 电子发烧友App
电子发烧友App


前言
我国汽车保有量正保持逐年递加的趋势,汽车行业内的竞争压力正在逐渐增大,消费者对汽车的选择也不仅仅局限于空间、动力和油耗等传统汽车的性能,汽车的智能化程度成为吸引消费者的重要因素。
如今,随着汽车电动化、智能化、网联化、共享化的发展,汽车电子设备的数量正处于指数级增长的态势。汽车电子电气架构的设计优化可以使汽车成本降低、性能提升、效率提高。
本文将简要介绍汽车电子电气架构的演变和发展,总结近年来主流汽车电子电气架构在智能汽车中的应用,为汽车产业和学术界在智能化、电动化、网联化、共享化的四化发展中构建汽车电子电气架构提供参考。
1 汽车电子电气架构基础
1.1 汽车电子电气架构概述
汽车电子电气架构为车辆底层框架打下坚实基础。如今的汽车底盘架构不仅仅是机械架构,为实现辅助驾驶功能和其它智能化功能整车上需要安装大量的感应器、传感器以及控制器,还需要大量线束将它们连接起来。汽车电子电气架构的重要性就显现出来了,汽车电子电气架构将汽车上的各类传感器、感应器、控制器和线束硬件和汽车上的软件有机结合起来,使车辆的架构达到简化的同时,还能够提高运行效率。汽车电子电气架构会随着汽车功能的增多而随之演变。
汽车电子电气架构的开发包括需求定义、逻辑功能架构设计、软件/服务架构设计、硬件架构设计、线束设计不同层面的开发。这些开发组成了汽车电子电气架构开发的完整流程,需要多个部门的配合才能完成。通过这一完整开发流程,汽车整体的效率地得到了提升,布线的减少降低了造车的成本,车辆功能增多的同时保证了整车电子系统运行的稳定性。
1.2 汽车电子电气架构发展
1.2.1 电子电气架构演变
汽车刚刚问世的时候,汽车上面的电子元器件数量不多,还没有汽车电子电气架构这一概念。直到上世纪五十年代,汽车开始初步形成简易的电子电气架构。经过四五十年的发展,汽车上各种音频、视频以及其他一些电子元器件先后出现,汽车电子电气架构开始初具规模。直到2000年发布了新的架构标准、通信协议以及相关法律法规,汽车电子电气架构的发展上了新台阶。
