环境中,应该可以注意到便携设备充电器等的啸叫声。另外,音频设备等听到在播放声音之外的声音就是比较严重的问题了。 首先,讲解一下啸叫的机理。 高介电常数的陶瓷电容器具有给电介质施加电压时,电介质变形(失真)的特性。
2022-04-26 15:51:43 9080
9080 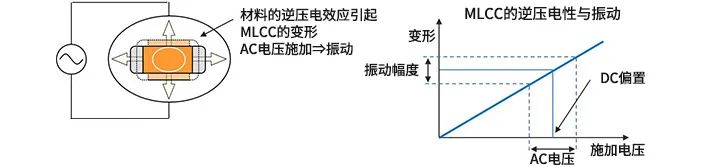
MLCC——多层片式陶瓷电容器,简称贴片电容,会引起噪声啸叫问题……笔记本电脑电源电路的啸叫示例部位随着人们
2018-05-13 11:20:5930064 
原文来自公众号:硬件工程师看海 后台回复:电源 有更多资料 随着笔记本电脑、手机等设备的普及,由电容器振动所产生的“啸叫”问题越来越多的受到人们的关注,如何优化各电源架构的电容啸叫,让电容闭嘴
2021-05-24 15:07:5717677 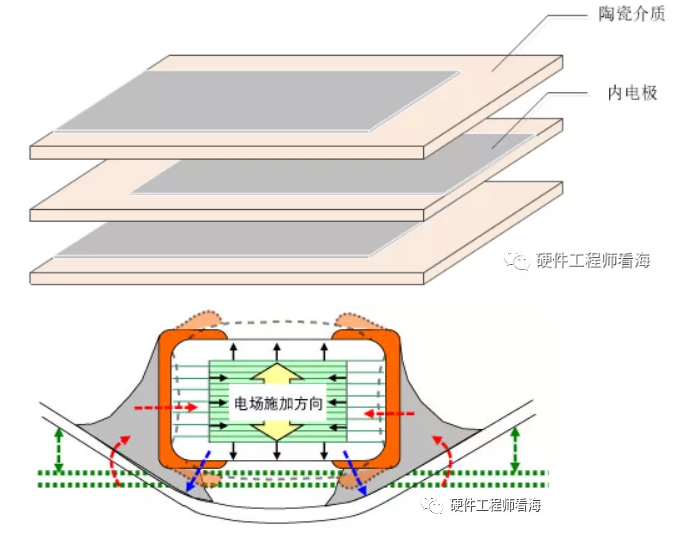
随着笔记本电脑、手机等设备的普及,由电容器振动所产生的“啸叫”问题越来越多的受到人们的关注,如何优化各电源架构的电容啸叫,让电容闭嘴,是一个有趣的问题。
2022-04-20 08:17:1913929 啸叫其实是一种干扰现象,因其频率刚好在人的听觉范围之内而产生的一种较为尖锐的声音。有些电源在轻载场景下,往往会由PWM模式转换为PFM模式,此时电源的开关频率会下降。例如电脑的Vsb(standby
2022-09-05 11:30:1014584 环境中,应该可以注意到便携设备充电器等的啸叫声。另外,音频设备等听到在播放声音之外的声音就是比较严重的问题了。 首先,讲解一下啸叫的机理。 高介电常数的陶瓷电容器具有给电介质施加电压时,电介质变形(失真)的特性。这
2023-05-06 15:23:003559 
在笔记本电脑、平板电脑、智能手机、电视机以及车载电子设备等运行时,有时会听到"叽"的噪音,该现象称为"啸叫"。 导致"啸叫"出现的原因可能在于电容器、电感器等无源元 件。 电容器与电感器
2023-05-24 16:37:2610206 
在笔记本电脑、平板电脑、智能手机、电视机以及车载电子设备等运行时,有时会听到"叽"的噪音。该现象称为"啸叫",导致该现象出现的原因可能在于电容器、电感器等无源元件。电容器与电感器的发生啸叫
2023-08-21 17:08:481706 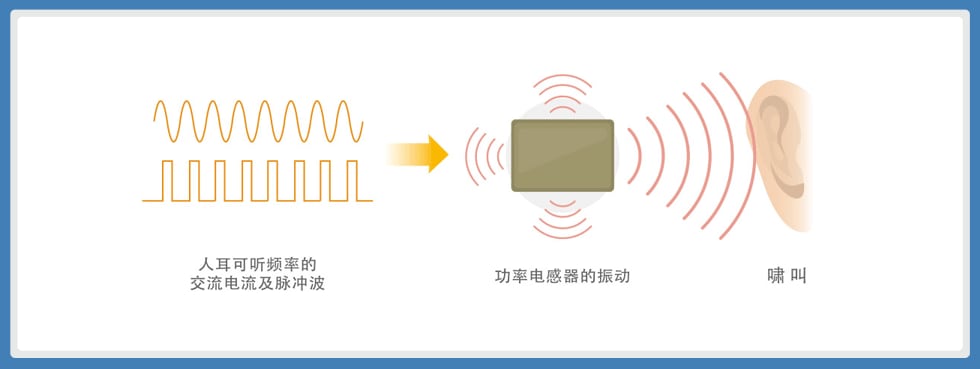
"啸叫"通常指的是一种高频、尖锐、持续的噪音或声音。在技术和电子领域,啸叫常常是指电路中的一种异常声音,类似于哨声或尖锐的嗡嗡声。这种声音通常是由于电路的不稳定性、振荡或其他干扰因素引起的。
2023-12-21 09:30:5327659 
大学生电子设计竞赛 啸叫抑制设计
2014-08-12 17:27:52
也未注意到,或者是不在意的现象,但如果在就寝时的安静环境中,应该可以注意到您列举的便携设备充电器等的啸叫声。另外,音频设备等听到在播放声音之外的声音就是比较严重的问题了。-首先,请讲解一下啸叫的机理
2019-06-14 04:20:41
最近在做一款DC-DC电路设计,采用外部斜坡补偿电路,发现一直产生啸叫,特上论坛请教各位高手,DC-DC电路啸叫的原因都有哪些?
