由于DSP将超强的高速实时处理能力和丰富的外设功能集于一身,目前,以DSP为核心的嵌入式运动控制器已经成为开放式运动控制器的发展主流,并获得广泛的应用。本文通过 对运动控制
2011-10-24 16:09:54 3189
3189 
目前工业机器人的发展趋势一是协作,二是多轴。所谓机器人的多轴驱控,即机器人在运行时需要准确地把控每一个轴的移动。多轴机器人意味着有更多的自由度,完成几乎任何角度和轨迹的运动作业。6轴机器人是目前工业
2022-03-15 07:47:005239 电子发烧友网报道(文/李弯弯)人形机器人控制器是人形机器人中的核心神经系统,负责对机器人的运动进行细致规划和控制,是机器人性能的决定性因素之一。 控制器通过软件和硬件的紧密结合,实现对机器人运动
2024-08-26 07:57:0010017 机器人运动控制技术,尽管运动控制器需求增长迅速,但即便到明年,整体市场规模仍不到 10 亿元。高性能工业机器人作为核心装备,一直被国外品牌垄断,而运动控制器的自主可控一直是国产机器人领域的一大痛点
2021-07-28 07:33:29
机器人的运动原理还是属于最基本的简单机械。机器人运动主要是依靠什么装置?有些什么装置是机器人用的比较多的?
2015-02-03 11:22:01
或霍尔效应设备等用以反馈执行器的位置到位置控制器,以实现和位置控制环的闭合。众多机械部件用以将执行器的运动形式转换为期望的运动形式,它包括齿轮箱、轴、滚珠丝杠、齿形带、联轴器以及线性和旋转轴
2016-05-07 19:22:19
控制器 : 运动控制是自动化的一个分支,它使用称为伺服机构的一些设备如液压泵,线性执行机或者是电机来控制机器的位置和/或速度。运动控制在机器人和数控机床的领域内的应用要比在专用机器中的应用更复杂,因为后者
2022-03-03 15:43:50
运动控制器就是控制电动机的运行方式的专用控制器:比如电动机在由行程开关控制交流接触器而实现电动机拖动物体向上运行达到指定位置后又向下运行,或者用时间继电器控制电动机正反转或转一会停一会再转一会再停
2019-06-03 17:24:58
254 个)控制器和PC/触摸屏组成控制网络;也可应用于需要独立运行的场合。 DMC600M 系列运动控制器,其硬件结构基于高性能 DSP 为控制核心、FPGA 协处理,插补算法、脉冲信号产生及加减
2019-09-12 11:36:00
和灵活性,可实时完成运动控制过程中复杂的逻辑处理和控制算法,能实现多轴高速高精度的伺服控制。本文选用DSP与FPGA作为运动控制器的核心部件,设计了通用型运动控制器。其中DSP用于运动轨迹规划、速度控制
2019-07-31 08:15:26
。运动控制在机器人和数控机床的领域内的应用要比在专用机器中的应用更复杂,因为后者运动形式更简单,通常被称为通用运动控制,运动控制器的发展与之相适应,其发展趋势向多轴化、网络化、开放式、智能化、可重构性等方...