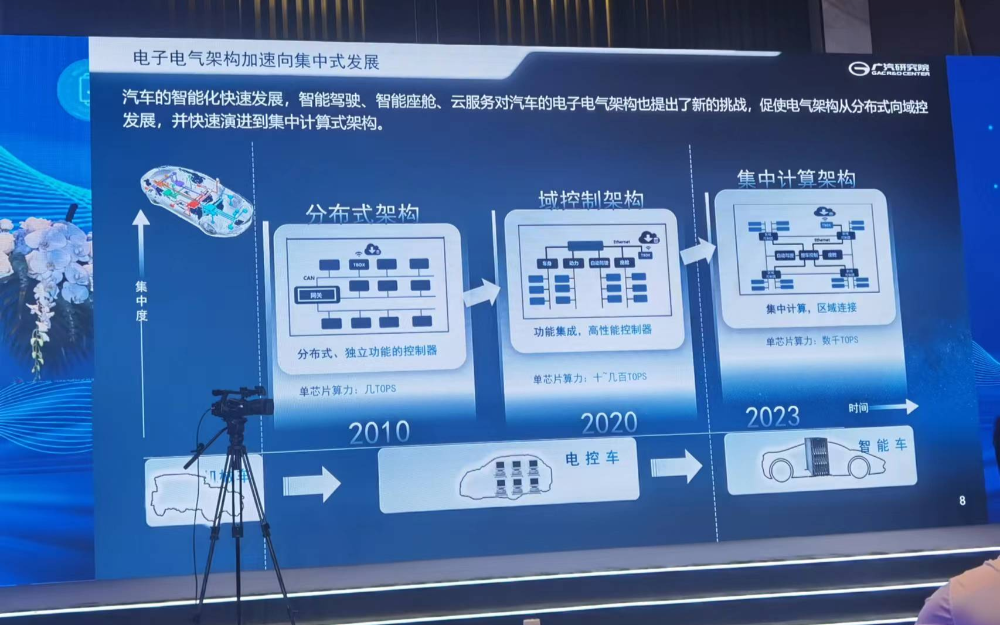
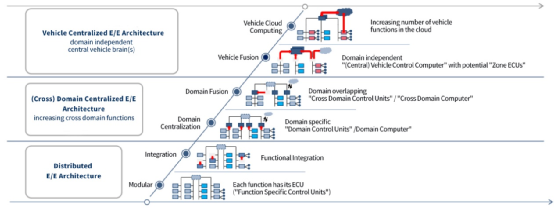
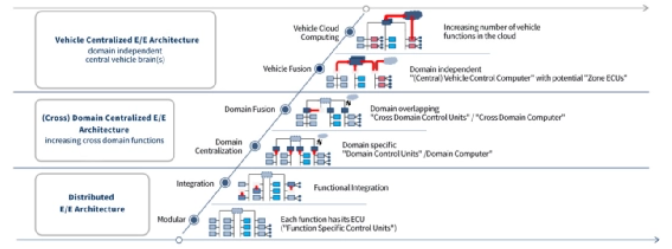
博世的电子电气架构发展如图1所示,清晰的展示了汽车电子电气架构的发展历程。从1970年左右的分布式电子电气架构发展至今,集成化融合化发展已成为趋势。传统分布式架构是每个需求功能都需要一个ECU,随着人们需求的增多,汽车上ECU的数量达到了100个以上。分
布式架构造成大量冗余,整车复用性低,使造车成本大大增加,不能适应发展需要。经过功能集成化、集中化发展,发展到了如今应用最广泛的域集中式电子电气架构,将整车划分为了几个区域,每个区域一个域中心控制器,也就是行业认可的域控制器。通过域控制器来实现辅助驾驶、车身控制以及汽车娱乐功能的局部集中化处理,减少了冗余,提高了效率。未来汽车电子电气架构还会向车辆集中控制电子电气架构发展。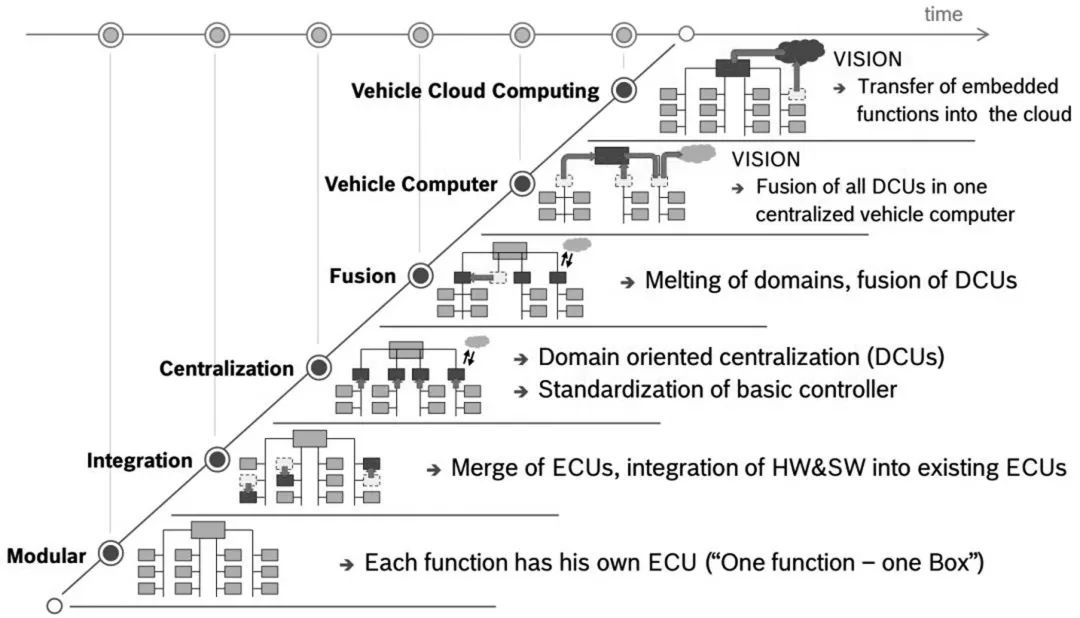
图1 电子电气架构演变
1.2.2 域控制器
在汽车电子电气架构发展的过程中,域控制器是不得不被提及的。当前智能汽车上电子元件的数量增长非常显著,仅仅依靠ECU已经不能满足目前发展的需要。域控制器搭建了分布式汽车电子电气架构向集成式汽车电子电气架构的桥梁。
汽车电子按“域”划分,传统上这些域之间无论是机械、电气还是控制上都是相互独立的,如今这些域之间有了更多的交互。华南理工大学提出基于模型的面向L4自动驾驶级别,面向服务且具有协同计算能力的电子电气架构。采用域控制器集中式架构,将电子电气架构分为5个域,分别是车身控制域、智能驾驶域