2016-01-28 23:09:10
一、人类可听到的声频范围:20Hz~20KHz,因此DC/DC电路中产生的“啸叫声”的主要原因肯定是产生了20Hz~20KHz的机械振动,达到了人类耳朵可听声音频率的范围。二、DC/DC电路啸叫
2021-11-16 06:09:13
最近调试TAS6424E-Q1做多媒体导航的功放输出功能时,发现个问题,当输出功率达到一定程度后,功放输出端的LC滤波电路中的1UF电容会出现啸叫问题,请帮忙分析下产生原因和改善对策。
具体
2024-09-29 06:53:55
在做DLP4500项目时,采用TPS54020作为LED 驱动, 每次上电,DLP工作在VIDEO模式下,都会有啸叫声,采用DLPLCR4500GUI-4.4.1进行控制, 进入到基它模式(如
2025-02-17 07:50:11
我用的是adau1452,请问如何做防啸叫功能呢?谢谢
2023-11-29 06:17:23
也未注意到,或者是不在意的现象,但如果在就寝时的安静环境中,应该可以注意到您列举的便携设备充电器等的啸叫声。另外,音频设备等听到在播放声音之外的声音就是比较严重的问题了。-首先,请讲解一下啸叫的机理
2018-12-03 14:41:10
大家好,最近小弟做的板子回来了,一共三块其中有一块在上电后会有啸叫声,我也不知道这样表述是否准确,总是就是那种响度不大,但是音调很尖锐的声音,在人多的环境下,不特别注意听也发现不了。我感觉声音是从网
2018-02-07 12:51:49
功率电感器啸叫原因PWM调光等DC-DC转换器间歇工作导致的啸叫频率可变模式DC-DC转换器导致的啸叫负荷导致的啸叫功率电感器的啸叫对策
2021-02-24 08:02:09
在笔记本电脑、平板电脑、智能手机、电视机以及车载电子设备等运行时,有时会听到"叽"的噪音。该现象称为"啸叫",导致该现象出现的原因可能在于电容器、电感器等
2021-11-17 07:58:43
在笔记本电脑、平板电脑、智能手机、电视机以及车载电子设备等运行时,有时会听到"叽"的噪音。该现象称为"啸叫",导致该现象出现的原因可能在于电容器、电感器等
2020-08-10 07:31:45
在调试板子过程中,大家经常遇到贴片陶瓷电容会发出吱吱的啸叫声音,十分刺耳,那么今天我们要讨论的问题有三个:1.陶瓷电容为什么啸叫?2.所有陶瓷电容都会啸叫吗?3.如何解决陶瓷电容啸叫的问题呢
2025-03-14 11:29:34
次谐波产生的高次谐波磁场产生附加的转矩,使得电机产生明显的振动和尖锐的噪音。高次谐波使得电动机的机械寿命、绝缘寿命大大缩短。
变频器输出的谐波是导致电机产生高频啸叫的主要原因,当变频器的功率开关
2023-11-14 06:55:27
日常生活中我们经常会碰到话筒啸叫的问题,啸叫使音响系统的音量开不大(传声增益减小),尖锐刺耳的声音让人难以入耳,即使是一套质量好,价格贵的扩声系统也难逃此问题。一般情况下,分析啸叫的原因都需要结合
2022-06-22 17:23:26
的问题,初步分析为此时为轻载,芯片工作在psm模式,且工作频率在20khz以内,正好能听到电感啸叫,目前不可能用过大的输出电容(32uF依旧会有啸叫),过大和过小的电感都无法适应全范围的应用,希望能加点东西或者改变连接方式来解决,还是请教各路大神解决办法!
