 电子发烧友App
电子发烧友App


无论是软件定义汽车,还是分布式ECU抑或是自适应Autosar,都离不开智能汽车时代的基础技术车载以太网,对于硬件工程师来说,车载以太网物理层和交换机是其最关注的芯片,这也是利润率远超过高算力芯片的领域,也是基本上被欧美企业垄断的领域。
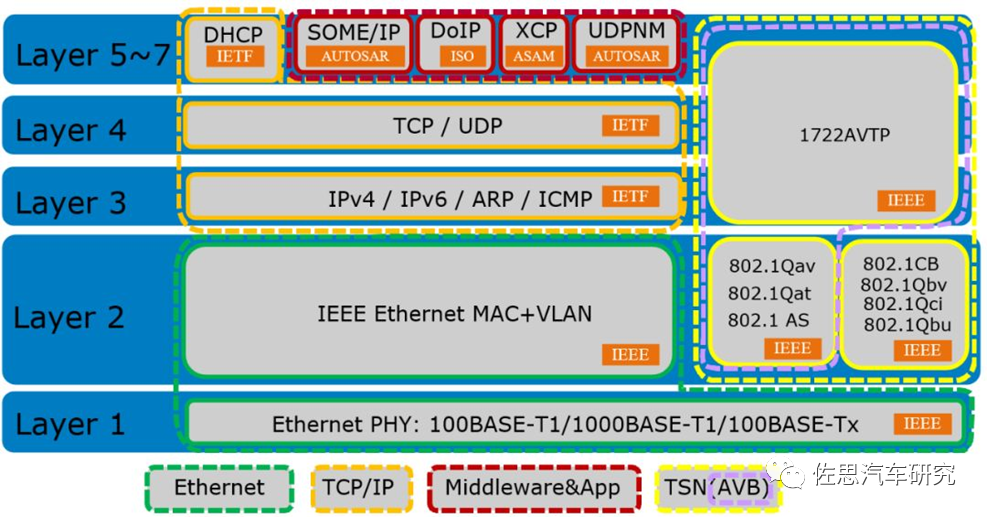
上图是整个车载以太网的7层OSI模型与标准分布图,我们最常提到的是TSN或EAVB,而物理层标准鲜少有人提及。因为绝大多数工程师都不会和物理层打交道。
很多人都在说域控制器、服务导向架构、分布式计算或软件定义汽车,殊不知关键的1G车载以太网物理层芯片在2020年才SOP,而多G带宽的车载以太网物理层标准才刚刚在去年完成,SOP还得一年或两三年左右。没有这个芯片,什么域控制器、服务导向架构、分布式计算或软件定义汽车都是空中楼阁。
全面使用域控制器、服务导向架构、分布式计算或软件定义汽车都需要以太网做骨干网,也就是多G以太网,而第一个支持多G车载以太网物理层的芯片在2020年11月才正式推出,量产估计要到2021年底或2022年初,也有可能到2022年底才量产。使用单一域控制器,也离不开1G车载以太网物理层芯片,而1G车载以太网物理层芯片量产是在2019年。
首先一个问题,为什么要独立制定一个车载以太网物理层标准?沿用传统以太网物理层不更好么?
