混合电动汽车能量流仿真系统设计与分析(2)
2012年05月29日 11:47 来源:本站整理 作者:秩名 我要评论(0)
选用Microchip公司的PIC18F6720为主控制器,该MCU片内集成多通道的10位精度的采样转换器,可以方便的采集电池的电压、充电电流、放电电流和电池温度等多种信号;内置两个串行通信接口,可以与上位机进行异步通信;SPI接口可以用来扩展内部总线;PWM输出可以对回路电流进行调节等。控制系统电路如图5所示。
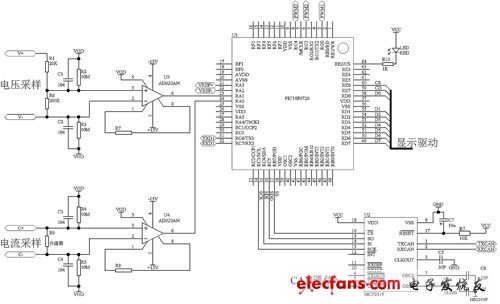
图5 控制系统电路
4 人机交互
通过LCD显示器可以直观的显示系统的工作状态和电池工作情况,具有良好的人机交互界面。在控制系统中设置了短路与过热保护,故障报警指示,最大限度达到系统的安全可靠,保护系统与动力电池的安全。图6为LCD显示的示意图。
(a)工作状态
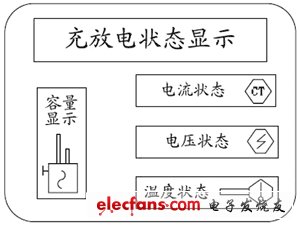
(b)测试状态
图6 LCD显示示意图
通信系统
系统内建了两种通信总线:CAN2.0B和RS-232C。
1 CAN总线通信
CAN总线是专为解决现代汽车中各种控制器、执行机构、监测仪器和传感器之间的数据通信而开发的总线式串行通信技术。但CAN只包括了物理层和数据链路层,在汽车工程师协会SAE推荐的标准SAE J1939进一步规范了汽车内部网络的标准。
J1939采用CAN2.0B的扩展帧格式。进一步定义了CAN数据帧仲裁域中的标识位。29位ID的格式如表1所示。
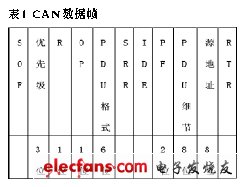
一个协议数据单元(PDU)包括7个预定的域。它们是优先级、保留位、数据页、PDU格式、PDU细节、源地址和数据域。CAN数据帧中的SOF、SRR、IDE和RTR部分控制域,CRC、ACK和EOF没有包括在PDU。
数据域为0~8字节的数据。当需要使用9~1785字节来表达某个参数组时,数据通信将由多个CAN数据帧完成。
本文导航
- 第 1 页:混合电动汽车能量流仿真系统设计与分析(1)
- 第 2 页:控制系统电路
- 第 3 页:RS-232C通信
上周热点文章排行榜
上周资料下载排行榜
论坛热帖
热门博文
创新实用技术专题


热评
- LM3S9B96开发板手册及原理图
- STM32F103ZET6红牛电路图
- 高通发布全新设计DragonBoard板
- NI推出Single-Board RIO嵌入式介面
- protel99se正式汉化版免费下载
- hi3515海思原版原理图
- matlab 7.0软件下载(免费破解版)
- TX-1C型单片机开发板原理图
- 三菱A500变频器原理图
- 三相IGBT全桥隔离驱动电源设计
博文
- 问什么邮箱激活不了
- 八成大学生认同先就业后择业
- 我的心路
- 为什么邮箱激活不了
- 到底有多少人在校园里浪费青春
- 你是否曾这样伤害过一个人?
- 到底有多少人在校园里浪费青春
- 小小的电阻,您真的吃透了它的用法吗
- 2012.5.12 第一个DS18B20程序
- 宁愿睡地板,也要创业做老板!

用户评论
查看全部 条评论
查看全部 条评论>>