2014-07-10 18:52:32
变压器发出的。。
振荡频率处于临界状态,就会发出啸叫声。。。
一般采用PWM控制的不会有这种现象。。
变压器本身原因引起的啸叫。。。
这方面比较复杂,需要具体的电路分析。
考虑测测震荡是否
2023-06-19 06:40:31
开关电源的啸叫原因分析(推荐)
2019-04-29 11:21:26
为什么会产生啸叫呢?电感在电路中工作时,会通过脉动电流,若有20Hz------20KHz这个频段的开关激励电流,电流通过线圈时,线圈匝与匝之间的电流因为同向相互排斥,会导致线圈发生轻微的间距偏移,电流
2020-06-02 11:39:02
手持k歌麦克风为什么不会产生啸叫声?而一般麦克风与音箱之间经常会产生啸叫。
2021-12-15 20:10:49
数字方法实现啸叫抑制
2014-08-13 11:31:10
如图是三款步进电机的参数,1.68A的那款电机没什么问题,另外两款0.4A的电机,使能之后就会啸叫。那两款0.4A的电机的电感比1.68A的大很多,是不是因为这个原因呢?
2017-02-20 17:35:22
采用UC3844的双管正激式拓扑电源,开关变压器产生啸叫的解决方法。
2011-09-17 21:53:48
在测试开关电源电路时,明明看到电路是工作正常,可是有时候电感总是会无故发出讨厌的滋滋声。通常这些电感啸叫很难追踪,不知道如何确定它来自哪里。要知道这些电感啸叫如何产生,我们可以先了解电感的频率特性入手
2019-08-07 07:22:51
啸叫是板子上的器件发出了声音,我们都知道,声音是由物体振动产生的,且人耳能听到的声音频段为20Hz~20kHz。也就是说有啸叫,必然是有20Hz~20kHz的频段,且引起了器件振动。
那么我们便有
2025-11-21 06:11:25
电视等电源电路中,以往不起眼的陶瓷电容器产生的『啸叫(声音)』成为一大设计难题。啸叫的产生原理为什么陶瓷电容器会产生『啸叫(声音)』?一旦交流电场被施加在高介电常数材料的电容器上,电容器变形振动,使
2019-02-28 07:30:00
电容产生啸叫的原因是什么?
2021-06-18 07:17:12
` 本帖最后由 eehome 于 2013-1-5 10:07 编辑
电感啸叫的原因分析 1、电感在DC工作时,电感线圈两端一直存在着1MHZ左右的开关电流。且这个电流的变化会使电感线圈产生振动
2012-08-31 19:02:34
电感啸叫****怎样经过电感选型来防止电感啸叫****怎样经过电感选型来防止上星期有客户遇到了电感啸叫的问题,他问我是什么原因。我看他单板空载,判别是DC-DC进入轻载形式,电感上的电流交变频率在
2022-12-27 16:50:10
有些电子产品为什么后会工作时发出声音?这是因为电感、变压器在工作中,会产生啸叫声。
人耳能听到的声音频率在20HZ-20KHZ左右,如果产生了人耳可以听到的声音,那激励频率基本可以锁定。
声音的本质
2024-05-30 20:56:51
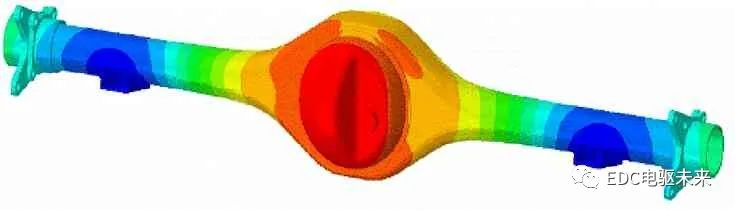
本文基于某纯电动汽车电机啸叫噪声表现,通过整车测试评价及电机本体CAE仿真分析的手段提出结构改进方案,优化后电机啸叫噪声降低明显,对纯电动汽车电机啸叫噪声优化提供了一定的依据及相关经验。
2021-01-27 06:02:00
啸叫其实是一种干扰现象,因其频率刚好在人的听觉范围之内而产生的一种较为尖锐的声音。有些电源在轻载场景下,往往会由PWM模式转换为PFM模式,此时电源的开关频率会下降。例如电脑的Vsb(standby
2023-09-20 07:13:50
步进电机为什么会啸叫?
2024-05-08 08:13:29
扩大机用防止啸叫电路
2008-05-01 01:05:592868 
电子专业单片机相关知识学习教材资料——电感啸叫的成因与解决方法
2016-10-10 14:17:59 0
0 在前级效果器或功放机内加装一块防啸叫处理模块,试过效果挺好的!
