 电子发烧友App
电子发烧友App


1 引言
车辆的转向性能直接影响到整车的机动灵活性、操纵稳定性和使用经济性。多轴转向技术通过改变前桥以外的其它桥转角,在低速转弯时改善汽车的灵活性、机动性,在中高速时改善汽车的操纵稳定性。通过改变汽车瞬时出现的过多转向或不足转向,增强汽车的动态稳定性,使汽车行驶更安全,避免汽车由于过多转向或不足转向造成失控。
2 多轴转向系统的实现原理
多轴转向系统的转向控制模式按其结构和执行机构的不同可分为机械式、液压式和电子式等。目前多轴转向装置已将机械、液压、电子、传感器及微处理器控制技术紧密结合在一起。针对某三轴全路面起重机多桥转向系统电控部分进行研究。由于系统的实时性较强,故采用了较为流行的CAN 总线控制方式。本文设计了一种高性能汽车电动式转向器的电控系
统部分。
3 电控系统硬件设计
基于 CAN 总线的多轴转向系统采用模块化设计,主要由主控模块和驱动控制模块组成。主控模块根据车辆的行驶姿态和多轴转向控制策略(采用零侧偏角比例控制策略)计算出各后桥的转角值;驱动控制模块则负责转向执行过程的控制。多轴转向主控模块电控单元根据传感器采集到的前轮转角信号和车速信号,经过预定的控制策略进行处理计算,得到后桥最佳转角值,同时将各桥转角值发送到总线上。控制执行模块的电控单元,经过辨认接收到各自的数据,经过PID 控制将转角值转化驱动比例电磁阀PWM 电压信号,控制执行液压缸活塞的位置,同时通过位移传感器将实时的液压缸位移值反馈给电控单元,使得后桥各转过的角度具有一定的精确度,从而实现多轴转向的目的。
3.1 多轴转向电子控制系统的总体概述
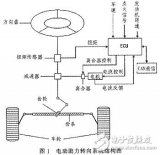
本文所设计的多轴转向电子控制系统主要由两个模块组成,每个模块又由三部分组成:传感器、电子控制单元(ECU)和执行机构。其设计主要包括传感器与控制器的选择、信号采集系统及其处理电路设计、CAN 控制与接收电路、执行机构及其驱动电路的设计。基于CAN总线多轴转向电控系统硬件框图如图1。
3.2 传感器的选择
(1) 车速传感器
霍尔车速传感器是一种基于霍尔效应的磁电传感器,具有对磁场敏感度高、输出信号稳定、频率响应高、抗电磁干扰能力强、结构简单、使用方便等特点,从而得到广泛的应用。其结构主要由齿圈、霍尔元件、永久磁铁和电子线路等组成。其原理如下图2 所示: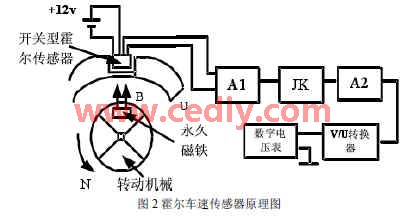
(2) 方向盘转角传感器
多轴转向控制系统中,需要前轮转角作为控制参数,由于前轮转角值较难获得,所以采用测量方向盘转角值,通过运算得出前轮转角值。
(3) 液压缸位移传感器
多轴转向控制系统中要获取后轮转角值来判断转向是否到位,由于直接测量后轮转角较为困难,而液压缸的位置与后轮转角一一对应,于是我们通过测量液压缸位移间接测量后轮转角,同时将转角值反馈回ECU 中。本文采用变阻式位移传感器。在微处理器的选择方面, 我们力求吸收国内外成熟产品宝贵经验,在进行了广泛的电子产品市场调研后,在综合性价比的基础上,本系统选用了PHLIPS 公司生产的8 位P89C52 系列单片机作为微处理器。
3.3 CAN 总线系统节点硬件电路设计
基于 CAN 总线多轴转向电控系统中CAN 总线节点的设计尤为重要。本文设计的CAN总线节点系统,采用P89C52 作为微处理器, 在CAN 通信接口中,CAN 通信控制器SJA1000,CAN 总线驱动器采用82C250。电路主要由四部分所构成:微控制器P89C52、独立CAN 通信控制器、SJA1000CAN 总线收发器82C250 和高速光电耦合器6N137。微处理器P89C52 负责SJA1000 的初始化,通过控制SJA1000 实现数据的接收和发送等通信任务。4 信号采集硬件电路设计
4.1 车速信号调理电路
