聚丰项目 > 智能遥控小车
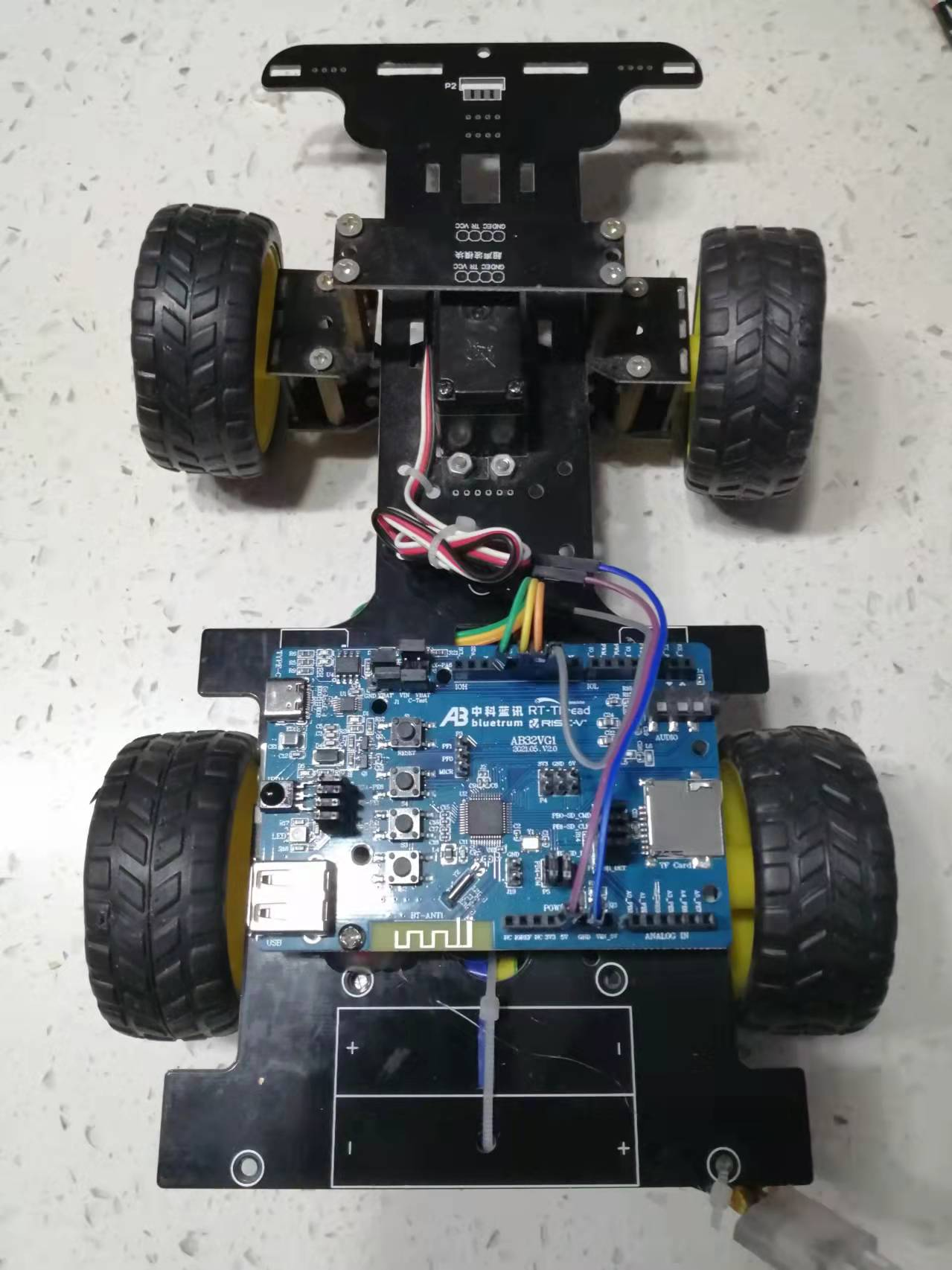
小车是电子大赛常用的装备,采用舵机转向,两个电机调速驱动的四轮小车,以前都是用ti’或stm32f1的板子做的,用RISC-V架构的芯片做一个小车的控制器应该没问题。这里利用AB32VG1开发板做核心控制元件,用无线串口通信,实现小车的遥控。
![]() OK起飞芜湖
OK起飞芜湖
![]() OK起飞芜湖
OK起飞芜湖
团队成员
OK起飞芜湖 学生
硬件部分主要包括以下三部分:
(1) 主控装置:AB32VG1开发板
(2) 驱动装置:四路(两路)电机驱动模块
(3)遥控通信:HC-HID
1.AB32VG1开发板
(1)开发平台:RT-Thread Studio
(2)组态配置
比例阀主要是采用PWM电流驱动,采用闭环控制可以提高控制精度,所以组态配置中使能PWM信号和ADC0通道。此外,在PWM信号上叠加震颤能提高比例阀的动态响应,降低滞环,所以使能了硬件定时器timer。
![]()
(3)主要代码
①舵机控制
int sg(int argc, char *argv[])
{
period1 = 10000000; /* 周期为10ms,单位为纳秒ns */
pulse1 = 0; /* PWM脉冲宽度值,单位为纳秒ns */
/* 设置LED引脚脚模式为输出 */
rt_pin_mode(SG_PIN_NUM, PIN_MODE_OUTPUT);
/* 拉高LED引脚 */
rt_pin_write(SG_PIN_NUM, PIN_HIGH);
/* 查找设备 */
pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
if (pwm_dev == RT_NULL)
{
rt_kprintf("steering gear control run failed! can't find %s device!\n", PWM_DEV_NAME);
return RT_ERROR;
}
/* 设置PWM周期和脉冲宽度默认值 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period1, pulse1);
/* 使能设备 */
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
if(argc <2)
{
/* 由0度到180度,然后由180度到0度,循环运行5个周期 */
t1 = 50;
while (--t1)
{
rt_thread_mdelay(1000);
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period1, period1-500000);
rt_thread_mdelay(5000);
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period1, period1-2500000);
}
}
else
{
/*将msh输入的字符转换为数值*/
pulse1 = Ascii2Hex(argv[1],strlen(argv[1]));
/* 计算舵机目标位置所需要的高电平脉冲宽度 */
t1 = 2000000/180*pulse1;
pulse1 = period1-500000-t1; //pwm设定的占空比为低电平宽度,舵机控制使用高电平宽度控制旋转角度
/* 设置PWM周期和脉冲宽度 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period1, pulse1);
}
}