2016-11-23 15:45:1943 MLCC多层片式陶瓷电容器,简称贴片电容,会引起噪声啸叫问题。 笔记本电脑电源电路的啸叫示例部位 随着人们对电子设备的需求趋于平静,在笔记本电脑、手机、数码相机 (DSC) 等各种应用设备的电源电路
2018-08-23 09:31:346309 环形电感或工形电感啸叫问题,在稳压电源电路的设计经常遇到,根据稳压电源芯片的不同和外围电路的不同,解决方法也各不相同,本文档的宗旨是分析电感啸叫的根本原因,并综合各种不同的解决方法,供学习参考和借鉴。
2018-11-19 15:42:3631171 
啸叫其实是一种干扰现象,因其频率刚好在人的听觉范围之内而产生的一种较为尖锐的声音。有些电源在轻载场景下,往往会由 PWM 模式转换为 PFM 模式,此时电源的开关频率会下降。例如电脑的 Vsb
2021-01-13 18:44:0013 在笔记本电脑、平板电脑、智能手机、电视机以及车载电子设备等运行时,有时会听到“叽”的噪音,该现象称为“啸叫”。导致“啸叫”出现的原因可能在于电容器、电感器等无源元件。电容器与电感器的发生啸叫
2020-12-11 23:36:0023 本文基于某纯电动汽车电机啸叫噪声表现,通过整车测试评价及电机本体CAE仿真分析的手段提出结构改进方案,优化后电机啸叫噪声降低明显,对纯电动汽车电机啸叫噪声优化提供了一定的依据及相关经验。
1、电机
2022-02-11 10:47:005685 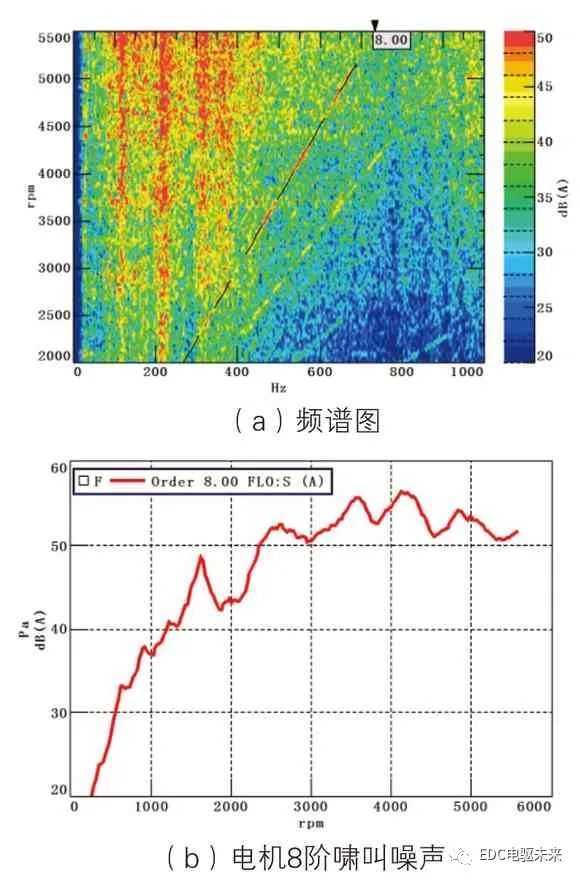
本文基于某纯电动汽车电机啸叫噪声表现,通过整车测试评价及电机本体CAE仿真分析的手段提出结构改进方案,优化后电机啸叫噪声降低明显,对纯电动汽车电机啸叫噪声优化提供了一定的依据及相关经验。
1、电机8
2021-01-22 10:23:4021 的原理不同,尤其是电感器的啸叫,其原因多种多样,十分复杂。 分享本文,分析DC-DC转换器等电源电路的主要元件——功率电感器的啸叫原因以及有效对策。 功率电感器啸叫原因 一、间歇工作、频率可变模式、负荷变动等可能导致人耳可听频率振
2021-03-02 10:17:265719 音响系统啸叫一旦发生,轻者会造成传声器通路音量无法调大,调大后啸叫非常严重,对现场演出会造成恶劣影响,当达到啸叫临界点时,传声器声音开大后会出现声音振铃现象声音存在混响感,破坏音质;重者导致音箱或功率放大器由于信号过强而烧毁。
2021-03-21 11:04:2236832 导致开关电源啸叫的六种情况及解决方法(深圳市中远通电源技术开发有限公司怎么样)-导致开关电源啸叫的六种情况及解决方法