2021-09-07 07:40:34
HCTL-2020 解码器及其在多关节机器人运动控制中的应用编码器位置检测通道的扩展是多轴运动控制系统开发中经常遇到的技术问题。该文详细介绍了HCTL -2020 解码器的工作原理,设计了它与DSP
2009-12-17 16:12:31
通常情况下,我们所说的机器人伺服系统是指应用于多轴运动控制的精密伺服系统。一个多轴运动控制系统是由高阶运动控制器与低阶伺服驱动器所组成,运动控制器负责运动控制命令译码、各个位置控制轴彼此间的相对运动
2020-09-02 14:36:11
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
2023-12-21 20:03:18
机器人维修的型号如下:RCX240S 雅马哈机器人控制器 ABB点焊机器人IRB 6650SABB焊接机器人IRB6640IDABB 焊接机器人IRB2400ABB焊接机器人IRB2600ABB
2020-10-31 17:15:17
项目名称:工业机器人多轴控制系统试用计划:理由:加大目前使用控制器芯片国产化。替换目前使用的CycloneII做硬件插补电路和外围IO扩展。代码算法移植预计8月份完成,10月份完成波形仿真时序分析,12月份正式进入量产阶段。
2019-06-03 18:02:34
申请理由:运动控制卡是伺服控制系统的核心,在数控机床、机器人等领域有着重要的应用。广泛的应用。项目描述:本项目设计了基于PCI总线的低成本、开放式可同时控制四轴交流或直流伺服电机的运动控制卡。该运动
2015-10-29 14:14:42
申请理由:采用DSP作为控制器,控制六轴工业机器人机械臂的运动。项目描述:本人研究生二年级,往算法控制方向进行研究。我的计划是首先学习DSP,因此很是想拥有一个属于自己的DSP开发板,也计划着手用此
2015-09-10 11:15:16
。比如电动机在由行程开关控制交流接触器而实现电动机拖动物体向上运行达到指定位置后又向下运行,或者用时间继电器控制电动机正反转或转一会停一会再转一会再停。运动控制在机器人和数控机床的领域内的应用要比在
2021-08-02 10:04:58
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个CPU,进行插补运算和伺服控制处理,实现给定的运动,并向主机反馈信息。根据作业任务要求的不同,机器人的控制方式又可分为点位控制、连续轨迹控制和力控制。`
2017-08-09 16:30:09
机器人,各占了市场很大的比率。一、单轴机器人在国内又被称为直线模组,直线运动模组,线性运动模组,电动滑台等,是一种能提供直线运动的机械结构,能够完成精确定位,快速定位运动控制,同时可通过组合完成更加
2017-11-23 10:17:45
运动控制器主要应用于工厂里面运转的机器,它能使机器运转起来从而帮助企业完成某项生产任务,间接地帮助企业产生利润。大家通过产品的名字—运动控制器,就应该知道它能对机器进行相应的控制,但是大家对于里面
2021-12-29 11:26:19
数控系统的发展趋势。本运动控制器采用TI公司的高性能浮点DSP作为主控芯片,通过ISA接口与PC协调并进行数据交换,以PC计算机作为基本平台,以DSP高速运动控制卡作细插补、伺服控制的核心,对直线电机的运动进行控制,取得了良好的实际应用效果。
2019-06-18 06:39:25
数控系统的发展趋势。本运动控制器采用TI公司的高性能浮点DSP作为主控芯片,通过ISA接口与PC协调并进行数据交换,以PC计算机作为基本平台,以DSP高速运动控制卡作细插补、伺服控制的核心,对直线电机的运动进行控制,取得了良好的实际应用效果。
2019-06-18 08:13:08
和网络技术的不断发展,运动控制器已从以单片机和微处理器作为核心的运动控制器和以专用芯片(ASIC)作为核心处理器的运动控制器,发展到了基于PC机平台的以数字信号处理器(DSP)和现场可编程门阵列
2019-09-04 07:10:42
和网络技术的不断发展,运动控制器已从以单片机和微处理器作为核心的运动控制器和以专用芯片(ASIC)作为核心处理器的运动控制器,发展到了基于PC机平台的以数字信号处理器(DSP)和现场可编程门阵列
2019-08-30 08:27:17
基于DSP与FPGA的运动控制器设计 设 计 了 一 种 基 于 和 的 四 轴 伺 服 电 机 运 动 控 制 器 该 控 制 器 选 用 与 作为 核 心 部 件 针 对 运 动 控 制 中
2012-08-11 11:54:11
基于DSP与FPGA的运动控制器设计设计了一种基于DSP和FPGA的四轴伺服电机运动控制器,该控制器选用DSP与FPGA作为核心部件。针对运动控制中的一些具体问题,如高速、高精度、实时控制等,规划
2009-09-19 09:43:00
一。引言 机器人研究是自动化领域最复杂。最具挑战性的课题,它集机械。电子。计算机。材料。传感器。控制技术等多门学科于一体,是多学科高技术成果的集中体现。而仿人步行机器人技术的研究更是处于机器人课题
2020-08-19 06:57:09
研究了一种用FPGA技术实现三轮全方位移动机器人运动控制系统的方法,与双DSP结构,DSP+CPLD结构,以及DSP+专用集成电路结构等相比,该方法具有简单可靠,扩展性强等特点。且FPGA设计简单,使用方便,开发周期短,能够实现真正的SOPC系统。
2019-10-22 07:35:19
工业生产中,传统的工业机器人在生产适用性上已经不能满足日益增长的多任务需求,多轴机器人顺势发展,趋势明显。多轴机器人是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系
2020-07-29 06:57:04
操作和类机器人功能,使加工过程实现完全自动化。 机器设计人员面临的挑战是如何让多个伺服驱动轴的操作和运动方案同步,从而在维持产品质量不变的同时,使机器吞吐效率最大化。精密运动控制控制现代工厂所用自动化
2016-01-25 16:48:48
的逻辑处理和控制算法,能实现多轴高速高精度的伺服控制。利用DSP与FPGA设计运动控制器,其中DSP用于运动轨迹规划、速度控制及位置控制等功能;FPGA完成运动控制器的精插补功能,用于精确计算步进电机或伺服驱动元件的控制脉冲,同时接收并处理脉冲型位置反馈信号。那么,我们具体该怎么做呢?