1、智能驾驶域
2、信息娱乐域和新能源域
由以太网实现各个域控制器之间的信息交互,实现信息共享。高级辅助驾驶(Advanced Driver Assistance Sys⁃tem,ADAS)功能与车载网络互联功能的出现衍生出新的系统,比如高级驾驶辅助系统和驾驶员/行人安全系统、人机界面(Human Machine Interface,HMI)和远程信息处理系统等。
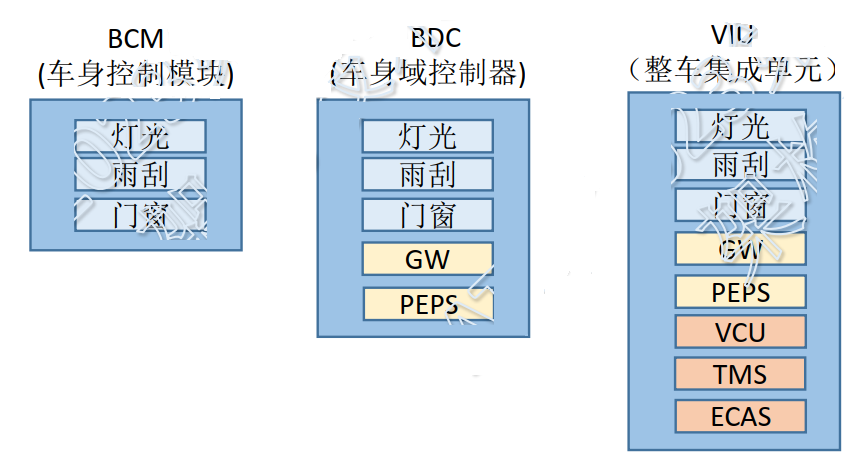
当前,域控制器与传感器还有各个功能执行器之间的数据集需要提前设定好。为保证自动驾驶过程的稳定性,电子电气架构在设计之初就应该设定好汽车有几个域,每个域的工作模式还有各个域之间的连接器跟传感器的方式。根据域控制器功能的不同,具体的内部结构也有所不同,如图2所示。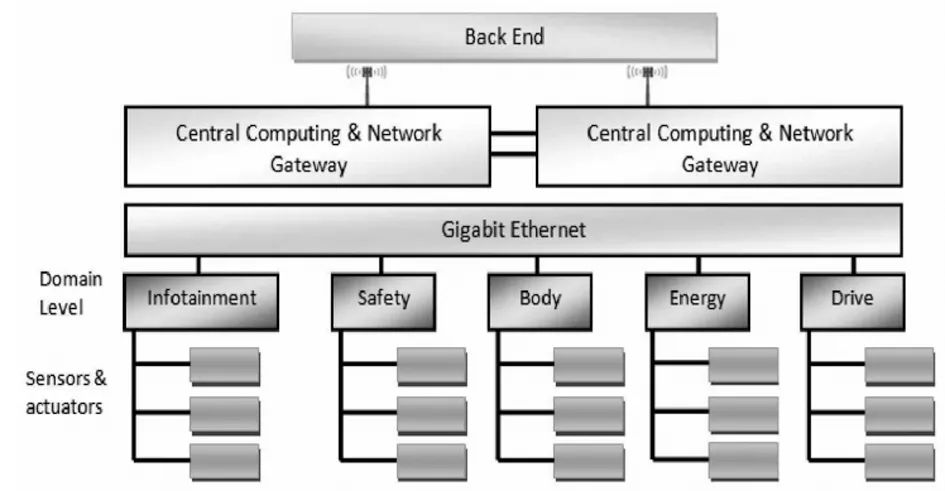
图2 基于功能和中央网关的域控制器
随着时代的发展,未来的汽车上面各个域的联系必定会更加密切,例如底盘域和动力总成域、动力总成域和驾驶辅助域之间的联系也会更加密切。
2 通信系统
2.1 总线系统
汽车电子电气架构各个硬件间的信息传递需要依靠通信系统。在当代汽车架构中存在许多通信协议和通信技术,主要通信技术有5种:局域互联网(Local Interconnect Network,LIN)、控制器局域网(Controller Area Network,CAN)、FlexRay总线、面向多媒体的系统传输(Media Oriented System Transport,MOST)、低电压差分信号(Low-Voltage Differential Sig⁃naling,LVDS)。前4种是专门为汽车设计使用的,其主要特性如表1所示。 表1 各类总线特性表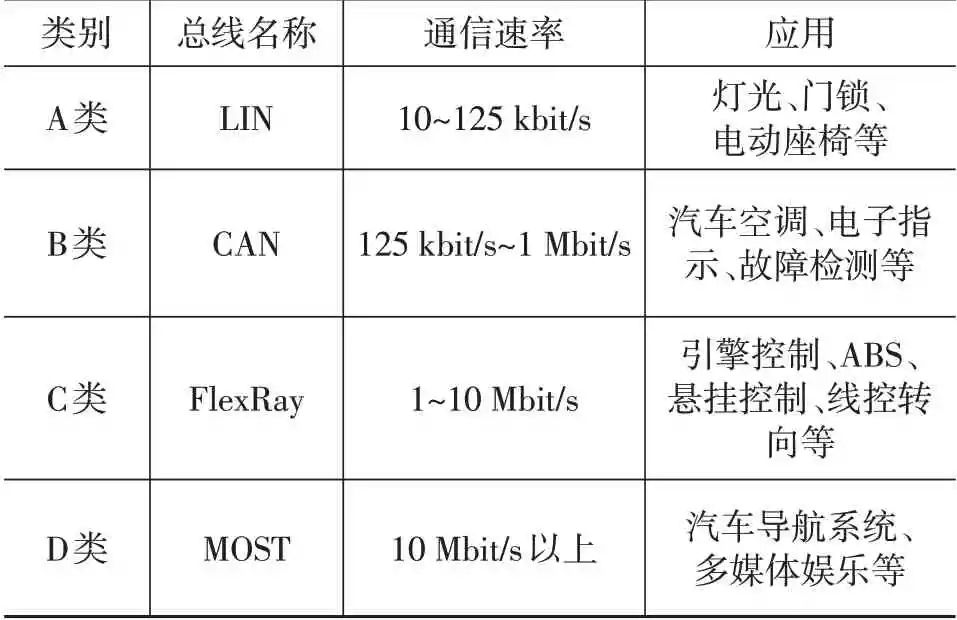