2021-09-24 17:14:0161 一、人类可听到的声频范围:20Hz~20KHz,因此DC/DC电路中产生的“啸叫声”的主要原因肯定是产生了20Hz~20KHz的机械振动,达到了人类耳朵可听声音频率的范围。二、DC/DC电路啸叫
2021-11-09 16:21:0311 在笔记本电脑、平板电脑、智能手机、电视机以及车载电子设备等运行时,有时会听到"叽"的噪音。该现象称为"啸叫",导致该现象出现的原因可能在于电容器、电感器等无源元件。电容器与电感器的发生啸叫
2021-11-10 13:20:5945 一、DC/DC电路电感为什么产生啸叫
稳压电源电路输出的开关电流的频率,或周期性脉冲群的周期频率,或毛刺的周期频率落入20~20kHz的音频范围,且周期性变化的电流经过电感线圈而产生交变磁场,使得
2022-02-10 10:20:1837 环形电感或工形电感啸叫问题,在稳压电源电路的设计经常遇到,根据稳压电源芯片的不同和外围电路的不同,解决方法也各不相同,本文档的宗旨是分析电感啸叫的根本原因,并综合各种不同的解决方法,供学习参考和借鉴
2022-02-11 11:05:0318 MLCC——多层片式陶瓷电容器,简称贴片电容,会引起噪声啸叫问题。
笔记本电脑电源电路的啸叫示例部位
随着人们对电子设备的需求趋于平静,在笔记本电脑、手机、数码相机 (DSC) 等各种应用设备
2022-02-11 15:04:2611 远程会议、线上开户、购买保险……越来越多的场景通过视频展开。在我们享受便利的同时,视频过程中也偶有「不和谐的声音」出现,让我们捂耳朵、关音响、闭麦狼狈三连,可谓是「啸叫」一响,讲了白讲。 不过不用
2022-02-25 16:52:0610571 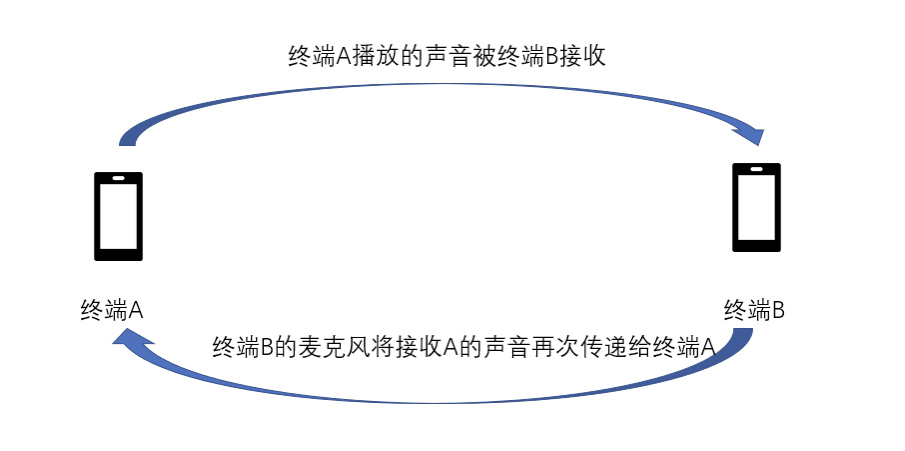
啸叫是指听到来自PCB板的类似“叽”或“吱”声音的现象。例如,听说有的便携设备用的廉价充电器发出相当大的啸叫音。
2022-05-07 11:42:113317 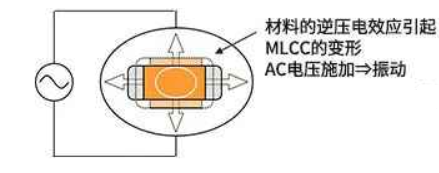
随着笔记本电脑、手机等设备的普及,由电容器振动所产生的“啸叫”问题越来越多的受到人们的关注,如何优化各电源架构的电容啸叫,让电容闭嘴,是一个有趣的问题。
2022-08-01 11:17:214268 环境中,应该可以注意到便携设备充电器等的啸叫声。另外,音频设备等听到在播放声音之外的声音就是比较严重的问题了。 首先,讲解一下啸叫的机理。 高介电常数的陶瓷电容器具有给电介质施加电压时,电介质变形(失真)的特性。