传统以太网与车载以太网最大不同是传统以太网需要2-4对线,车载以太网只需一对,且是非屏蔽的,仅此一项,可以减少70-80%的连接器成本,可以减少30%的重量。这是车载以太网诞生的最主要原因。同时也是为了满足车内的EMC电磁干扰。
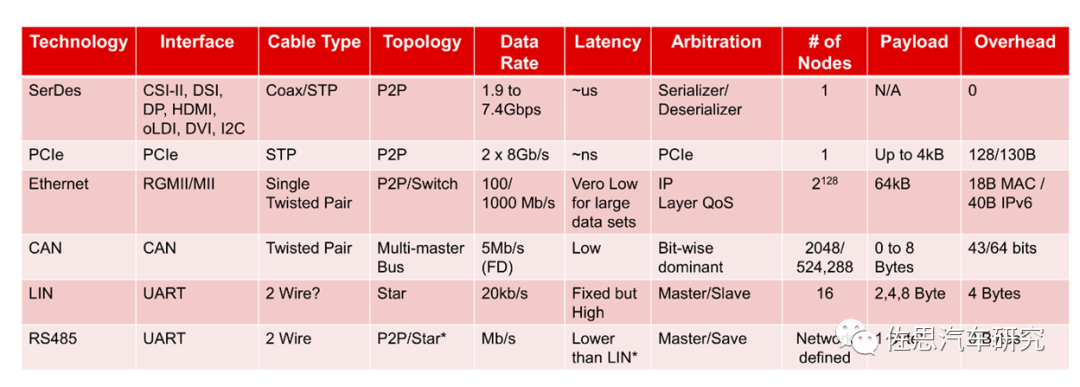
常见汽车传输界面特性一览表。
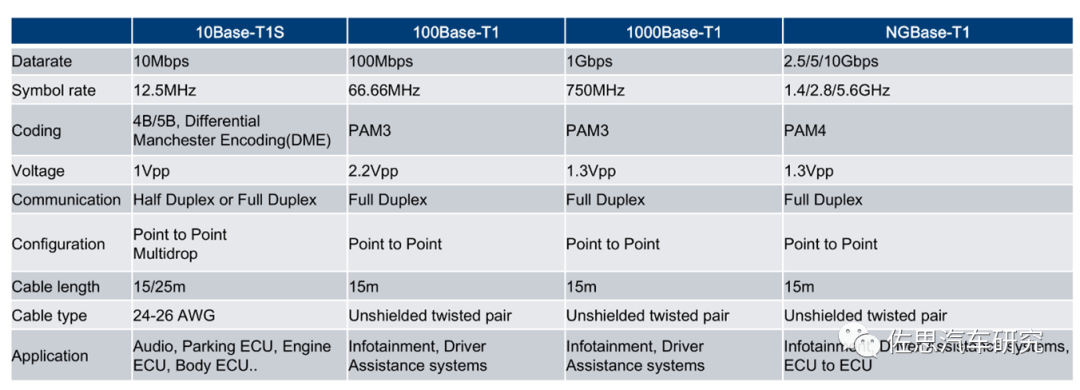
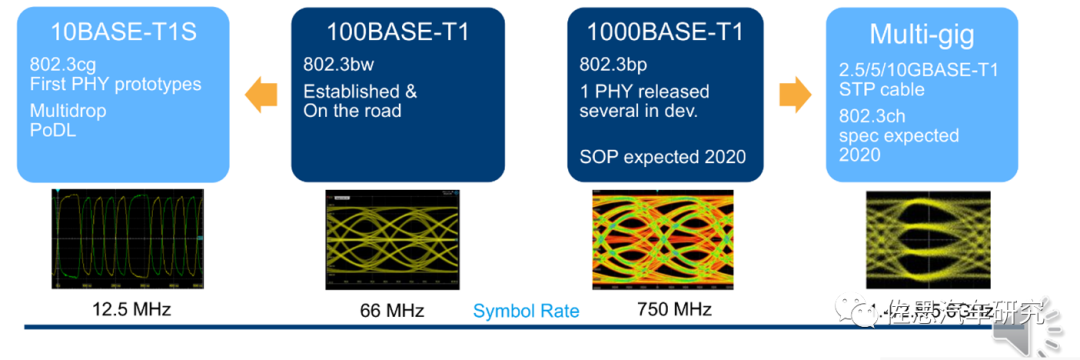
四个车载以太网物理层标准,车载以太网野心勃勃,10Base-T1S是试图取代传统的CAN网络的。第一个1000Base-T1标准的物理层芯片是Marvell的88Q2112,虽然其推出时间是2015年10月,但在2019年才量产,典型应用如英伟达的旗舰盒子Pegasus。
特斯拉最新的HW3.0使用Marvell的88EA1512,是20年前的传统以太网物理层标准。2020年10月,Marvell推出第三代产品,实际上88Q2112有两代,第一代没有量产,只是占个第一的位置。所以Marvell第三代型号是88Q222xM。
第三代特别增加对Open Alliance TC10,用于睡眠模式和唤醒。能够满足最严苛的ASIL-D级标准,在AEC-Q100温度上达到1级标准,也就是最高可承受125°高温,通常物理层芯片都是2级标准,即105°高温。除了Marvell,还有德州仪器、博通能提供1000Base-T1标准的物理层芯片。台湾Realtek有支持1000Base-T1标准物理层的交换机芯片。
博通在NGBase-T1的物理层芯片领域拔得头筹,2020年11月,博通宣布推出BCM8989X 和BCM8957X,BCM8989X是业内第一个对应NGBase-T1(即IEEE 802.3ch)标准的MACsec 物理层芯片,到目前为止,博通是唯一能提供NGBase-T1芯片的厂家。BCM8957X则是业内第一个支持10Mbps 到10Gbps速率的L2/L3级车载以太网交换机芯片。特斯拉与博通在下一代FSD芯片上有合作,但不大可能将多G物理层嵌入FSD中,因为物理层芯片一般都是独立的。还有一个IEEE 802.3cy,也就是10G以上车载以太网物理层标准,分别支持25、50、100G。
IEEE的车载以太网物理层基本上是全部照搬OPEN Alliance的标准,OPEN Alliance是非盈利性的汽车行业和技术联盟,旨在鼓励大规模使用以太网作为车联网标准。OPEN Alliance成员单位利用以太网的可扩展性和灵活性实现车联网低成本通信,减少通讯复杂性。以太网通信网络也是实现未来自动驾驶和智能网联汽车功能的重要组成部分。自建立以来,OPEN Alliance的成员单位已增至近400家。
