 电子发烧友App
电子发烧友App


自动驾驶的兴起改变了传统汽车毫米波雷达行业的面貌。
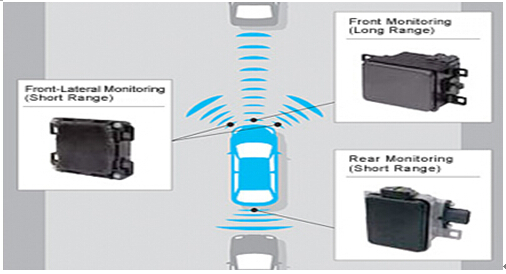
对前视和360度环绕感知的需求不断增加,促使汽车制造商根据车内外的应用,寻求最佳的射频性能、功耗、分辨率和尺寸。
而高角分辨率(也被称为点云成像)汽车毫米波雷达市场正在成为全球三大汽车芯片巨头(恩智浦、德州仪器和英飞凌)的下一个战场。其中,恩智浦和英飞凌是传统雷达芯片市场的TOP2,德州仪器则是近两年凭借单芯片集成方案杀入这个市场。
成像雷达是雷达的一个子集,它的名字来源于它的高角分辨率能够提供清晰的图像。角度分辨率是区分在相同距离和相同相对速度范围内的物体的能力,同时能够在高分辨率下识别静态对象。
半年前,恩智浦宣布与一家中国供应商合作,巩固其在中国毫米波雷达市场份额,同时帮助开发所谓的“成像雷达”。随着ADAS及ADS市场渗透率逐步提升,作为感知组合中不可缺少的传感器,汽车毫米波雷达的市场需求将出现爆发式增长。
恩智浦表示,向更高级别自动驾驶系统的升级,是汽车雷达大幅增长的主要原因。今天的量产新车通常在L1和L2级ADAS上使用1到3个毫米波雷达(前向和角雷达),而未来的L4和L5级自动驾驶车辆可能会使用多达6-10个毫米波雷达。
但与此同时,传统毫米波雷达的缺陷之一,低分辨率一直是困扰行业的关键瓶颈。但作为毫米波雷达芯片供应商,恩智浦相信,有一天毫米波雷达可以直接与激光雷达竞争。
而此次恩智浦的合作重点就是推动高分辨率成像雷达的量产开发。
一年前,恩智浦宣布全套雷达收发器完成了业界唯一基于BiCMOS和先进RFCMOS工艺技术的产品组合,基于S32R汽车雷达处理平台帮助业内开发从小型紧凑型雷达传感器到高分辨率成像雷达传感应用。
这款基于12通道TX和16通道RX设计的高分辨率成像雷达方案,使用多个MR3003雷达收发器集成,提供高输出功率、低噪声和实现高分辨率成像所需的可扩展性。该雷达方案能够同时跟踪数千个目标,实时感知周围环境,并达到L4和L5级自动驾驶的需求。
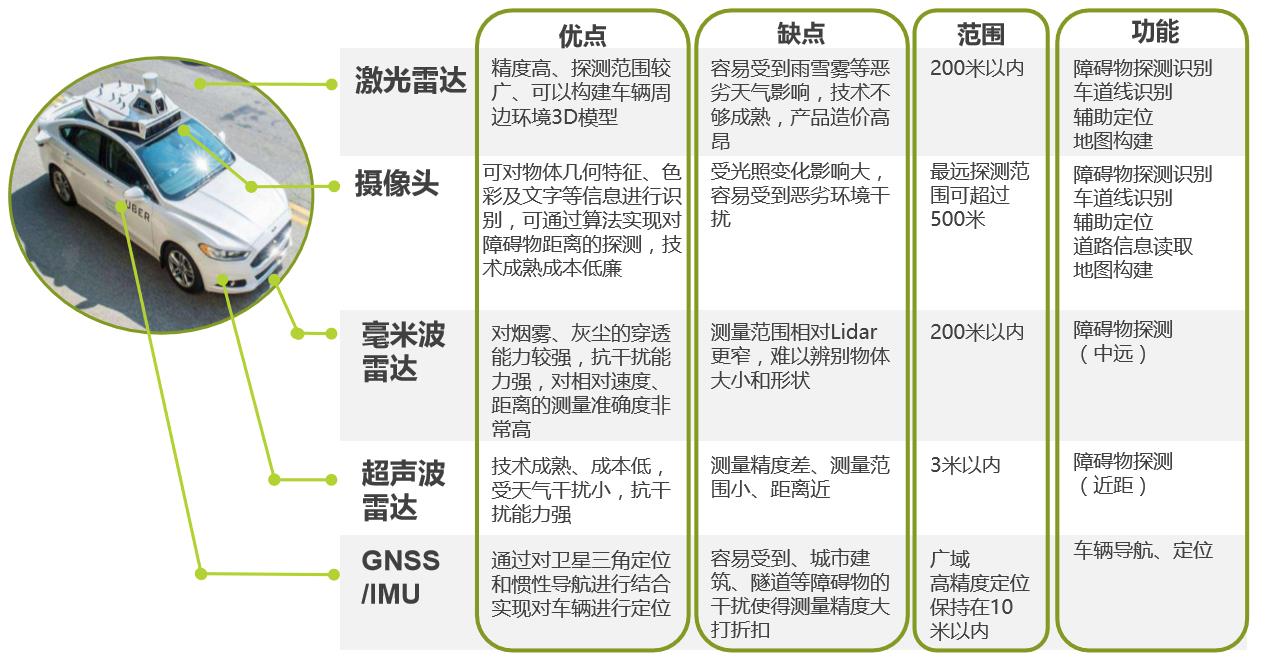
成像雷达被认为是将比其他传感器更具成本和性能的综合性价比优势,在某些情况下,成像雷达有可能识别道路上的物体,如自行车、人或小体积障碍物。同时,兼具应对恶劣天气状况的传统优势,至少到目前为止,摄像头、超声波和激光雷达都做不到。
近年来,许多一级汽车零部件供应商、芯片制造商,包括一些初创公司,都在研发成像雷达技术。大多数人认为它的成本将是激光雷达的五分之一,有的企业甚至声称可以把成本做到目前量产77GHz雷达的水平。
恩智浦表示,该公司对这项技术的发展寄予厚望。该公司相关负责人甚至表示,“我们的目标是大幅改进毫米波雷达性能,最好不需要激光雷达。”
成像毫米波雷达,也被定义为4D(3D空间+速度)成像,通过将分辨率提升至接近激光雷达的水平,既解决对小物体的识别,以及移动、静止物体的跟踪,同时,毫米波雷达的穿透力(超视距能力)是对激光雷达的缺陷弥补。
而市面上已经量产的77GHz雷达,返回的是被测目标的抽象图像,不能用于分类,比如确定他们是行人、骑自行车的人、动物、建筑物还是其他车辆。此外,对于静止目标的探测也缺乏相应的能力。