目前,汽车上运用最广泛的仍然是基于CAN总线的车载总线系统,其优点如下。
(1)汽车中各电子部件通过CAN总线能够实现信息共享,极大地提高了各电子部件获取信息的能力;
(2)CAN总线采用“多主方式”的媒体访问机制,总线中的各个节点相互独立、互不干扰,即使某一节点出现故障,总线仍旧能正常工作,并且各节点公平享有主线使用权利;
(3)CAN总线采用双线差分电压的方式进行通信,且具备消息自动重发、CRC校验、应答机制,总线通信的安全性和数据准确性有保障;
(4)CAN总线的最大通信速率为1 Mbit/s,通信速率比较高,实时性好;
(5)构建CAN总线网络时,仅通过屏蔽双绞线连接各个网络节点就能达到较好的抗电磁干扰效果,成本低廉。
CAN的上述优点使其成为当前汽车上运用最广泛的车载总线,但是随着汽车行业的发展,汽车上智能驾驶等级不断提高,汽车上电子元器件数量呈指数级上升,导致车辆上传递的报文数量越来越多,信息交换的次数大大增加,车载总线网络负荷率增大,电子元器件之间的信息传递不稳定。CAN总线的不可预测性、传输速度慢和传输距离有限的缺点会在汽车通信网络高负载时导致无法预测的问题,使行驶安全性得不到保障。
CAN总线在未来很长一段时间依然是最主要的车载通信网络,但是需要对CAN总线网络传输延时的问题进一步研究,进行仿真实验、算法优化,提高CAN总线的实时性。同时,也不能仅仅局限于CAN总线,一些标准化协会、技术组织一直在推出各自的确定性网络的实现机制,例如工业上广泛运用的工业以太网、时间敏感型网络(Time Sensitive Networking,TSN)、DetNet和时间触发以太网(Time-triggered Ethernet,TTE)。
2.2 车载以太网