2019-08-06 06:27:00
其设计是机器人研究的核心。该控制系统通常以MCU、 DSP等为核心,采用上、下位机二级分布式结构。其中上位机一般为PC机,下位机为单片机或DSP等微控制器。但随着移动机器人的智能化,控制方法的发展,所需
2019-07-30 07:02:31
席文姣,陈帝伊,马孝义(西北农林科技大学 水利与建筑工程学院,陕西 西安712100)0引言如何设计智能灭火机器人控制器?控制器是智能机器人处理和控制信息的主体,它直接决定了机器人的行为和性能
2019-07-31 06:23:18
为解决精密制造对低成本、可移植性强的通用型多轴数控系统的迫切需求,给出一种基于ARM微处理器S3C2440和专用DSP运动控制芯片PCL65045BL组合的嵌入式四轴运动控制器。
2021-04-20 06:23:57
工业机器人控制器功能多任务功能一台机器人可进行多个任务的操作;
2019-09-12 09:10:22
工业机器人一般由主构架(手臂)、手腕、驱动系统、测量系统、控制器及传感器等组成。 1图是工业机器人的典型结构。机器人手臂具有3个自由度(运动坐标轴),机器人作业空间由手臂运动范围决定。手腕是机器人
2015-01-19 10:36:12
、以及内部传感器等组成。它的任务是精确地保证末端操作器所要求的位置,姿态和实现其运动。[img][/img]控制器是机器人的神经中枢。它由计算机硬件、软件和一些专用电路构成,其软件包括控制器系统软件
2017-12-15 10:25:19
这种机器人的控制器有哪些,多轴运动控制卡可以吗
2013-01-09 16:46:17
求一份四轴运动控制器解决方案,实现四轴直线、圆弧插补,U轴随动,
2013-08-20 13:28:50
描述相扑机器人控制器我的 Sumo 机器人比赛项目,我使用了 ATmega2560 -16au 微控制器和 BTN7960B 电机驱动器、6 轴加速度计和陀螺仪,并且我为您将在机器人中使用的传感器
2022-06-28 06:38:47
该控制器以DSP和FPGA为核心器件,针对运动控制中的实时控制、高精度等具体问题,规划了DSP的功能扩展,并在FPGA上扩展了功能相互独立的四轴运动控制电路。该电路实现了四路控制信号输出,四路编码
2019-06-14 08:30:00
控制器的主要作用是完成多轴运动的计算与控制,因此机器人控制器的主控就需要拥有高性能的CPU、内置实时操作系统、支持EtherCAT工业总线以及丰富的功能接口。 机器人控制器 基于以上需求,飞凌
2023-02-24 17:05:21
六轴传感器主要适用于需要测量和监控物体在三维空间中的运动、速度、方向和姿态的场景。应用场景非常广泛,涵盖了许多不同的领域和行业。具体的应用包括但不限于:1.机器人控制:六轴传感器可以被安装在机器人
2024-11-29 08:57:48
集运动控制器、机器人控制系统和六轴伺服驱动于一体
⚫ 体积小、功率密度高、集成度高,适合20KG以下机器人 ⚫ 采用多自由度和非线性控制算法,实现高动态响应、高精度的电流、速度及位置控制⚫ 支持
2023-09-07 07:57:07
ISP多媒体接口,适合构建机器人视觉-运动融合系统,实现工件识别与动态定位。
3. 支持闭环控制与误差校正
可结合高分辨率编码器反馈数据,运行机器人闭环控制算法;
利用AI 协处理器实现机器人误差
2025-11-14 15:48:29
