 电子发烧友App
电子发烧友App


一种预防汽车追尾碰撞报警系统的设计
摘要:介绍了预防公路追尾碰撞报警系统,系统由信息采集单元、中央控制单元、报警电路和显示输出单元构成。信息采集单元由4种传感器完成对车辆运行状态信号采集,中央控制单元对输入信息进行分析、处理,完成防碰撞预测与判断功能,报警电路产生警报,提醒驾驶员采取措施以避免追尾碰撞事故发生,系统还具备显示功能。
0、引言
近年来,中国经济得到迅猛发展,私家车拥有量快速增长,公路建设也快速发展,与此同时,交通事故频发,原因是多方面的,诸如路况差,车速高引起驾驶员视觉变差,气候条件差等。其中,事故中追尾碰撞居首位,所以预防交通事故主要是预防汽车追尾碰撞。
鉴于此,本文讨论了如何预防汽车追尾碰撞报警系统的设计。
1、系统总体方案设计
如图1所示,系统是由信息采集单元、中央控制单元、报警电路和显示输出单元构成。
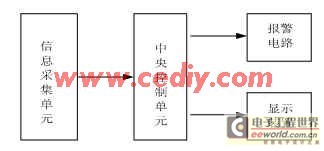
图1、系统结构框图
1.1 信息采集单元
传感器是信息采集系统单元重要部分,传感器是指能够感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置,从而完成检测任务。它可将对象特性或状态参数转换成可测量,然后将此信号送入传感器系统加以处理[1]。最后将引起控制系统发生变化的原因转换为电信号后传输给控制单元进行分析与处理。
信息采集单元由测距传感器、速度传感器、制动踏板位置传感器及路面情况选择开关组成,用来采集路况和车辆的运行状态等信息。
一、测距传感器
系统采用脉冲式光电传感器测定距离。本文利用光电传感器的时差测距原理进行工作,即:利用测量往返脉冲间隔时间来获知距离,测量脉冲间隔方法是在确定时间起止点之间用时钟脉冲填充计数,如图2所示:恒定光源D发出的光投射于目的物O,然后反射至光电元件B,根据发射和接收之间的时间差距测出距离,这种方法可以得到较高的测试精度。

图2、 时差测距原理图

图3、 距离计数原理图
二、 速度传感器
车速传感器是利用霍尔效应的原理制成的。即在半导体霍尔器件中,当磁力线穿过通电的霍尔元件时,会引起霍尔元件电荷的偏移,在元件中引起霍尔电压UH值发生相应变化,形成脉冲,霍尔传感器便会输出转速信号,经放大整形电路输出整齐的脉冲信号,利用单片机的外部计数接口,检测脉冲数,就可以计算出车辆的运动速度。因此,对汽车车速的测量实质上是对转速信号的频率的测量。

图4、霍尔转速传感器
三、制动踏板位置传感器
该传感器用来判断驾驶员在接收到报警或已认识到危险时,是否采取了制动措施降低车速。如已制动,则对报警进行抑制。制动传感器直接从车辆制动指示灯回路中提取电位信号,处理后,作为车辆制动信息的标志信号送入控制单元。
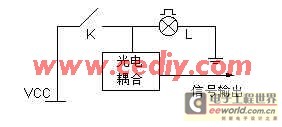
图5、制动踏板位置传感器
四、路面情况选择开关
本系统采用手动式三触点路面选择开关,用来选定路面摩擦系数,路面摩擦系数随路面情况的不同而变化。驾驶员应根据当时的路况来选择,从而选择相应的开关位置。

图6、路面选择开关
五、传感器的测量误差和补偿方法
在实际应用中,存在多种因素影响起测量精度,造成测量误差的主要因素主要有两类:一类是半导体固有特性,另外一类是半导体的制造工艺的缺陷,表现为零位误差和温度误差。
零位误差主要是由半导体制造工艺问题引起的不等位电势造成的,为了消除或减小不等位电势,可采用图7所示电桥平衡原理进行补偿。而温度误差是由于半导体材料的电阻率、迁移率和载流子浓度等随温度变化引起,这种变化程度随不同半导体材料有所不同,针对温度变化对传感器输出或输入内阻的影响,可采用输出回路并联电阻或输入回路串联电阻进行补偿。[6]
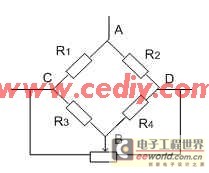
图7、不等位电势补偿电路
1.2 中央控制单元、警报输出单元及显示装置
中央控制单元是控制系统的中枢,是系统中的信息处理部分,传感器输入信息在这里进行处理、分析,完成防碰撞预测与判断功能,危险时发出信息给报警输出装置,实现报警,提醒驾驶员采取减速、制动等措施,,避免追尾碰撞事故发生。
系统采用ISP-Flash系列单片机 AT89S8252,它是一个低电压,高性能CMOS 8位单片机,片内含8k bytes的Flash只读程序存储器和256 bytes的随机存取数据存储器,兼容标准MCS-51指令系统,功能强大,它可将信息采集单元收集到的信息进行处理,并根据情况向显示装置及警报输出单元输出控制信号。
报警输出单元电路由三极管外加扬声器等外围电路构成,当中央控制单元通过分析确定前方存在追尾碰撞隐患时,便产生一定的信号驱动扬声器发出警报,提醒驾驶员注意以采取必要的措施。同时,系统中的显示装置,可由芯片MCS14495驱动数码显示屏显示。
2、结束语
文章创新点在于(1)较详细的描述了数据采集系统中每个传感器的工作原理图形及具体应用原理,选用的ISP-Flash系列单片机AT89S8252功能强大。(2)对整个传感器的测量误差做了分析,并提出了具体的误差补偿解决方法。整个方案较好地完成了预防汽车追尾碰撞系统的设计,此外,还需考虑虚报警情况等。总之,汽车追尾是一个复杂的系统工程,追尾过程的发生受主观、客观因素的影响。总体看来,整个设计方案较为合理,并可通过完善运用到实际应用中。











 工商网监
工商网监
评论