2022-08-22 10:08:021600 啸叫是指听到来自PCB板的类似“叽”或“吱”声音的现象。例如,听说有的便携设备用的廉价充电器发出相当大的啸叫音。
2022-08-22 10:08:031494 大电流功率电感的应用领域十分广泛,电感类型比较多,本篇暂不讨论大电流功率电感的类型问题,而是说一个热门问题——大电流功率电感啸叫的解决方法。 大电流功率电感啸叫是很常见的情况,只要找到引起电感啸叫
2022-09-22 08:41:073742 
大电流功率电感的应用领域十分广泛,电感类型比较多,本篇暂不讨论大电流功率电感的类型问题,而是说一个热门问题——大电流功率电感啸叫的解决方法。 大电流功率电感啸叫是很常见的情况,只要找到引起电感啸叫
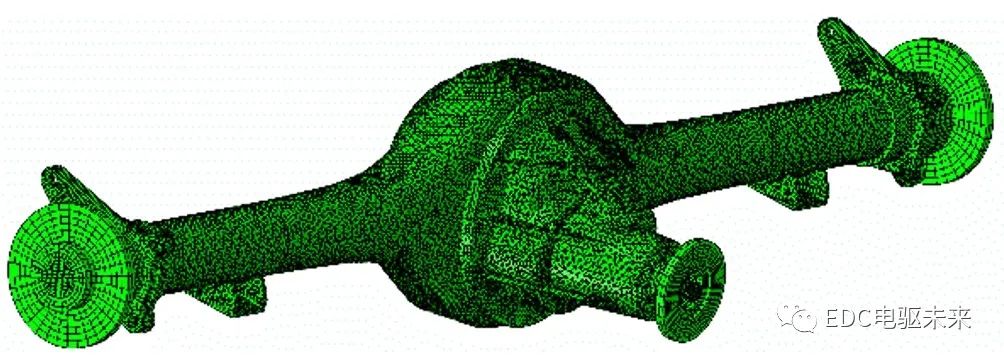
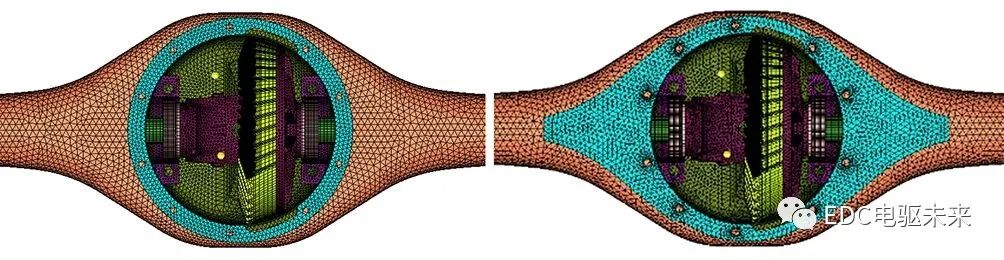
2022-10-07 08:37:50656 电驱动后桥布置在后排地板下方,电机输出轴通过花键与减速器一轴连接,经过两级齿轮减速后,通过后桥驱动后轮传递动力。减速器为偏置式结构,一轴与电机转子轴同轴,二轴、差速器轴与转子轴平行。其相关参数如表1 所示,结构简图如图1所示。
2023-01-29 09:58:082143 -接下来请讲解一下另一个关于安装的课题“啸叫”。啸叫是指听到来自PCB板的类似“叽”或“吱”声音的现象。例如,听说有的便携设备用的廉价充电器发出相当大的啸叫音。
2023-02-17 09:25:083161 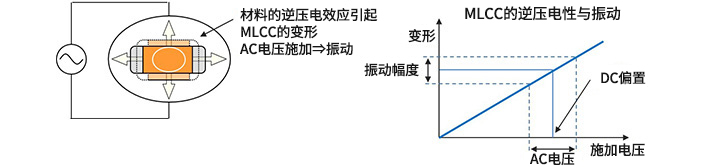
较高、控制难度较大。本次研究的轻客所搭载的电驱动后桥属于电机驱动桥集中式驱动模式,其成本较低,具有较高的传动效率,且便于维修。
2023-03-07 11:18:172346 随着人们对电子设备的需求趋于平静,在笔记本电脑、手机、数码相机 (DSC) 等各种应用设备的电源电路方面,以前未引起重视的由电容器振动所产生的“啸叫”问题已成为设计方面的课题。
2023-04-23 10:00:062745 
电感啸叫就是指在20Hz-200Hz的电流激励频率下,电感会发出人耳能听见的吱吱声。 电感啸叫的原因之一是电感不固定形成空腔噪声。 接下来,详细为你说下电感啸叫的原因和解决办法。
2023-05-31 09:15:2419528 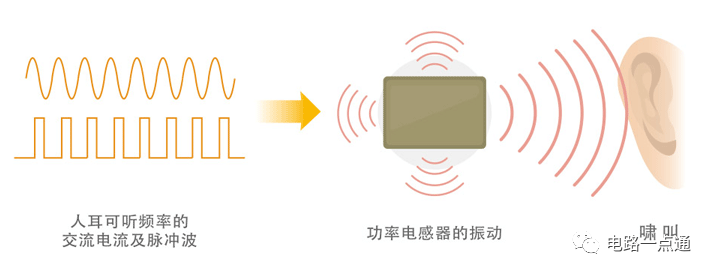
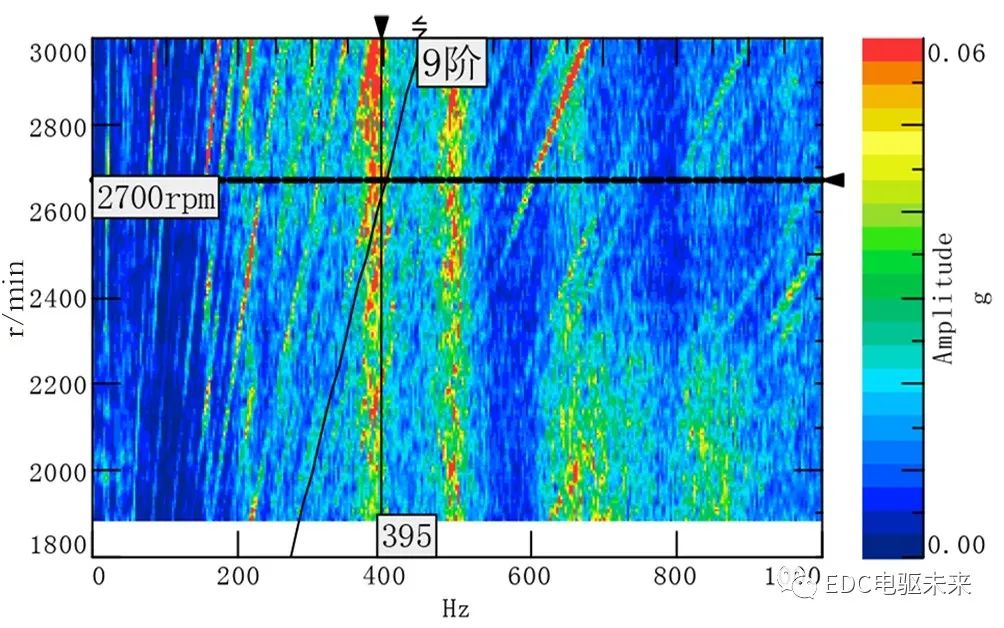
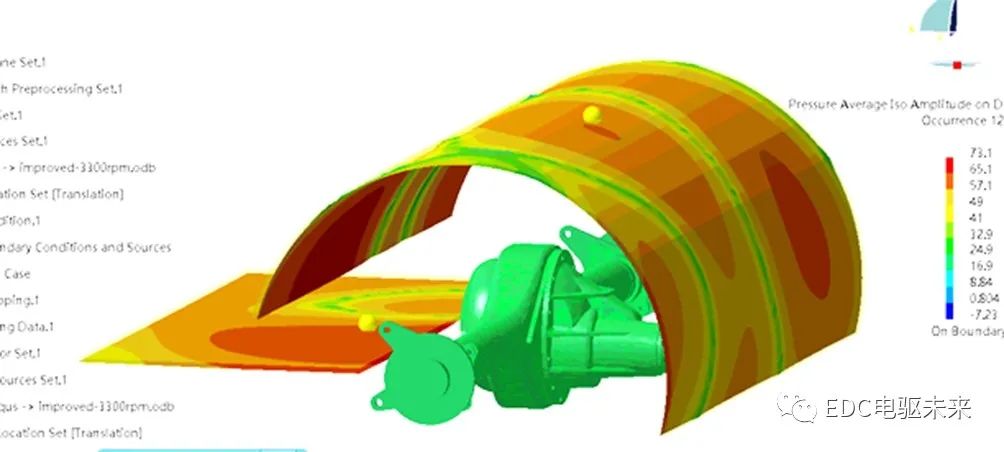