同时,在与视觉融合方面,4D毫米波雷达具备天然优势。点云毫米波雷达就可以把摄像头的短板很好地补上,对周边复杂环境可以3D实时建模,对行人车辆的精准距离和速度监测。
可见,成像雷达是唯一能在各种天气和能见度条件下保持鲁棒性,并在方位角和仰角上都能达到1度角分辨率(甚至在超分辨率算法下更低)的传感器。
几乎和恩智浦同一时间,德州仪器也推出了第一个高度集成的雷达传感器芯片AWR1642。与竞争对手不同的是,德州仪器通过增加一个微控制器单元和一个数字信号处理器,在同一个系统芯片上集成了多个收发单元。
该公司通过将4个单芯片AWR1243雷达前端设备串联起来,证明了它可以提供高达1.6度的角度分辨率,并可以检测250米以上的车辆。
今年,德州仪器再次推出升级版AWR1843,有7个通道,包括4个接收器(Rx)和3个发射机(Tx),以及一个MCU,一个DSP,都集成在同一个芯片和天线上。此外,通过将MCU和DSP放在同一个芯片上,并在芯片的顶部安装天线,大大减少PCB的占用空间,节省了近80%的空间。
而这种雷达的另一大应用场景,就是座舱内的人员及物体监控,如检测乘客或司机的姿势,甚至是手势识别,而不需要基于摄像头视觉(在欧美,摄像头监控一直存在个人隐私的风险)。
以AWR1843单芯片雷达传感器为例,通过安装在车顶,可以准确检测车内乘员,判断乘员是成人还是儿童。同时,分类软件可以输出每个座位上的乘员位置,具有较高的精度。
现在,作为传统雷达芯片巨头的英飞凌,也决定杀入汽车级成像雷达市场。这也意味着距离规模量产的时间日益临近。
几周前,高分辨率成像雷达初创公司傲酷雷达(Oculii)宣布,和英飞凌合作开发雷达软件解决方案,基于后者的AURIX MCUs、MMIC和电源硬件平台的芯片组合,以及傲酷雷达的虚拟孔径成像算法,以具有吸引力的价格提供高分辨率性能。
和大多数高分辨率雷达架构采用更多的物理天线和多芯片集成来提供更高的角度分辨率不同,傲酷雷达的专用虚拟孔径成像算法通过相位编码调制方案提高了阵列的角度分辨率,并基于更多的计算/内存实现更高的分辨率。
这意味着,该方案不需要更多的额外实体天线,因为这意味着更高的成本、尺寸和功率。傲酷雷达和英飞凌正在合作研发的解决方案,既可以为低成本的单芯片解决方案提供高性能优化,同时也可以量身定制多芯片高性能解决方案。
虚拟孔径成像算法是一个阵列乘法器,使MIMO雷达传感器的角度分辨率提高10倍以上,与现有的大规模量产的雷达相比,它可以提供低于1度的角分辨率。
这种方法的巨大优势是在硬件成本上和传统毫米波雷达类似的情况下,突破了角分辨率这个毫米波雷达最大的瓶颈,将催生出很多新的可能性。
比如,有了4D点云成像技术加持后,未来的前向雷达,在同等FOV情况下 ,可以达到0.1-0.2°角分辨率。同时,在探测距离300-400米时,也可以将车辆在哪个车道分辨清楚。
在英飞凌硅谷创新中心负责人看来,虚拟孔径成像技术与汽车级雷达解决方案相结合,可以在不需要多个有源收发器或昂贵的天线技术的情况下提高角度分辨率。
在此之前,英飞凌曾为谷歌提供过一款60GHz雷达芯片,用于高分辨率手势识别。谷歌则通过一种定制的机器学习模型来实现将数据转换成所谓的“快速手势识别”的能力。该芯片结合了调频连续波雷达和直接序列扩频雷达两种调制方式。还有多个波束形成天线,支持3D跟踪和成像。