以太网技术的发展给人们的生活方式带来了很大的进步,从以太网的发明到现在已经过去了大约半个世纪,以太网相关技术已经发展成熟。2013年宝马公司在X5型号汽车上首次搭载车载以太网,迈开了车载以太网的第一步。车载以太网相较于总线网络的优点如下。
(1)高带宽、传输距离远; (2)支持多种协议和功能; (3)适应未来发展趋势; (4)无线功能。
由Bosch的车载通信网络图可以发现目前车载网络的模式依然是CAN总线为主(图3),车载以太网为辅。车载以太网在未来的智能汽车上重要性会不断提高。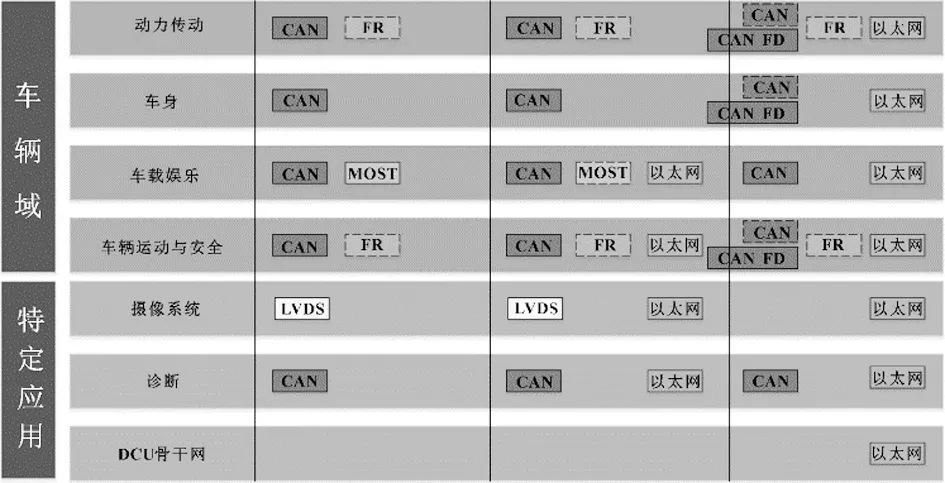
图3 车载通信网络
车载以太网的发展面临的挑战依然严峻,虽然各个标准化组织正积极推动其发展,但是各类标准的完善和落地还需时间。其次,当前推进车载以太网的配套开发工具、测试设备的力度依然不足。最后,车载以太网的使用必定会给汽车的信息安全保障带来挑战,这也是未来开发人员需要考虑的问题。
罗峰等已经提出一种车载网关防火墙保护车辆的CAN/FD和以太网总线。未来,CAN/FD和以太网将成为车辆的骨干网络,大部分数据将通过这2个总线传输,因此,CAN/FD和以太网将更容易受到攻击者的攻击。车载网关是车辆的数据中心,它将CAN/FD与以太网连接在一起。
3 主流电子电气架构
汽车电子电气架构正处于由分布式发展到集中式的过渡阶段,这是电子电气架构发展的趋势。各个厂家各自设计开发的电子电气架构虽说都具有其特点,但也都是由分布式到集中式架构发展而不断优化的。本节就根据设计理念的不同来介绍几个厂家的电子电气架构。
3.1 基于功能域控制器集中化的架构
博世作为整车Tier1供应商的重要代表,提出了未来智能汽车电子电气架构的演进方向。从最开始的第1代模块化架构经过集成化、中心化在经过模块间的融合,再到形成行车电脑,将所有的域控制器融合到一个行车电脑上,最终发展到将每一台汽车都连入车联网,汽车不需要安装行车电脑,所有的计算都将由云服务来完成,减少了整车的制造成本,提高了使用效率。