10BASE-T1S即IEEE 802.3cg也就是 OPEN Alliance 的TC14 ,100BASE-T1即IEEE802.3bw也就是OPEN Alliance TC1,100/1000BASE-T1 ECU测试标准即OPEN Alliance的TC8, 1000BASE-T1即IEEE802.3bp也就是OPEN Alliance 的TC12,2.5/5/10GBASE-T1即IEEE802.3ch也就是OPEN Alliance 的TC15标准。
OPEN Alliance有18家发起(Promote)会员单位,2011年11月,宝马、博通和NXP成立OPEN Alliance,后来还有Marvell(原是Adopter会员,后提升)、通用、丰田、沃尔沃、大众、捷豹路虎(曾经是,目前退出)、现代、博世、瑞萨、大众、雷诺(曾经是,目前退出)、大陆汽车、奔驰(曾经是,目前退出)、三星哈曼(曾经是,目前退出)、现代、中国台湾瑞昱(曾经是,目前退出)。Promoter会员单位只能有原始的三家邀请才能成为Promoter会员单位。
另外每年交1500美元就能成为的Adopter会员,其中包括20家中国企业(可能有遗漏),这20家中国企业是:北汽、北京汽车研究总院、北汽福田、华晨汽车、一汽集团、航盛电子、台湾HTC、惠州华阳、豪恩、恒润科技、东软、宁波卡倍亿、泛亚汽车、台湾和硕、沈阳东信创智、深圳鹏毅实业、台湾凌阳创新、台湾凌阳科技、信利光电、信利半导体。虽然IEEE制定了标准,但车载以太网ECU测试标准是OPEN Alliance制定的。这里面涵盖了行业的全部有影响力的企业。
物理层标准再分为三层,即PCS、PMA和PMD。
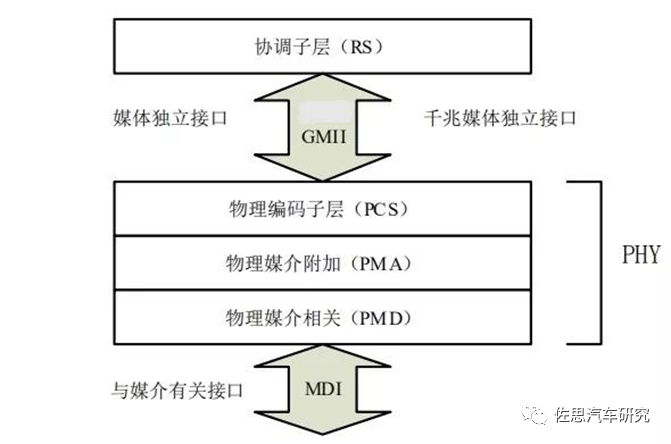
PMA比较关键,变化也比较多。PCS子层负责3B2T(千兆车载以太网)编码,它可以把从GMII口接收到的8位并行的数据转换成10位并行的数据输出。因为10比特的数据能有效地减小直流分量,降低误码率,另外采用3B2T编码便于在数据中提取时钟和进行首发同步。可以把PCS两头看成GMII接口和TBI接口。PMA子层进一步将PCS子层的编码结果向各种物理媒体传送,主要是负责完成串并转换。