目前,全球范围主要有两种点云成像雷达方案,一类是基于传统NXP、TI的CMOS雷达芯片,采用多芯片及天线集成或者软件虚拟方式来实现;另一类就是类似Arbe Robotics、Vayyar、SteradianSemi、RFISee等初创公司,直接提供成像雷达芯片。当然,还有一些企业利用超材料技术研发全新的雷达架构。
而成像雷达的下一步,就是提升机器学习的能力。
恩智浦在今年推出的一款车规级的AI工具包,除了应用于传统的视觉领域,未来的雷达有望使用神经网络根据其点云图像对道路使用者及障碍物进行分类。
这意味着雷达内部的芯片集成度越来越多。恩智浦在RF-CMOS收发器中集成了MCU,迈出了第一步。同样,德州仪器在集成DSP方面也走出了第一步,DSP能够将机器学习置于边缘侧,对物体进行分类、跟踪和计数成为可能。
同时,将DSP集成在一个组件中,与MCU和收发器相结合,可以减少互连损耗,加快处理速度。以IWR1642为例,DSP是一个600MHz的用户可编程C674x DSP,还集成了一个200MHz的用户可编程ARM Cortex-R4F处理器。
“过去因为雷达分辨率很低,你根本无法做任何与机器学习相关的后期处理。”一位行业人士表示,现在因为有了成像雷达,就有了基于机器学习来理解场景的能力。
初创公司Arbe从一开始就思考如何将信号处理和人工智能置于现成的射频芯片组和数字信号处理器DSP之上,随后他们自主研发了数字处理器和专用集成电路。
Arbe的专利,基于人工智能,后处理软件堆栈包括一个基于雷达的同步定位和地图(SLAM)解决方案的动力由人工智能。SLAM算法实现实时聚类、跟踪、自定位、假目标滤波、基于雷达和基于雷达相机的目标分类。
这套人工智能算法可以识别被检测到的对象是否是人,而不是树,并且计算出它将在一秒内的位置,因为这对自动驾驶的决策有很大的影响。同时,还需要消除虚假目标。在最后一个阶段,它还与摄像头和套件中的其他传感器融合,以对多个传感器中的探测对象进行分类和匹配。
现在,毫米波雷达正在迈进高分辨率+智能时代。
在改进激光雷达和视觉方面,行业已经做出了很大的努力,特别是距离和分辨率方面已经达到了一个性能阈值。然而,像雷达这样的其他传感器,相对来说过去几年并没有太大的性能提升。
要知道,三年前,特斯拉还专门从德尔福挖来了雷达系统负责人,目的就是改善雷达性能,比如能否得到粗糙的点云。彼时,马斯克的态度就已经很明确,雷达可以穿透雨、雾、雪和灰尘,是性价比最高的感知组合的选择。
这位负责人在加盟特斯拉前的两年时间参与了德尔福下一代雷达系统的开发。(不过,在特斯拉呆了两年后,投奔了福特旗下的自动驾驶公司Argo AI)
毋庸置疑的是,下一代雷达仍将是汽车上最强劲、最可靠、性价比最高的传感器之一。当然,我们更不能忽视华为基于5G技术的雷达杀进汽车行业。
而对于没有跟上这一波毫米波雷达革新浪潮的企业,不管你是传统巨头还是初创公司(仍停留于对标传统雷达,而没有提前布局下一代技术),被淘汰出局是迟早的事。
要知道,接下来几年时间,在感知硬件方面仍然有很多创新。同时,软件定义汽车的概念,同样在影响着传统零部件的革新。













 工商网监
工商网监
评论