运动控制器有专用的持续运动控制指令,运动控制器持续发脉冲,控制轴以指定的速度和方向持续运动,持续运动常用的指令为VMOVE,以运动速度SPPED持续运动,此时停止轴运动使用CANCEL或
2023-02-17 14:03:36
介绍一种基于 DSP的多轴运动控制器的设计方案,包括控制器的各部分组成及功能,并给出相应的示意图。此种控制器设计具有集成度高、运算速度快、处理能力强等特点。
2009-04-03 10:53:24 37
37 由于DSP将超强的高速实时处理能力和丰富的外设功能集于一身,目前,以DSP为核心的嵌入式运动控制器已经成为开放式运动控制器的发展主流,并获得广泛的应用。本文通过对运
2009-08-13 08:39:5713 根据智能机器人的控制要求,提出了机器人控制系统的顶层核心控制器和底层运动控制器的双层结构,底层与顶层基于CAN 总线完成关节状态信息的上传和运动指令的下达。在此基础
2009-12-16 16:39:4029 中图仪器GTS机器人运动轴激光跟踪校准检测仪是高精度、便携式的空间大尺寸坐标测量机,是同时具高精度(μm级)、大工作空间(百米级)的高性能光电测量仪器。 GTS机器人运动轴激光跟踪校准
2024-06-26 14:44:58
基于DSP与FPGA的运动控制器设计
运动控制技术是数控机床的关键技术,其技术水平的高低将直接影响一个国家装备制造业的发展水平。目前,多轴伺服控制器越来越多地
2009-10-25 15:28:471638 基于DSP仿人机器人关节控制器设计
0 引 言 仿人机器人具有可移动性,具有很多的自由度,包括双臂、颈部、腰部、双腿等,可以完成更复杂的任务,
2009-11-24 09:36:491515 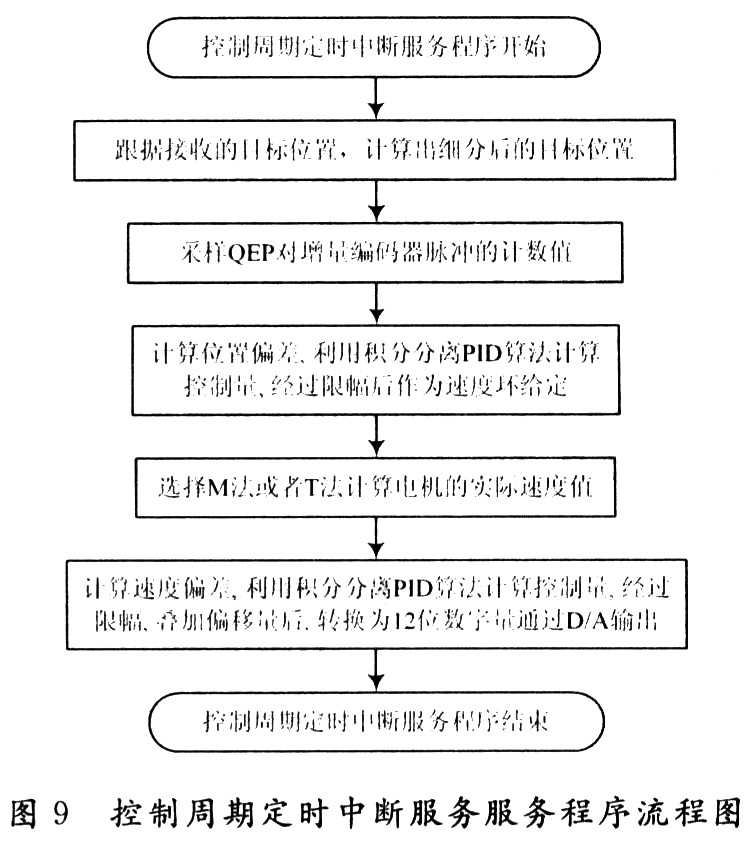
基于DSP的运动控制器的开发
运动控制器是一种用于多种运动控制场合的上位控制单元,通常采用专业运动控制芯片或高速DSP来控制步进电机或伺服电机。运动控制器
2009-12-25 09:44:072332 
MCX系列运动控制器是日本NOVA公司设计的专用电路,其中MCX314As是NOVA公司最新的推出的4轴运动控制器,是对MCX314功能的改进和增强
2011-02-19 11:02:277552 
摘要:本课题以永磁同步电机为执行电机,采用三闭环位置伺服控制方案,直轴电枢电流为0的矢量控制策略,制作了以DSP为处理器的运动控制器;采用ACPM750E为电机功率驱动模块,进行相应控制程序的设计。实验结果表明基于DSP的机器人关节控制器的运动误差在0.5%
2011-02-26 00:11:5954 设计了一种基于DSP与FPGA的运动控制器。具有结构简单、开放性、模块化等特点,能够较好的满足运动控制器的实时性和精确性。
2012-02-27 15:34:305565 设计了一种基于DSP与FPGA的运动控制器。该控制器以DSP为控制核心,用FPGA构建运动控制器与传感器以及电机驱动器的接口电路。充分发挥了DSP强大的运算能力和FPGA的并行处理能力。具有
2012-10-26 15:21:5193 分析了运动控制器对机器人的重要性;提出了一种高性能的基于DSP芯片的运动控制器的整体设计方案,该控制器集控制电路、数据采集模块和驱动电路于一体,能够很好的完成机器人运
2013-05-27 17:16:2577 机器人多传感器测距系统研究与设计......