void set_ang(uint8_t ang) //period-500000 对应0° , period-2500000 对应180°, 90°对中,
{static rt_uint32_t ang_pulse;
ang_pulse=1500000+ang/90*100000;
pulse1=period1-ang_pulse;
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period1, pulse1);
}
②行走电机驱动
int main(void)
{
uint8_t pin = rt_pin_get("PE.1");
rt_pin_mode(pin, PIN_MODE_OUTPUT);
uint8_t pin_dir1 = rt_pin_get("PA.0"); //电机方向控制
uint8_t pin_dir2 = rt_pin_get("PA.1"); //电机方向控制
rt_pin_mode(pin_dir1, PIN_MODE_OUTPUT);
rt_pin_mode(pin_dir2, PIN_MODE_OUTPUT);
rt_kprintf("Hello, world\n");
thread_serial1();
while (1)
{
rt_pin_write(pin, PIN_LOW);
rt_thread_mdelay(500);
rt_pin_write(pin, PIN_HIGH);
rt_thread_mdelay(500);
sg(0,"100000");
rt_thread_mdelay(1000);
tr(0,"2500000");
if(rec_ok==1) //收到命令
{
rec_ok=0;
if(rec_buf[1]=='L')// 左转角度
{ang_l=(rec_buf[2]-0x30)*10 +(rec_buf[3]-0x30);}
rt_kprintf("ang_l%d",ang_l);
if(rec_buf[4]=='R')// 右转角度
{ang_r=(rec_buf[5]-0x30)*10+(rec_buf[6]-0x30);}
rt_kprintf("ang_r%d",ang_r);
if(rec_buf[7]=='F')// 前进
{
rt_pin_write(pin_dir1, PIN_LOW);
rt_pin_write(pin_dir2, PIN_LOW);
}
if(rec_buf[7]=='N')// 空挡
{
rt_pin_write(pin_dir1, PIN_HIGH);
rt_pin_write(pin_dir2, PIN_HIGH);
}
if(rec_buf[7]=='R')// 后退
{
rt_pin_write(pin_dir1, PIN_LOW);
rt_pin_write(pin_dir2, PIN_HIGH);
}
if(rec_buf[7]=='T')// 刹车
{speed=0;
rt_pin_write(pin_dir1, PIN_HIGH);
rt_pin_write(pin_dir2, PIN_LOW);
}
speed=(rec_buf[8]-0x30)*10+(rec_buf[9]-0x30);
rt_kprintf("apeedl%d",speed);
clear_buf();
pwm_out(speed,speed);
if (ang_l>ang_r)
set_ang(-ang_l);
else {
set_ang(-ang_r);
}
}
}
}

通过串口调试助手发送小车控制命令,小车能实现前进、后退、左转、右转动作,也能控制小车的速度。
(0.36 MB)下载
 工商网监
工商网监