纯电动汽车在整车NVH性能开发过程中,驱动电机存在8阶啸叫噪声,严重影响整车NVH性能品质。通过整车试验、主观评价及CAE仿真分析手段,验证出空气传播为车内8阶啸叫噪声大的主要路径,锁定驱动电机逆变器壳体共振及电机悬置支架振动是造成8阶啸叫噪声大的关键因素。
2023-06-19 11:40:225244 
啸叫是指听到来自PCB板的类似“叽”或“吱”声音的现象。例如,听说有的便携设备用的廉价充电器发出相当大的啸叫音。
2023-06-20 09:19:361155 
有关MLCC电容的啸叫发生的原因以及解决方案
2023-07-18 10:06:265522 
的应用。但是在使用过程中,有时会出现开关电源发出啸叫的问题,这不仅影响到设备的正常工作,还会引起设备损坏。因此,为了解决开关电源发出啸叫的问题,需要对其进行详细的分析和解决方案。 一、啸叫的原因 1.磁性元件的振荡 开关电源
2023-08-29 10:32:263205 开关电源轻载啸叫解决 开关电源是一种能将交流电转换为直流电的高频电力设备。在电力电子技术的发展和应用中,其被广泛应用于各种电子设备中,如计算机、通信设备、工业控制和家用电器等。然而,开关电源在工作
2023-08-29 10:32:306618 前段时间焊接了一块电源板,上电之后电容出现了啸叫现象,导致输出电压不正常,检查之后发现是因为电源的输出纹波过大导致的。因此,本文就简单介绍一下电源纹波与电容啸叫。
2023-09-25 14:22:342030 
谷景教你怎么解决贴片高频电感啸叫问题 编辑:谷景电子 贴片高频电感作为电子产品电路中特别重要的一类电子元器件,它对整个电路的影响是特别大的。贴片高频电感出现故障,会引起电路运行不稳定,从而引发一系列
2023-10-11 17:16:581747 电子发烧友网站提供《电感啸叫的常见原因以及解决方法.docx》资料免费下载
2023-10-15 11:03:152 电感啸叫的原因及解决方法剖析 电感是一种特殊的电子元器件,它具有电抗性质和储能特性,被广泛用于电力、通信、电子等领域。然而,在使用电感的过程中,可能会出现电感啸叫的现象,如果不及时解决,这种问题会
2023-10-23 10:19:169083 功率电感为什么会啸叫?有效对策有哪些? 随着技术的不断发展,功率电感的应用越来越广泛。它们主要用于电源、逆变器、变频器等电路中,用于储存和传输能量。然而,有时我们会发现功率电感会出现啸叫的情况,这不
2023-10-31 14:43:412278 【干货分享】MLCC电容啸叫的4个对策
2023-12-06 17:26:001431 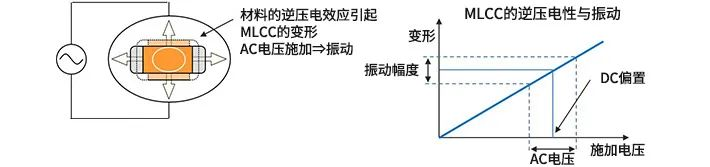