多轴转向控制系统需要实时检测车速值,车速值的检测是由霍尔车速传感器将变速器输出轴的转速变换成不同频率的序列脉冲,单片机对脉冲序列进行计数,转换成当前的车速值。一般传感器产生的脉冲信号比较微弱,要通过放大电路处理成TTL 或CMOS信号输入单片机,但是车用传感器内部大都有信号处理电路,输出电压为车用电压范围,须调整后才能输入到单片机中。此外,从传感器得到的矩形脉冲经传输后往往发生波形畸变。利用施密特触发器状态转换过程中的正反馈作用,可以把边沿变化缓慢的周期性信号变换为边沿很陡的矩形脉冲信号。根据以上原理设计的车速信号调理电路如图3。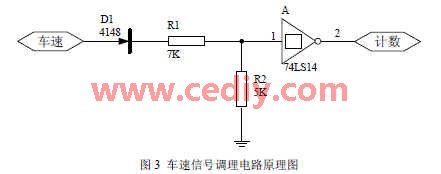
4.2 前轮转角信号调理电路
根据旋转编码器的工作原理,当方向盘转角发生变化时光电编码器便会发出A、B 两路相位差90°的数字脉冲信号。正转时A 超前B 为90°,反转时B 超前A 为90°。脉冲的个数与角度值成比例的关系,所以通过对脉冲的计数就可以得到方向盘转角的大小。考虑到汽车方向盘转动是双向的,既可顺时针旋转,也可逆时针旋转,需要对编码器的输出信号进行鉴相后才能计数。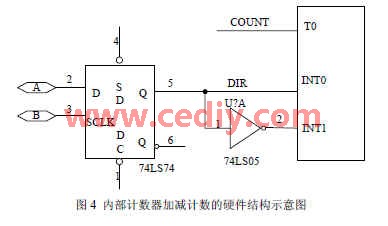
我们可以把经过D 触发器之后的脉冲即方向控制脉冲(DIR)接到单片机的外部中断INT0 端,经过反向器后再接到另一个外部中断INT1,并把计数脉冲A 接到单片机的片内计数器T0 端即可。相对外部计数芯片来说,使用这种方法时电路相对要简单得多。系统工作时,先要把两个中断设置成低电平触发,并打开相应的中断。当DIR 高电平时,表示方向盘顺时针旋转,INT1 中断,执行相应的中断程序,进行加计数;而当DIR 低电平时,表示方向盘逆时针旋转,INT0 中断,执行相应的中断程序,进行减计数(实际是重赋值,进行加计数)。图4 为内部计数器加减计数的硬件结构示意图。
4. 3 液压缸位移信号调理电路
电控系统中需要时刻检测后轮转角的当前值,与目标转角值比较,得出偏差e( t),生成PWM 信号,直到偏差e (t)在允许范围内。后轮转角的测量是通过测量液压缸的位移值间接得到。位移信号属于模拟信号,P89C52 单片机中没有A/D 转换模块,需外接A/D 转换电路。采用8 位的AD678 来完成。AD678 的优点在于它的模拟信号输入的极性非常容易控制,且引脚连接简便。
4.4 驱动执行硬件电路设计
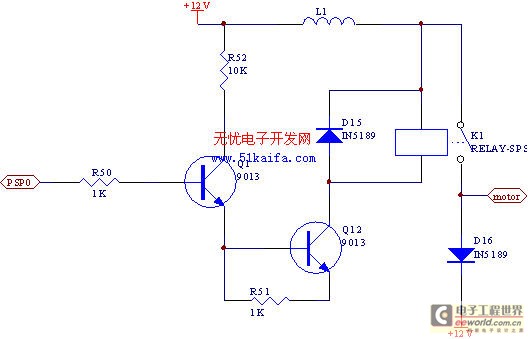
4.4.1 比例电磁阀驱动电路
通常单片机输出的开关电压信号最大值为 5V,且根据MCS-51 系列芯片输出的电气性能可知,其输出电流不宜超过15mA,不足以驱动比例阀的电磁铁。故必须要有一个驱动功率放大器,把开关电压信号加以放大,使在电磁线圈中产生足够的激磁电流。对于比例方向阀,为了加快电磁线圈的电流响应速度,必须采用快速驱动电路,即电流的增长和消退都非常迅速的电路。本文采用如图7 所示的VMOS 功率场效应管为主构成功率放大器电路原理图。该电路驱动功率大,响应时间在毫秒级,单片机与功率级之间隔离良好。在电路图5 中,输入部分和输出部分采用两套相互独力的电源,且不共地,没有电气联系,从而实现了电气隔离。
4.5 其它外围电路设计
4.5.1 电源电路
电源模块是将车载电源通过 DC/DC 变换转换成控制系统所需要的电压,车载电源为12V或24V,单片机系统工作电压为5V。DC/DC 转换器种类繁多,本系统采用78L00 系列的78L05进行降压。78L00 系列DC/DC 转换器电路简单实用,只需要另加两个电容就可以构成转换电路。78L05 的输入范围为7V-24V,输出电压为5V。
4.5.2 复位电路
在一般的计算机系统中,为防止系统在加电、电源突然掉电以及电网瞬时欠压而引起误动作,需要有可靠的复位电路和电源监视电路。
本文作者创新点
本文针对多轴转向系统实时多任务特性,提出了基于CAN 总线的多轴转向技术,以确保车辆在转向状态下的安全稳定性及后桥转向的快速跟随特性;论文设计了包括主控模块和控制执行模块在内的多轴转向电控单元。













 工商网监
工商网监
评论