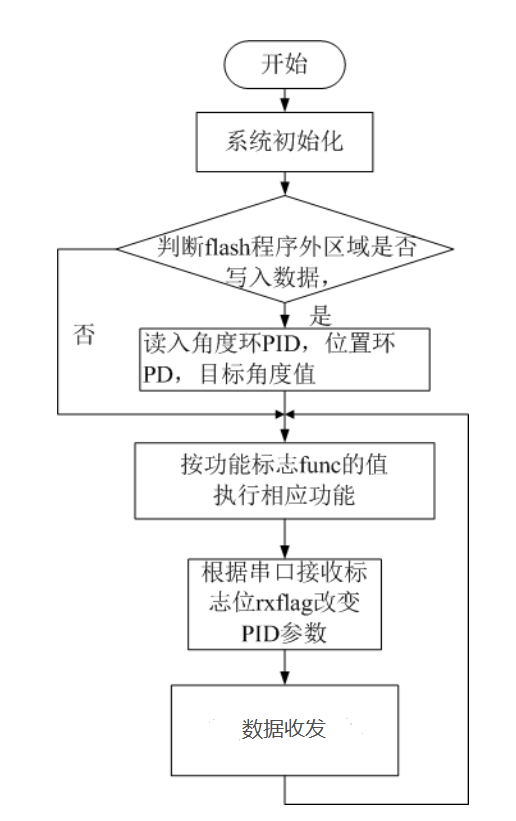
整体程序设计包括了两个线程,其中一个负责实时采集数据并进行运算,另一个负责实时传输和显示数据用于调试,同时根据用户输入状态来对参数进行切换与改变。在控制算法方面主要采用了PID算法,对实时速度和实时角度构建了两个双闭环的PID控制器,同时进行位置和角度的控制,实现倒立摆的自平衡。
广告合作
王婉珠
内容合作
黄晶晶
内容合作(海外)
张迎辉
关注我们的微信

供应链服务 PCB/IC/PCBA
江良华
投资合作
曾海银
社区合作
刘勇
下载发烧友APP







 工商网监
工商网监