MLCC为什么会啸叫?所有MLCC都会啸叫吗?哪些场合MLCC啸叫明显?怎么解决啸叫? MLCC(多层陶瓷电容器)在特定情况下会发出啸叫声,这是因为电容器内部的压电效应引起的。然而,并非所有
2023-11-30 15:44:572372 在现代电子设备中,开关电源以其小型化、高效率的特点被广泛应用。然而,其工作时产生的高频噪声时常困扰使用者,这种刺耳的啸叫声不仅影响舒适性,也可能成为设备故障的前兆。本文将深入剖析开关电源产生啸叫
2024-02-01 15:26:483996 简单介绍一下电源纹波与电容啸叫 电源纹波与电容啸叫是在电源系统中常见的两种问题,它们会影响电子设备的性能和稳定性。本篇文章将详细介绍电源纹波和电容啸叫的定义、原因、对设备的影响以及常见的解决方法
2024-02-04 09:42:472073 在笔记本电脑、平板电脑、智能手机、电视机以及车载电子设备等运行时,有时会听到"叽"的噪音。该现象称为"啸叫",导致该现象出现的原因可能在于电容器、电感器等无源元件。电容器与电感器的发生啸叫
2024-03-28 17:36:191816 
▼关注公众号:工程师看海▼ 原文来自原创书籍《硬件设计指南 从器件认知到手机基带设计》: 随着笔记本电脑、手机等设备的普及,由电容器振动所产生的“啸叫”问题越来越多的受到人们的关注,如何优化各电源
2024-02-20 08:45:223528 
一体成型电感作为近年来应用比较热门的一种的电感产品,很多人在使用的过程中有遇到过一体成型电感啸叫的情况。那么,如何有效解决一体成型电感啸叫的问题呢?本篇我们就来简单探讨一下。 一体成型电感啸叫通常是
2024-07-02 09:57:01862 一体成型电感作为近年来应用比较热门的一种的电感产品,很多人在使用的过程中有遇到过一体成型电感啸叫的情况。那么,如何有效解决一体成型电感啸叫的问题呢?本篇我们就来简单探讨一下。一体成型电感啸叫通常是
2024-08-18 20:19:391 电子发烧友网站提供《电感啸叫对电路稳定性有影响吗.docx》资料免费下载
2024-09-04 11:48:130 电子发烧友网站提供《贴片屏蔽功率电感啸叫可以不管吗.docx》资料免费下载
2024-09-02 14:51:030 谷景科普电感啸叫对电路稳定性有影响吗编辑:谷景电子电感啸叫是一种非常常见的设备运行问题,啸叫通常是由于电感在快速变化的电流作用下,其内部的磁芯产生振动,从而发出声音的,也就是我们所说的啸叫!很多人
2024-09-16 22:59:550
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论