PCS层以125M的速率并行传送10位代码到PMA层,由PMA层转换为1.25Gbps的串行数据流进行发送,以便实际能得到1Gbps的千兆以太网传送速率。可以把PMA子层的两头分别看做TBI接口和SGMII接口。PMD子层将对各种实际的物理媒体完成接口,完成真正的物理连接。
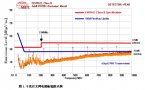
因为是非屏蔽单对线,担心有RF泄露,因此美国FCC会对此类产品做检验。车载以太网的测试是大麻烦,直到2021年2月,泰科才第一个推出满足IEEE 802.3ch MultiGBASE-T1规范的车载以太网测试系统。
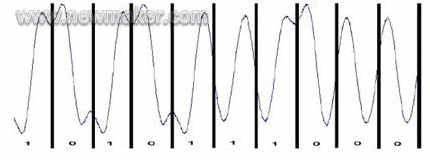
全双工通信及 PAM3 信令为在真实世界条件下验证 ECU 增加了复杂度。大多数串行标准都在单工模式下工作,一次只有一台设备通信,有些通信标准对发送和接收使用一条单独的链路,而在汽车以太网中,主设备和从设备可以通过同一条链路同时通信。
因此,来自主设备的信号与来自从设备的信号相互叠加。主设备知道它发送的是哪些数据,它可以从叠加的信号中确定从设备的信号,反之亦然。尽管收发机是为处理这种情况而设计的,但在示波器上隔离信号,进行信号完整性测试或协议解码几乎是不可能的。
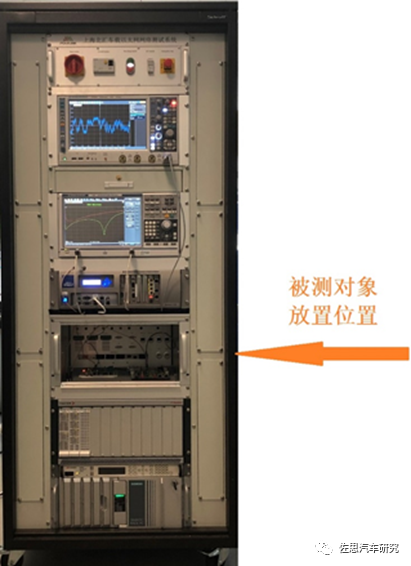
测试需要昂贵的硬件和软件,还要有足够强的学习能力,几乎没有人熟悉这个领域。这个在开发后期需要频繁测试调整,租一套设备测试几乎是不可能的。硬件昂贵,像高带宽的示波器是很昂贵的,13G的示波器,大概200万人民币左右,硬件工程师得人手一个,可不是只买一个就行得,110G的示波器价格是百万美元。频谱仪,射频信号源,网络分析仪这些一旦上G带宽,都是数百万元价格。
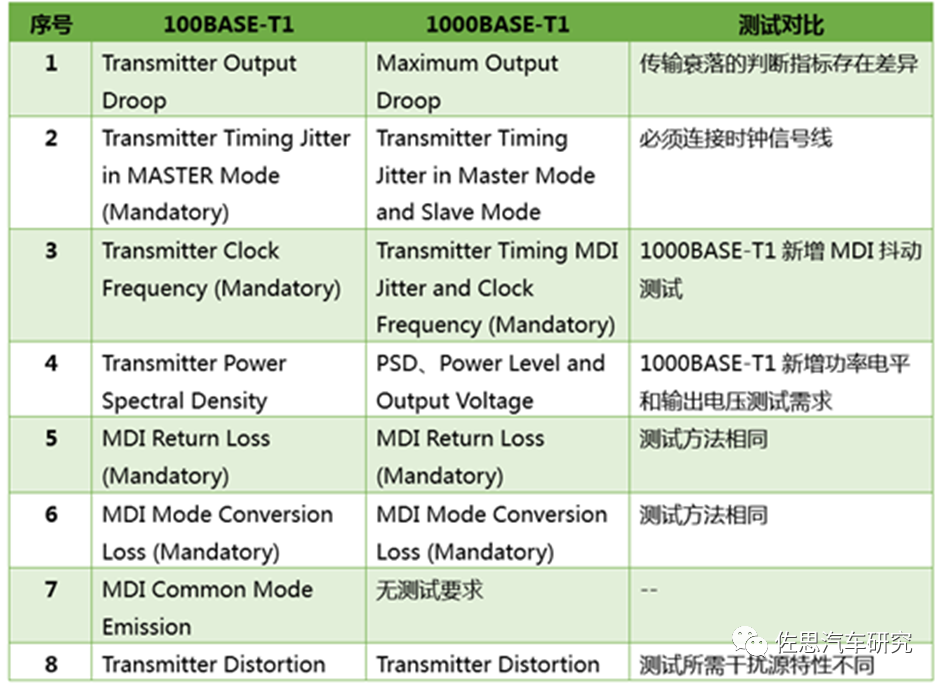
主要测试内容如上表。物理层芯片是一个技术门槛非常高的领域,全球只有NXP、博通、Marvell、瑞昱、Microchip、德州仪器六家能够完成,因为物理层芯片是模拟领域。物理层芯片在发送数据的时候,收到MAC过来的数据(对物理层芯片来说,没有帧的概念,对它来说,都是数据而不管什么地址,数据还是CRC),每4bit就增加1bit的检错码,然后把并行数据转化为串行流数据,再按照物理层的编码规则(10Based-T的NRZ编码或100based-T的曼彻斯特编码)把数据编码,再变为模拟信号把数据送出去。
网线上的到底是模拟信号还是数字信号呢?答案是模拟信号,因为它传出和接收是采用的模拟的技术。虽然它传送的信息是数字的,并不是传送的信号是数字的。