现在正处于第4阶段到第5阶段的过渡时期,在这一阶段还是处于优化多域控制器的阶段。 联合电子设想未来汽车电子电气架构分为3层,如图4所示。联合汽车电子设计的未来汽车电子电气架构也是基于功能域控制器集中化的架构。上层是云计算,这是未来汽车发展大趋势。中间层为计算与控制层,底层是标准化执行器和传感器。计算与控制层是设计电子电气架构中关键的一层,是连接云服务平台和各个执行器传感器之间的桥梁。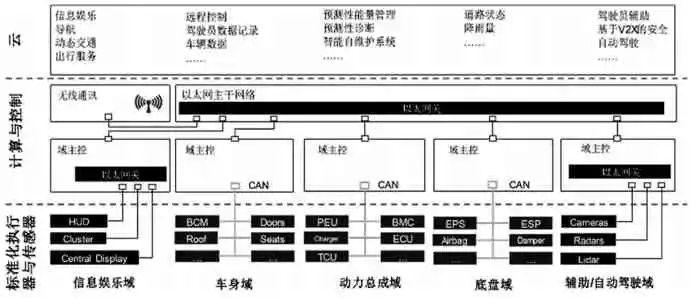
图4 未来汽车电子电气架构
3.2 基于区域控制器和中央计算的架构
丰田公司的中央/地方概念的电子电气架构是在车身模型上面进行设计开发的。这样设计的汽车电子电气架构虽说本质上与其他厂家设计是一致的,这一架构突出了集中化中央计算的作用,也正是当前研发创新的重点方向。新一代的中央/地方架构有如下特点。
(1)动力上可最大限度地减少区域线路;
(2)网络仅是局部变化,如通讯矩阵,也大大减少区域线路;
(3)安装只需为附加ECU留出空间;
(4)逻辑上只需改变中央ECU的软件。
特斯拉实现了“软件定义汽车”,使汽车加速向移动的智能终端进化。2021年,特斯拉成为了全球车企中市值最高的车企,作为一个出世不久的品牌凭借几款纯电动汽车就达到了如此高度,最为关键的就是特斯拉主打卖点:智能化。特斯拉汽车的电子电气架构有其独到之处,从最早的Model S上的已经有了较为明显的域划分概念再到Model X开始出现跨网段特征,有比较明显的多域控制器MDC趋势,到如今最火爆的车型Model 3上实现向多域控制器阶段的转变,特斯拉的电子电气架构达到了其它车企还未达到的高集成度。
3.3 基于环形主干网和多计算中心架构
安波福的智能汽车架构(Smart Vehicle Architec⁃ture,SVA)白皮书中提到SVA开发设计的3项基本原则。