2015-12-23 14:46:4910 机器人多传感器信息融合测距系统设计....
2015-12-23 15:00:2416 基于DSP的多轴运动控制器的研究与设计。
2016-03-29 14:11:487 基于DSP与FPGA的运动控制器设计,下来看看。
2016-05-10 11:24:3332 设计了一种基于DSP 和FPGA 的四轴伺服电机运动控制器,该控制器选用DSP 与FPGA 作为核心部件。针对运动控制中的一些具体问题,如高速、高精度、实时控制等,规划了DSP 的功能扩展,在
2017-09-21 11:24:5210 传统的机器人运动控制器大部分是以嵌入式单片机为核心的,但其运算速度和处理能力远不能满足机器人控制系统飞速发展的需要,日益成为阻碍机器人技术进步的瓶颈。随着以电子计算机和数字电子技术为代表的现代高技术
2017-10-23 14:36:282 的逻辑处理和控制算法,能实现多轴高速高精度的伺服控制。本文选用DSP与FPGA作为运动控制器的核心部件,设计了通用型运动控制器。其中DSP用于运动轨迹规划、速度控制及位置控制等功能;FPGA完成运动控制器的精插补功能,用于精确
2017-10-25 11:31:313 1 运动控制器硬件结构 本运动控制器的硬件结构主要分为如下几个模块:DSP+CPLD 主控模块,包括 DSP 核心 模块和 CPLD 驱动与扩展模块;通信接口模块,包括 PCI 总线、USB 总线
2017-11-03 10:30:472 运动控制器是利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服电机的多轴协调控制。目前采用运动控制器的数控系统已成为新一代数控技术发展潮流,运动控制器将成为未来数控系统的核心。
2018-04-24 18:41:572368 据调查,目前将DSP应用于机器人控制系统的方案,通常是将机器人位置控制中运动学计算任务交给PC机完成,PC机将计算结果(机器人各关节的转角)下载到以DSP芯片为核心的电机控制器,实现机器人控制眼演
2019-06-20 08:02:002803 
,以期对工业机器人的应用起到一定的参考。 1. 机器人运动轴 工业机器人在生产中,一般需要配备除了自身性能特点的外围设备,如转动工件的回转台,移动工件的移动台等。这些外围设备的运动和位置控制都需要与工业机器人相配合
2018-12-21 18:07:018656 
工业机器人在生产中,一般需要配备除了自身性能特点的外围设备,如转动工件的回转台,移动工件的移动台等。这些外围设备的运动和位置控制都需要与工业机器人相配合并要求相应精度。通常机器人运动轴按其功能可划分为机器人轴、基座轴和工装轴,基座轴和工装轴统称外部轴。
2019-04-02 15:26:0086950 上位机和下位机的通讯。与原控制器相比,该控制器具有较高的集成度和优良的性价比,便于降低成本减少机电系统体积。试验表明,该控制器性能稳定可靠,可满足机器人多轴控制的需要。
2021-05-07 09:30:5411 以 TMS320LF2407A 和 MCX314As 运动控制芯片为核心硬件, 自主研发了基于 TMS320LF2407A 和 MCX314As 的多轴运动控制器, 该控制器能够实现 4 轴位置
2021-05-19 15:17:1825 基于DSP控制器的油气安全智能巡检机器人
2021-06-22 16:41:3643 正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位等等。
2022-05-20 16:51:007860 
XPLC006E是正运动运动控制器推出的一款多轴经济型EtherCAT总线运动控制器,XPLC系列运动控制器可应用于各种需要脱机或联机运行的场合。
2022-06-30 09:09:386459 