众所周知,模拟IC处理的信号都具有连续性,可以转换为正弦波研究,而数字IC处理的是非连续性信号,都是脉冲方波。模拟电路比较注重经验,设计门槛高,学习周期10-15年;数字电路则有EDA工具辅助,学习周期2-3年。模拟IC强调的是高信噪比、低失真、低耗电、高可靠性和稳定性。产品一旦达到设计目标就具备长久的生命力,生命周期长达30年以上的模拟IC产品也不在少数。如运算放大器NE5532,生命周期超过50年,现在还在用。
数字IC多采用低压CMOS工艺,而模拟IC少采用CMOS工艺。因为模拟IC通常要输出高电压或者大电流来驱动其他元件,而CMOS工艺的驱动能力很差。此外,模拟IC最关键的是低失真和高信噪比,这两者都是在高电压下比较容易做到的。而CMOS工艺主要用在5V以下的低电压环境,并且持续朝低电压方向发展。
对于数字电路来说是没有噪音和失真的,数字电路设计者完全不用考虑这些因素。此外由于工艺技术的限制,模拟电路设计时应尽量少用或不用电阻和电容,特别是高阻值电阻和大容量电容,只有这样才能提高集成度和降低成本。某些射频IC在电路板的布局也必须考虑在内,而这些是数字IC设计所不用考虑的。因此模拟IC的设计者必须熟悉几乎所有的电子元器件特性,非15年以上经验不可。
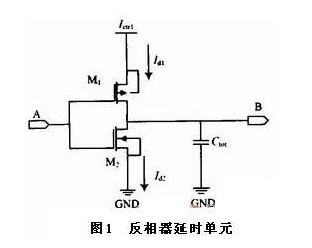
另一个门槛是CDR,即时钟数据恢复,对于高速的串行总线来说,一般情况下都是通过数据编码把时钟信息嵌入到传输的数据流里,然后在接收端通过时钟恢复把时钟信息提取出来,并用这个恢复出来的时钟对数据进行采样,因此时钟恢复电路对于高速串行信号的传输和接收至关重要。
对于高速的串行总线来说,一般情况下都是通过数据编码把时钟信息嵌入到传输的数据流里,然后在接收端通过时钟恢复把时钟信息提取出来,并用这个恢复出来的时钟对数据进行采样,因此时钟恢复电路对于高速串行信号的传输和接收至关重要。
CDR接口的主要设计挑战是抖动,即实际数据传送位置相对于所期望位置的偏移。总抖动(TJ)由确定性抖动(DJ)和随机抖动(RJ)组成。大多数抖动是确定的,其分量包括码间干扰、串扰、占空失真和周期抖动(例如来自开关电源的干扰)。而随机抖动是半导体发热问题的副产品,无法科学预测,只能凭经验猜测。传送参考时钟、传送PLL、串化器和高速输出缓冲器都对会传送抖动造成影响。
一般来说对低频的抖动容忍度很高,PLL电路能够很好地跟踪,恢复出来的时钟和被测信号一起抖动。高频比较麻烦,要设置PLL电路过滤掉,如何设置,没有电脑辅助,全靠经验,没有15年左右的经验是做不好的。
审核编辑:刘清



























 工商网监
工商网监
评论