(1)降低复杂性。通过简化车辆内的硬件和软件拓扑结构,减少了当前启用各种功能所需的许多不同ECU之间的相互依赖性;
(2)统一不同的应用程序。SVA将来自车辆多个不同领域的软件结合在一起,以解锁新功能并改进生命周期管理;
(3)授权给原始设备制造商。SVA使原始设备制造商拥有完全控制相关主要软件的能力(如定义车辆用户体验的软件),并随着时间的推移能够不断地增强其功能。
通过这3项基本原则来实现将软件从硬件中分离的目的,并实现基于服务器计算的功能。
在SVA中,传感器的信息获取和处理位于车辆的乘客舱的中央,而不是分布在车辆的周围(图5)。这有助于降低系统总成本以及传感器组件的成本,进而降低与传感器相关、小事故相关的成本,从而降低保险成本。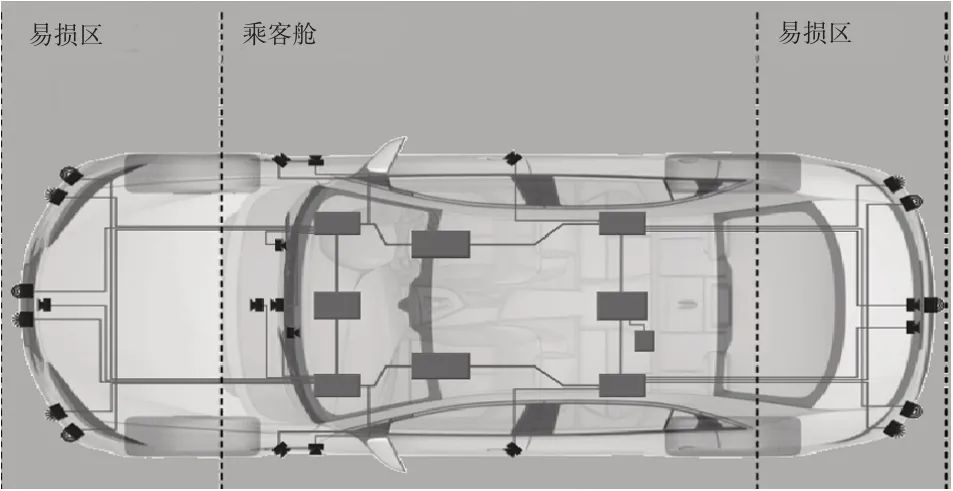
图5 智能汽车架构
华为也在汽车电子电气架构这一领域做出了贡献。他们提出的CC架构如图6所示,将汽车分为了3个区域。相比一般的汽车电子电气架构域的划分,这种划分集成度更高,通过分布式网络架构将3大区域连接。CC架构支持软、硬件的升级,是未来汽车上不可或缺的功能。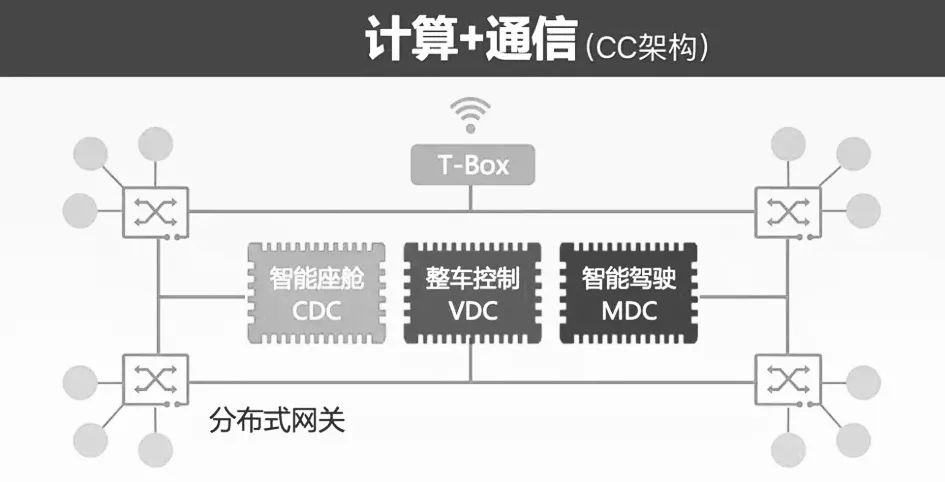
图6 华为CC架构
4 结束语
汽车行业正在经历从传统汽车向智能汽车过渡的阶段,汽车电子电气架构也正处于分布式向集中式过渡的时期。从汽车厂家的发展方向可以看出,现在用户对于汽车的追求已经不再满足于动力性、驾驶平顺性、燃油经济性等传统汽车性能。各个厂家研发设计的汽车电子电气架构在结构上虽有些区别,但是发展的趋势是相同的。未来汽车必定是聚焦智能化、电动化、网联化、共享化方向发展,随着汽车上电子元件数量的增多,汽车电子电气架构的重要性显得越发重要。
审核编辑:刘清


















 工商网监
工商网监
评论