运动控制器主要分为三类,分别是PC-based、专用控制器、PLC。其中PC-based运动控制器在电子、EMS等行业被广泛应用;专用控制器的代表行业是风电、光伏、机器人、成型机械等等;PLC则在橡胶、汽车、冶金等行业备受青睐。
2023-04-10 12:56:433046 典型的运动控制器卡和模块包括运动控制IC、微处理器以及用于处理高速编码器信号的DSP或定制ASIC。控制器向驱动器或放大器提供速度和旋转方向信号,进而提供适当的电压和电流(功率)水平来操作电机。要设计具有反馈的鲁棒且容错的运动控制系统,必须在设计期间在系统级别解决以下事项:
2023-06-12 14:51:111565 
机器人控制器是机器人系统的核心部件,负责接收来自PLC或其他传感器的指令,并根据这些指令控制机器人的运动和操作。机器人控制器通常具有强大的计算能力、实时反馈和高精度运动控制功能,使得机器人能够完成复杂的任务,如装配、焊接、搬运等。
2023-07-10 11:07:013852 运动控制器是一种电子设备,通常与运动控制软件配合使用,用于控制机器人、数控机床和其他自动化设备移动或执行各种任务。运动控制器主要由一台计算机和相关的硬件组成,如数字信号处理器(DSP)和模拟/数字
2023-07-31 17:42:411453 
运动控制器是一种电子设备,通常与运动控制软件配合使用,用于控制机器人、数控机床和其他自动化设备移动或执行各种任务。运动控制器主要由一台计算机和相关的硬件组成,如数字信号处理器(DSP)和模拟/数字
2023-09-21 08:08:391842 全国产EtherCAT运动控制边缘控制器的轴参数设置与单轴运动例程讲解。
2023-09-27 15:42:261990 
全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立式运动控制器,最多支持32轴运动控制,同时支持正运动远程HMI功能,能提供网络组态显示,可实时监控和调整参数配置。
2023-10-16 09:49:532100 
电子发烧友网站提供《基于DSP的工业机器人控制器的设计与实现.pdf》资料免费下载
2023-10-23 09:51:241 PCL6045BL是一种新型专用DSP运动控制芯片,它具有强大的数据处理能力和较高的运行速度,可以实现高精度的多轴伺服控制。为解决精密制造对低成本、可移植性强的通用型多轴数控系统的迫切需求,文中给出一种基于ARM 微处理器S3C2440与DSP运动控制芯片
2024-05-03 10:44:001058 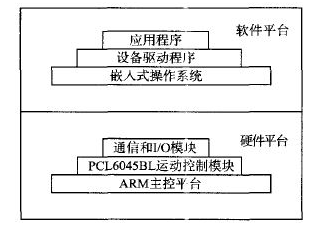
运动控制器是现代工业自动化和机器人技术中的核心组件,负责对机械系统进行精确的控制和调度。运动控制器的控制形式多种多样,每种形式都有其特定的应用场景和优势。以下是对运动控制器控制形式的分析。 一、开环
2024-06-13 09:23:021845 机器视觉控制轴运动原理是一个复杂而深入的主题。下面将从以下几个方面进行介绍: 机器视觉概述 机器视觉是一种模拟人类视觉的计算机技术,通过图像采集、处理和分析来实现对物体的识别、定位、测量和分类等功能
2024-07-04 10:42:161420 焊接机器人多久检修一次? 一、六轴焊接机器人的工作原理 六轴焊接机器人是一种具备六个自由度的自动化设备,可以进行复杂的焊接操作。这些机器人通常由控制系统、驱动系统、执行机构和传感器组成。通过预先编程,六
2024-07-09 16:31:13968 
工业机器人控制器是工业机器人系统的大脑,负责接收指令、处理数据、控制机器人的运动和操作。控制器的设计和性能直接影响到机器人的灵活性、精确度和效率。以下是工业机器人控制器的主要功能,以及对这些功能
2024-09-04 09:18:122507
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论